

1 Технічні дані двигуна пбк 120/25
Номінальні дані:
Обмоточні дані
Обмотка якоря:
2р = 8; число витків на полюс – 540; R15°С = 0,0131 Ом при 15С.
Паралельна обмотка:
2р = 8; число витків на полюс – 450; R15°С = 10,9 Ом при 15С.
Додатковий полюс:
число витків на полюс – 5; R15°С = 0,00728 Ом при 15С.
Компенсаційна обмотка:
число витків на полюс – 6; R15°С = 0,00606 Ом при 15С.
Збудження:
![]()
![]()
2 Функціональна схема
Метою завдання було розробити та змоделювати систему ТП – Д з реверсом за колом збудження. В таких електроприводах не ставляться високі вимоги до динамічних властивостей. В цьому випадку з метою економії та зменшення габаритів перетворювача в якірному ланцюгу виконується нереверсивним, а в ланцюгу збудження – реверсивним. Здійснення рекуперації та реверса в цьому випадку за допомогою зміни напрямку струму в ланцюгу збудження.
Функціональна схема такої системи має вигляд:
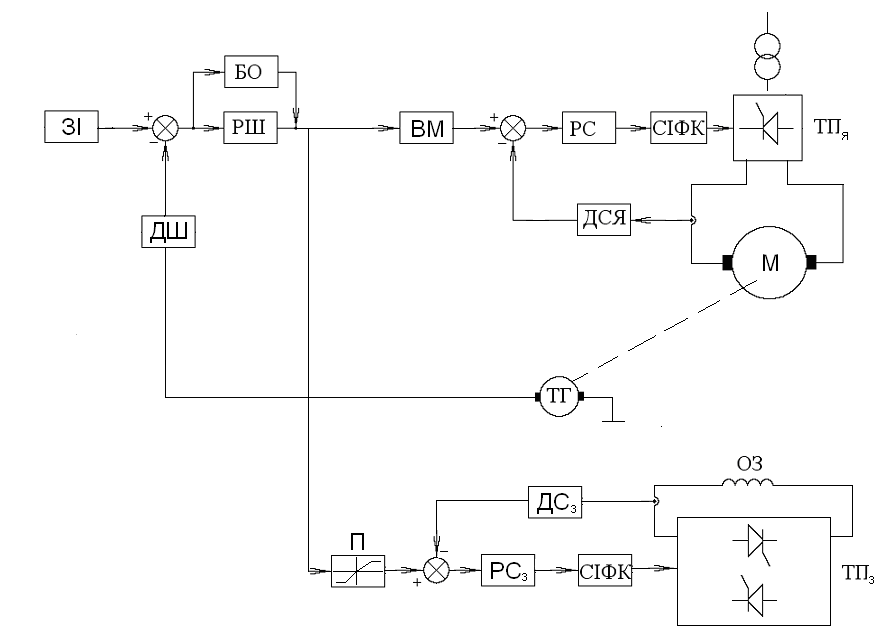
Рисунок 2.1 – Функціональна схема системи
Оскільки
струм якоря однополярний, то на виході
регулятора швидкості стоїть блок
виділення модулю ВМ. В разі зміни
полярності вихідного сигналу регулятору
швидкості, він не впливає на полярність
напруги завдання струму
![]() ,
але через узгоджуючий підсилювач П
впливає на перетворювач, живлючий ОЗ
двигуна, що дозволяє змінити напрямок
обертання двигуна.
,
але через узгоджуючий підсилювач П
впливає на перетворювач, живлючий ОЗ
двигуна, що дозволяє змінити напрямок
обертання двигуна.
Для того, щоб запобігти коливальним процесам та втратам при малих навантаженнях у системі застосовується одночасне узгодження керування струмом та потоком двигуна.
Вихідний сигнал РШ разом з входом регулятора посилює на вхід РСЗ через узгоджуючий підсилювач П з обмеженим виходом при переході двигуна в гальмувальний режим змінюється знак сигналу на виході регулятора швидкості. При цьому струм збудження потоком змінює знак і тиристорний перетворювач якірного ланцюгу переходить в інверторний режим.
Узгодження
сигналів завдання струму якоря та струму
збудження здійснюється шляхом обирання
коефіцієнти підсилювання підсилювача
П рівня його обмеження. Підсилювач П
настроюється так, щоб номінальне значення
струму збудження досягається при![]() .
.
Така
побудова схеми забезпечує зменшення
часу реверса моменту та достатню
плавність його зміни при переході з
двигунного режиму в гальмувальний та
навпаки. При малих струмах![]() в цій схемі динамічні властивості КРШ
погані, оскільки зменшення магнітного
потоку знижує контурний коефіцієнт
підсилення КРШ.
в цій схемі динамічні властивості КРШ
погані, оскільки зменшення магнітного
потоку знижує контурний коефіцієнт
підсилення КРШ.
3 Вибір силової схеми електроприводу
На підставі номінальних даних двигуна ПБК 120/45: UH=800 B, ІН=1190 А приймаємо систему електроприводу КТЭУ – 1600/930 – 12212 – УХЛ4, де ІН=1600 А, UH=930 B, приведений на рисунку 3.1.
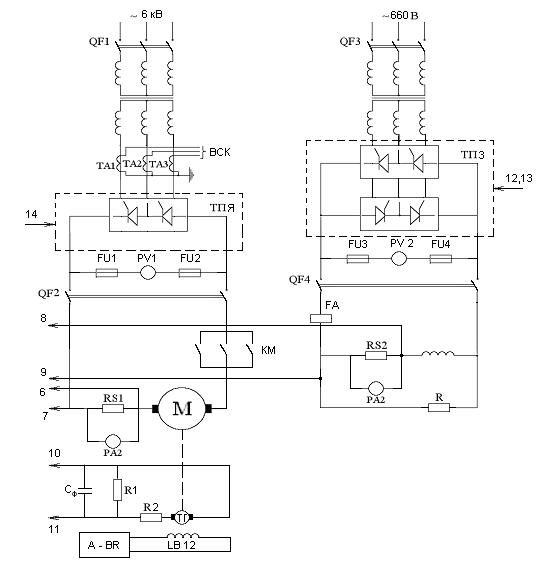
Рисунок 3.1 – Силова система електроприводу КТЭУ – 2500/930
Параметри трансформатора TV1 – ТСЗП – 1600/10УЗ
U=6 кB, РХХ=3400 Вт, РКЗ=135000 Вт, UКЗ=6 %, ІХХ=11 %.
Вентильна обмотка: U=717 B, І=1308 А.
Параметри трансформатора TV2 – ТСП – 16/07 – УХЛ4
U=600 B, РХХ=140 Вт, РКЗ=550 Вт, UКЗ=5,2 %, ІХХ=10 %.
Вентильна обмотка: U=205 B, І=41 А.
Визначимо параметри системи з врахуванням умов завдання:
номінальна швидкість обертання:
![]()
конструктивна стала:
![]()
опір якірного кола двигуна:
![]() ,
,
сумарний момент інерції:
![]()
де
![]()
час розгону двигуна до номінальної швидкості:
 ,
,
необхідна індуктивність якірного колу:
![]()
де

![]() –кордонний
коефіцієнт,
–кордонний
коефіцієнт,
індуктивність дроселя:
![]()
з цього виразу робимо висновок, що дросель не потрібен.