

Вопрос 5
Привести основные варианты реализации датчиков положения, описать принцип действия, схемы включения, достоинства и недостатки, статические и динамические характеристики.
Существуют следующие варианты реализации датчиков положения(перемещения):
На контактных датчиках
Контактные датчики
(КД) – датчики параметрического типа,
их выходной сигнал (сопротивление)
изменяется при изменении входной
величины – перемещение контактов. Это
датчики дискретного типа (выходной
сигнал принимает 2 значения: R=0
– контакты замкнуты или
![]() – контакты разомкнуты).
– контакты разомкнуты).
Такие датчики широко применяются в системах автоматики для контроля размеров, сортировки контроля перемещения, а также для измерения других величин, с помощью промежуточных преобразований их в перемещение.
Также датчики бывают однопредельные и многопредельные.
Однопредельный КД















Многопредельный кд

здесь контроль по сопротивлению Rрезистора: чем больше контактов замкнуто, темRменьше.
Достоинства:
Простота;
Дешевизна;
Простота регулировки чувствительности;
Возможность работы как на постоянном, так и на переменном.
Недостатки:
Искрение (обгорание, износ);
Вибрация контактов и возможность ложных срабатываний при вибрации;
Дребезг контактов.
На потенциометрических датчиках (ПД)
Потенциометрические датчики предназначены для преобразования перемещения в электрический сигнал.

Основой потенциометрических датчиков является реостат, сопротивление которого изменяется при перемещении движка, скользящего по проволоке.
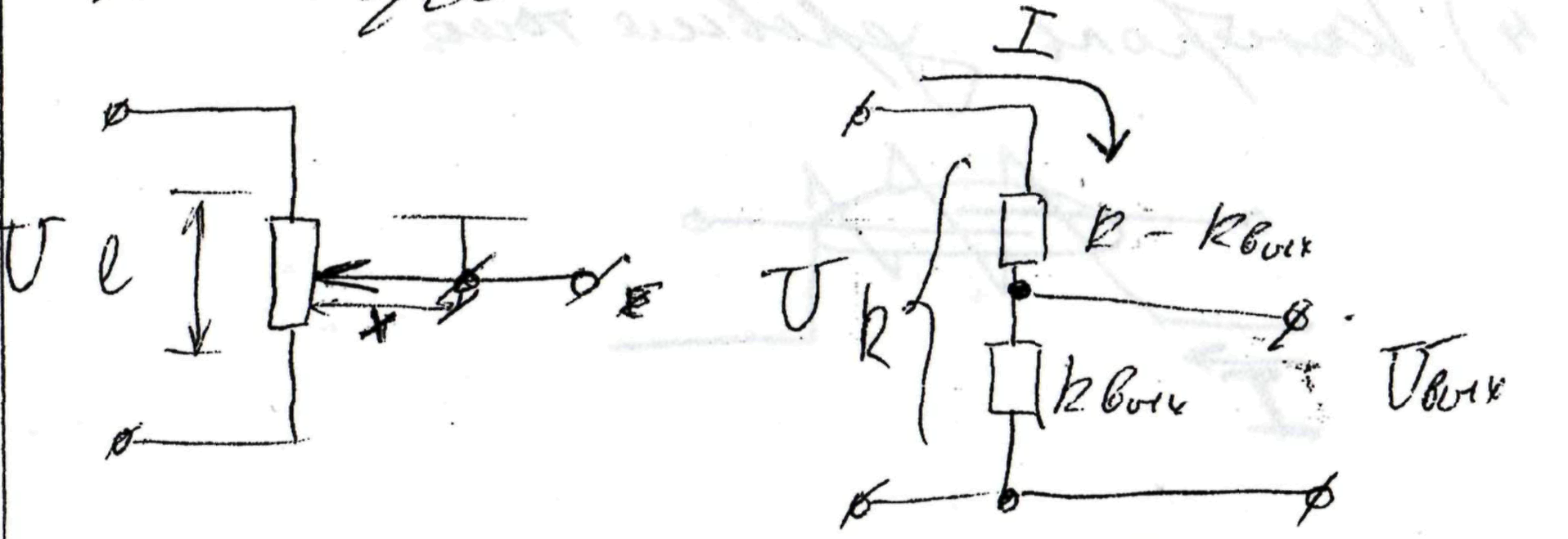
Конструктивно датчик состоит из корпуса, на котором в один слой намотана обмотка из провода. На одном из концов снята изоляция и там скользит движок.
Корпус выполняется
плоским или круглым. Обмотка выполняется
из манганина, нихрома, константа и др.
высокоомных материалов с малым ТКС
(температурный коэффициент сопротивления:
на сколько изменяется
![]() -
удельное сопротивление при изменении
на 1
-
удельное сопротивление при изменении
на 1![]() )
)
Требования к проводу:
Высокоомный провод;
Низкий ТКС;
Механическая прочность.
Диаметр провода обычно составляет сотые или десятые доли миллиметра.
Разновидность пд – реохорды (проволока со скользящим по ней ползунком)

