

Лекція 3. Класифікація систем автоматичного управління
Усі розглянуті залежно від цілей управління види систем класифікуються також за характером внутрішніх динамічних процесів. За такою класифікацією існують лінійні і нелінійні САУ, системи прямої і непрямої дії, безперервні (аналогові) і дискретні [3].
До лінійних належать САУ, всі процеси в яких з достатнім ступенем точності описуються лінійними рівняннями. Якщо хоча б в одному елементі САУ суттєво порушується лінійність його характеристики, вся система розглядається як нелінійна. Відверто кажучи, на практиці не зустрічається абсолютно лінійних систем і об'єктів. Однак, враховуючи конкретний діапазон роботи САУ, її характеристики замінюють лінійними, що дозволяє для їхнього розрахунку і синтезу використовувати порівняно простий апарат дослідження лінійних систем.
Під системами прямої дії розуміють регулятори, в яких вимірювальний пристрій безпосередньо впливає на регулюючий орган, використовуючи при цьому енергію самого об'єкту, що управляється. Класичним зразком такого регулятора може бути центробіжний регулятор швидкості. Кут відхилення вантажів, що обертаються за рахунок енергії двигуна через кінематичну передачу, перетворюється на переміщення заслінки подачі робочої суміші до двигуна. В системах непрямої дії обов'язково є підсилювальної перетворювальні пристрої, які використовують для регулювання зовнішні джерела енергії. Ці САУ можуть вирішувати значно більш складні завдання управління і тому мають незрівнянно більш широке застосування в сучасному металооброблювальному обладнанні.
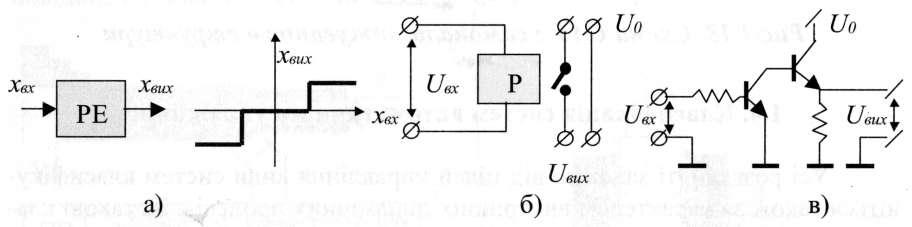
До дискретних САУ належать також і релейні системи, побудовані на релейних елементах (рис. 1.14, а). Найпростішим релейним елементом є електромагнітне реле (рис. 1.14, б). При збільшенні вхідної напруги до певної величини реле спрацьовує і на виході з'являється напруга Ueux=Uo.
Рис. 1.14. Релейні елементи: а) - схематичне зображення та характеристика; б) - електромагнітне реле; в) - транзисторний ключ
Використовують також безконтактні релейні елементи, наприклад, транзисторні ключі, у яких при подачі керуючого (вхідного) сигналу опір змінюється стрибком (рис. 1.14, в). Якість такого ключа характеризується відношенням опору в закритому стані до опору у відкритому стані. Ця величина може сягати 106, тому чутливість електронних ключів значно перевищую чутливість електромагнітних реле.
На релейних елементах може бути побудована, наприклад система
стеження (рис. 1.15).
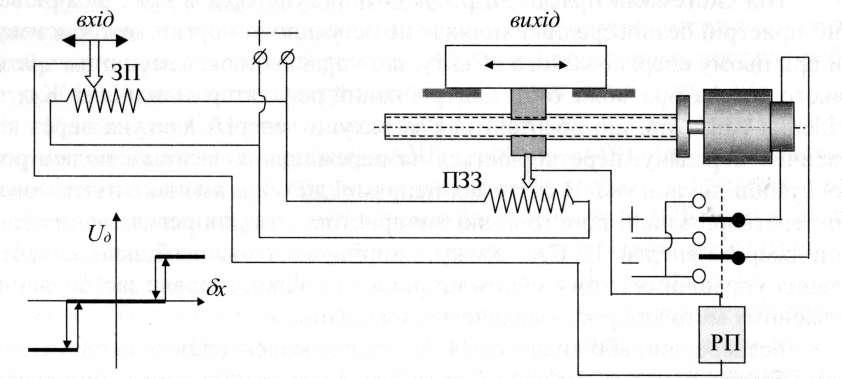
Рис. 1.15. Релейний привід стеження та його характеристика
Потенціометр, що задає, (ЗП) і потенціометр зворотного зв'язку (ПЗЗ) з'єднані за мостовою схемою і підключені до джерела постійної напруги Uі. У діагональ мосту ввімкнена бобіна поляризованого реле (РП).
Реле є трипозиційним і містить контактну групу, що підключає двигун постійного струму (Д) до джерела живлення. Напрямок спрацьовування реле згідно з його характеристикою залежить від знака керуючої напруги. Оскільки САУ є замкненою, напруга, що підводиться до бобіни РП пропорційна помилці і має той же знак. Коли помилка досягає величини порогу, реле спрацьовує і двигун Д підключається до джерела живлення так, що напрямок його обертання забезпечує переміщення робочого органу в напрямку зменшення помилки. Рух припиняється, коли помилка стає меншою за значення порогу.

Рис. 1.16. Часові діаграми функціонування ЦАПІ АЦП
Цифровий привід стеження, що використовується у верстатах з ЧПУ і промислових роботах (рис. 1.17), складається з дискретної та аналогової частин.

Рис. 1.17. Цифровий привід стеження
Аналогова частина будується на основі тиристорного або транзисторного перетворювача (ТП), двигуна постійного струму (Д), редуктора і об'єкту, що управляється - супорта верстата або робочого органу робота. Для підвищення точності роботи САУ в якості вимірювального пристрою зворотного зв'язку використовують кодовий вимірювальний пристрій (КП).
Кодовий вимірювальний пристрій перетворює аналогову величину - переміщення об'єкта, що управляється, на цифровий код. САУ має вхід, який, звичайно, комутується з процесором. Для узгодження дискретної і аналогової частин в канал регулювання введений цифро-аналоговий перетворювач.
Інколи, при складних цілях управління, вплив, що задається, необхідно визначати розрахунком за математичною моделлю на основі інформації, яка одержується від вимірювального пристрою зворотного зв'язку. В цьому випадку виникає необхідність включення в контур регулювання ЕОМ, що перетворює всю систему на дискретну. Широко застосовують ЕОМ в контурі регулювання САУ також при створенні адаптивних екстремальних систем.
Інколи, при складних цілях управління, вплив, що задається, необхідно визначати розрахунком за математичною моделлю на основі інформації, яка одержується від вимірювального пристрою зворотного зв'язку. В цьому випадку виникає необхідність включення в контур регулювання ЕОМ, що перетворює всю систему на дискретну. Широко застосовують ЕОМ в контурі регулювання САУ також при створенні адаптивних екстремальних систем.