

Задачи-2013
.pdfКиїв – 2013
Задача№21
А
3
1
Б
2
4
6
В
Г
5
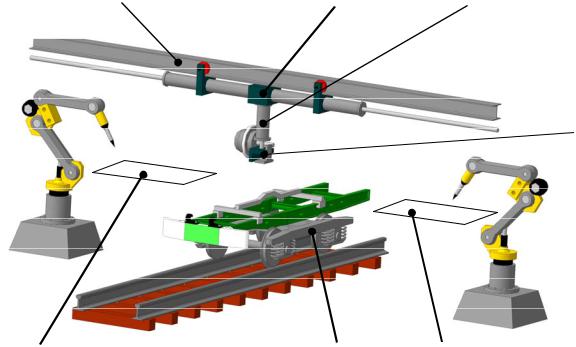
Объект автоматизации: Дозатор паст и пластичных строительных материалов.
Автоматизированный дозатор выполняет расфасовку шпатлевки и других пластичных материалов в упаковочную тару объемом 2 и 5 литров. Материал находится в бункере А под давлением 10 бар. Сначала, емкость дозатора Б за 3 секунды заполняется 7,3 литрами пластичного материала из бункера А через впускной клапан 1. Затем, клапан 1 отсекает емкость Б от бункера, а выпускной клапан 2 открывает канал, соединяющий дозатор с пустой емкостью объемом 2 литра, которая находится в зоне расфасовки. После этого гидропривод 3 перемещает вытеснитель до датчика 4, вытесняя из дозатора 2 литра пластичного материала в упаковочную тару В. Заполненная тара В отводится из рабочей зоны, а на её место устанавливается пустая тара Г объемом 5 литров. Замена заполненной тары на пустую на позиции расфасовки выполняется поворотом стола на 180°, который приводится в движение гидравлическим цилиндром 5. После этого гидропривод 3 перемещает вытеснитель до датчика 6, вытесняя из дозатора 5 литров пластичного материала в упаковочную тару Г. Затем гидроцилиндр 5 возвращается в исходное положение (стол поворачивается на 180°), устанавливая заполненную тару емкостью 5 литров в зону отгрузки, а пустую тару емкостью 2 литра на позицию расфасовки. Замену
40
Київ – 2013
заполненной тары на пустую на позиции отгрузки поворотного стола выполняет пневматический манипулятор в течение 3 секунд. После этого закрывается выпускной клапан 2 дозатора, а затем гидропривод 3 возвращает вытеснитель в исходное положение.
После того, как все приводы возвратятся в исходное положение, система повторяет цикл расфасовки. Контроль времени для заполнения дозатора выполняется с помощью электрического реле времени или таймера.
Задача 21.а. Составить электрогидравлическую схему и управляющую программу в среде FST язык STL для управления работой привода вытеснителя и поворотного стола дозатора (используются приводы 3 и 5). Контроль наличия пустой тары на поворотном столе имитируется электроконтактной кнопкой без фиксатора. Временем работы манипулятора пренебречь. Включение работы приводов в режиме длительного цикла по нажатию кнопки S1 без фиксатора, выключение - повторным нажатием S1.
Задача 21.б. Составить электрогидравлическую схему и управляющую программу в среде FST язык LD для управления работой привода вытеснителя и поворотного стола дозатора (используются приводы 3 и 5). Контроль наличия пустой тары на поворотном столе имитируется электроконтактной кнопкой без фиксатора. Временем работы манипулятора пренебречь. Включение работы приводов в режиме длительного цикла по нажатию кнопки S1 без фиксатора, выключение - повторным нажатием S1.
Задача 21.в. Составить электрогидравлическую схему и управляющую программу в среде FST язык STL для управления работой устройства дозирования пластичных материалов (используются приводы 3, 5 и клапаны 1, 2). Включение работы устройств в режиме длительного цикла по нажатию кнопки S1 без фиксатора, выключение - повторным нажатием S1.
Задание повышенной сложности. Дополнить управляющую программу задачи 21.в. сервисными режимами:
•первое нажатие S1 – длительный цикл работы системы;
•второе нажатие S1 – завершение циклической работы системы;
•первое нажатие кнопки S4 – переход в режим ручного управления приводами: 3 – кнопка S1, 5 – кнопка S2;
•повторное нажатие кнопки S4 – выход системы из режима ручного управления.