Сопротивление реохордов мало, поэтому они часто включаются в мостовую схему
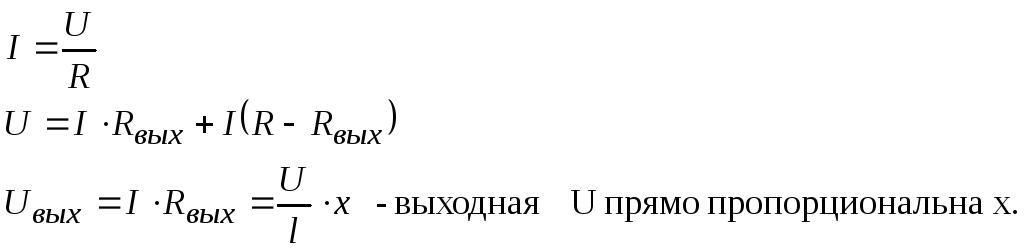
Статические и динамические характеристики ПД

Коэффициент
нагрузки (абсолютное перемещение: от
0 до
![]() ):
):![]()
Относительное
перемещение (коэффициент перемещения)![]()

Максимальное отклонение напряжения под нагрузкой от напряжения на холостом ходу имеет место на положении перемещения 2/3
Для снижения
погрешности датчика от нагрузки следует
по возможности увеличивать ![]() и/или ограничить рабочий участок ПД
диапазоном от 0 до 1/3.
и/или ограничить рабочий участок ПД
диапазоном от 0 до 1/3.
Еще один источник погрешности – это ступенчатость характеристики.
Для уменьшения погрешности необходимо увеличивать число витков, но это приводит к уменьшению диаметра провода, что приводит к уменьшению надежности.
Еще один вид погрешности – неравномерность статической характеристики из-за непостоянства провода по длине обмотки или удельного сопротивления провода
Погрешности от люфта приводят к неоднозначности и нелинейности статической характеристики.
Также существуют погрешность от трения и температурная погрешность.
Динамические характеристики датчика определяются характером его нагрузки. При чисто активной нагрузке датчик представляет собой безинерционное звено. При индуктивно-активной – апериодическое звено 1 порядка.
Достоинства :
Простота конструкции;
Малые габариты и вес;
Принципиальная возможность получения высоколинейных характеристик;
Стабильность характеристики;
Возможность работы на постоянном и переменном токе.
Недостатки:
Относительно низкая надёжность из-за окисления подвижного контакта и перетирание витков;
Ограниченная скорость перемещения;
Низкая рабочая частота на переменном токе;
Наличие электронных шумов.
Индуктивные датчики (ИД).
Относятся к электромагнитным датчикам.
Принцип действия ИД основан на изменении магнитного сопротивления магнитной цепи датчика при перемещении сердечника
Простейший ИД представляет собой дроссель с переменным воздушным зазором.
 Uп Uп
Uп Uп
I I
x
x
![]() RмL
RмL![]() zI
zI
Rм – магнитное сопротивление магнитной цепи.
![]()

![]()
![]() где
где![]() –толщина воздушного
зазора;
–толщина воздушного
зазора;
![]() –магнитная
проницаемость воздуха;
–магнитная
проницаемость воздуха;
![]() –сечение.
–сечение.





Искажение линейной характеристики вблизи точки А определяется ненулевым магнитным сопротивлением стали. Искажение вблизи точки В определяется ненулевым активным сопротивлением датчика.
На участке АВ зависимость тока линейна и описывается выражением
I=K*x
Для больших перемещений применимы ИД в виде катушки с подвижным внутренним сердечником. Такие датчики называются плунжерными ИД. Если сердечник полностью введен внутрь катушки, то ее индуктивное сопротивление максимально, а ток через нее минимален, и наоборот.

x
Трансформаторный датчик
Принцип действия основан на изменении коэффициента взаимоиндукции обмоток при перемещении якоря.
Дифференциальный трансформаторный датчик плунжерного типа

W2``
W1
W2`
x

![]() , если сердечник посередине, то
, если сердечник посередине, то![]() .
.