Решение задачи включает:
−список оборудования,
−схему подключения элементов системы,
−описание работы системы,
−собранную и отлаженную систему на учебном стенде.
41
Київ - 2013
Задача№22
Г |
3 |
1 |
2
A |
В |
Б |
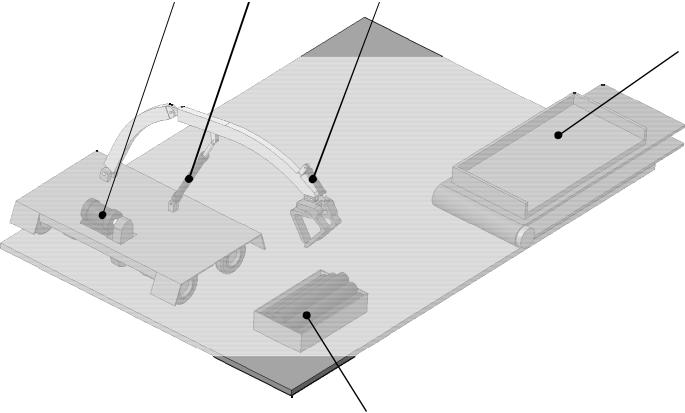
Объект автоматизации: Манипулятор-погрузчик автоматизированной линии по изготовлению сварных рам большегрузных автомобилей.
Автоматизированный участок по изготовлению сварных рам грузовых автомобилей объединяет два сварочных автомата. На рабочие позиции автоматов А и Б, по очереди, с помощью гидравлического манипуляторапогрузчика, подается каркас каждой рамы. На позиции А выполняется установка дополнительных перемычек рамы, после чего на позиции Б привариваются ребра жесткости.
Предварительно собранный в специальном кондукторе каркас подается на участок на транспортной тележке В. Транспортная тележка с кондуктором, установленным на платформе, останавливается под средним положением манипулятора Г. После этого привод 1 с закрепленным на нем схватом 2 опускается к кондуктору с каркасом. Гидравлический схват манипулятора 2 сжимает и удерживает кондуктор с каркасом. Привод 1 поднимает схват с каркасом, а горизонтальный привод 3 перемещает его на позицию А. На позиции А в течение технологического времени Т1 с помощью специального оборудования выполняются сварочные работы. После этого привод 3 перемещает каркас на позицию Б и в течение технологического времени Т2 выполняются сварочные работы по установке ребер жесткости. Манипулятор с
42
Київ - 2013
каркасом перемещается в среднее положение и привод 1 опускает схват к платформе транспортной тележки, после чего гидравлический схват 2 отпускает готовое изделие. После этого привод 1 возвращается в исходное положение.
После того, как все приводы возвратятся в исходное положение, и будет подана транспортная тележка со следующим каркасом, система повторяет цикл изготовления рамы. Контроль времени для выполнения сварочных работ выполняется с помощью электрического реле времени или таймера.
Задача 22.а. Составить электрогидравлическую схему и управляющую программу в среде FST язык STL для управления работой вертикального и горизонтального гидроприводов манипулятора (используются приводы 1 и 3). Контроль наличия тележки с установленным каркасом в кондукторе имитируется электроконтактной кнопкой без фиксатора. Перемещение на позицию А соответствует втягиванию штока. Время выполнения сварочных работ на позициях А и Б составляет по 5 секунд. Временем переключения схвата пренебречь. Включение работы приводов в режиме длительного цикла по нажатию кнопки S1 без фиксатора, выключение - повторным нажатием S1.
Задача 22.б. Составить электрогидравлическую схему и управляющую программу в среде FST язык LD для управления работой вертикального и горизонтального гидроприводов манипулятора (используются приводы 1 и 3). Контроль наличия тележки с установленным каркасом в кондукторе имитируется электроконтактной кнопкой без фиксатора. Перемещение на позицию А соответствует втягиванию штока. Время выполнения сварочных работ на позициях А и Б составляет по 5 секунд. Временем переключения схвата пренебречь. Включение работы приводов в режиме длительного цикла по нажатию кнопки S1 без фиксатора, выключение - повторным нажатием S1.
Задача 22.в. Составить электрогидравлическую схему и управляющую программу в среде FST язык STL для управления работой сварочного автомата (используются приводы 1, 2, 3). Включение работы приводов в режиме длительного цикла по нажатию кнопки S1 без фиксатора, выключение – повторным нажатием S1.
Задание повышенной сложности. Дополнить управляющую программу задачи 22.в. сервисными режимами:
•первое нажатие S1 – длительный цикл работы системы;
•второе нажатие S1 – завершение циклической работы системы;
•первое нажатие кнопки S4 – переход в режим ручного управления приводами: 1 – кнопка S1, 2 – кнопка S2, 3 – кнопка S3;
•повторное нажатие кнопки S4 – выход системы из режима ручного управления.
Решение задачи включает:
−список оборудования,
−схему подключения элементов системы,
−описание работы системы,
−собранную и отлаженную систему на учебном стенде.
43
Київ - 2013
Задача № 23
3 |
2 |
1 |
Б
А
Объект автоматизации: Гидравлический привод мобильного погрузчика деревообрабатывающего комбината.
Подготовленные к промышленной переработке бревна древесины собираются на участке и грузятся на специальную площадку А. Погрузчик, приводимый в движение с помощью шасси, оборудованного реверсивным гидромотором 3, подъезжает к предварительно обработанному бревну. Погрузчик с помощью привода 2 опускает схват к бревну, захватывает его с помощью гидравлических прижимов 1 и поднимает на транспортную высоту приводом 2. Погрузчик подвозит бревно к платформе площадки Б, после чего привод 2 опускает бревно на высоту разгрузки и разжимаются прижимы 1. Во время движения колеса погрузчика вращаются за счет гидромотора 3. После освобождения бревна, на что затрачивается не более 5 секунд, привод 2 поднимает схват в транспортное положение и погрузчик подъезжает к следующему бревну.
Остановка погрузчика возле площадки Б контролируется с помощью установленного на платформе площадки датчика и выполняется автоматически,
44
Київ - 2013
по достижению шасси бортика платформы Б. Остановка погрузчика возле бревна выполняется по сигналу, подаваемому оператором.
После того, как очередное бревно отгружено и приводы 1 и 2 возвратятся в исходное положение, а оператор остановит шасси погрузчика возле следующего бревна, гидравлическая система повторяет цикл погрузки. Контроль времени для отпускания бревна выполняется с помощью электрического реле времени или таймера
Задача 23.а. Составить электрогидравлическую схему и управляющую программу в среде FST язык STL для управления работой привода вертикального перемещения и гидромотора шасси погрузчика (используются приводы 2 и 3). Контроль остановки погрузчика возле бревна имитируется электроконтактной кнопкой без фиксатора. Контроль приближения погрузчика к бортику площадки Б имитируется датчиком. Время работы схвата 1 составляет 5 секунд. Включение работы приводов в режиме длительного цикла выполняется по нажатию кнопки без фиксатора S1, остановка системы после завершения цикла - повторным нажатием S1.
Задача 23.б. Составить электрогидравлическую схему и управляющую программу в среде FST язык LD для управления работой привода вертикального перемещения и гидромотора шасси погрузчика (используются приводы 2 и 3). Контроль остановки погрузчика возле бревна имитируется электроконтактной кнопкой без фиксатора. Контроль приближения погрузчика к бортику площадки Б имитируется датчиком. Время работы схвата 1 составляет 5 секунд. Включение работы приводов в режиме длительного цикла выполняется по нажатию кнопки без фиксатора S1, остановка системы после завершения цикла - повторным нажатием S1
Задача 23.в. Составить электрогидравлическую схему и управляющую программу в среде FST язык STL для управления работой погрузчика (используются приводы 1, 2, 3). Включение работы приводов в режиме длительного цикла по нажатию кнопки S1 без фиксатора, выключение – повторным нажатием S1.
Задание повышенной сложности. Дополнить управляющую программу задачи 23.в. сервисными режимами:
•первое нажатие S1 – длительный цикл работы системы;
•второе нажатие S1 – завершение циклической работы системы;
•первое нажатие кнопки S4 – переход в режим ручного управления приводами: 1 – кнопка S1, 2 – кнопка S2, 3 – кнопка S3;
•повторное нажатие кнопки S4 – выход системы из режима ручного управления.
Решение задачи включает:
−список оборудования,
−схему подключения элементов системы,
−описание работы системы,
−собранную и отлаженную систему на учебном стенде.
45