

Вопрос 19 Коммутационные элементы и контакты реле, средства искро- и дуго-гашения
Контактные узлы делятся на:
замыкающиеся
размыкающиеся
переключающиеся
К

![]() ,
где Rк
– контактное сопративление
,
где Rк
– контактное сопративление
F – сила сжатия контактов
В процессе работы реле контакты изнашиваются:
в разомкнутом состоянии контакты подвержены коррозии из-за химического воздействия окружающей среды;
в замкнутом состоянии контакты подвержены ускоренной коррозии за счет химического воздействия окружающей среды при повышенной температуры;
при коммутации контакты подвержены эрозии под действием искрения и дуг;
Для уменьшения эрозии контактов под воздействием дуги применяются методы дуго-гашения. Существуют 2 основных метода:
ш
 унтирование
индуктивности разрываемой цепи:
унтирование
индуктивности разрываемой цепи:


шунтирование контактов:
Вопрос20.
Электромагнитные реле постоянного тока, принцип действия, тяговая и механическая характеристики, статические и динамические характеристики реле как элементов автоматики.
Статические характеристики элементов автоматики
Наибольший интерес
представляет зависимость выходной
величины элемента автоматики от его
входной величины. Входную
величину
обычно называют входным,
сигналом (будем
обозначать его
через х), а
выходную величину — выходным
сигналом (будем
обозначать его
через у). Режим
работы, при котором входной и выходной
сигналы постоянны
![]() ,
называют статическим
или установившимся режимом. Характеристики,
определяемые в этом режиме, называются
статическими.
,
называют статическим
или установившимся режимом. Характеристики,
определяемые в этом режиме, называются
статическими.
Следует отметить, что для многих электромеханических и магнитных устройств автоматики сигналом является напряжение или сила переменного тока. В статическом режиме постоянным является действующее значение напряжения или тока, хотя мгновенное значение при этом, естественно, изменяется по синусоидальному закону.
Основной характеристикой
всех элементов автоматики является
статический
коэффициент преобразования![]()

Рис. 1.2. Статические характеристики элементов автоматики
Статические
характеристики бывают линейными и
нелинейными (рис. 1.2). Особенно
явно нелинейность выражена
для элементов типа реле. При увеличении
входного сигнала реле
от нуля до некоторого значения, называемого
сигналом срабатывания
![]() выходной
сигнал равен нулю. При
выходной
сигнал равен нулю. При
![]() выходной
сигнал изменяется скачком и при дальнейшем
увеличении входного
сигнала остается постоянным (рис. 1.2,
в).
выходной
сигнал изменяется скачком и при дальнейшем
увеличении входного
сигнала остается постоянным (рис. 1.2,
в).
Выходной сигнал
некоторых элементов равен нулю при
малых значениях
входного сигнала, т. е. эти элементы
нечувствительны к
слабым сигналам. Статическая характеристика
элементов показана
на рис. 1.2, г.
Только при
![]() начинается
изменение выходного
сигнала у. В
этом случае значение х=а
называют
порогом
чувствительности. Диапазон изменения
входного сигнала, при котором
выходной сигнал равен нулю, называется
зоной нечувствительности.
Для элемента, характеристика которого
показана на рис. 1.2,г, зона
нечувствительности равна2а.
начинается
изменение выходного
сигнала у. В
этом случае значение х=а
называют
порогом
чувствительности. Диапазон изменения
входного сигнала, при котором
выходной сигнал равен нулю, называется
зоной нечувствительности.
Для элемента, характеристика которого
показана на рис. 1.2,г, зона
нечувствительности равна2а.
Точность работы
датчика характеризуется погрешностью.
Различают
абсолютную,
относительную и
приведенную
погрешности. При
определении погрешности сравнивают
реальную статическую характеристику
датчика с идеальной линейной статической
характеристикой.
Реальная статическая характеристика
отличается от идеальной,
поскольку выходной сигнал может
изменяться за счет внутренних
свойств элемента (износ, старение и т.
д.) или засчет
изменения внешних факторов (напряжение
питания, температура и т. д.). Абсолютная
погрешность представляет собой разность
между реальным![]() и расчетным (идеальным)
и расчетным (идеальным)![]() выходными
сигналами при одном и том же значении
входного сигнала х.
Абсолютная
погрешность имеет размерность выходной
величины, ее называют еще ошибкой:
выходными
сигналами при одном и том же значении
входного сигнала х.
Абсолютная
погрешность имеет размерность выходной
величины, ее называют еще ошибкой:![]()
Относительная
погрешность представляет собой отношение
абсолютной
погрешности к расчетному значению
выходной величину
и определяется в относительных единицах![]() или в
процентах
или в
процентах![]()
Приведенную погрешность определяют как отношение абсолютной погрешности к диапазону возможных значений выходного сигнала. Приведенную погрешность вычисляют в относительных единицах или в процентах. О точности датчика судят "обычно по максимальной приведенной погрешности.
Динамические характеристики элементов автоматики
Переход системы из одного установившегося режима в другой с иными значениями входного и выходного сигналов называют динамическим режимом или переходным процессом. В динамическом режиме отношение выходного сигнала к входному может быть не равно коэффициенту преобразования. Поведение элемента или системы автоматики в переходном процессе может быть описано с помощью переходных характеристик. Переходной характеристикой называют зависимость выходного сигнала от времени y(t) при скачкообразном изменении входного сигнала. На рис. 1.3 показаны график изменения входного сигнала и соответствующие ему графики переходных характеристик наиболее распространенных элементов автоматики.

Рис. 1.3. Переходные характеристики элементов автоматики
В момент времени
![]() входной сигнал
скачком изменяется от нуля
до
входной сигнал
скачком изменяется от нуля
до
![]() (рис. 1.3, а).
Если элемент
автоматики является безинерционным,
то в тот же момент времени
(рис. 1.3, а).
Если элемент
автоматики является безинерционным,
то в тот же момент времени
![]() выходной
сигнал скачком
изменяется от нуля до
выходной
сигнал скачком
изменяется от нуля до
![]() (рис. 1.3, б). Как правило,
электромеханические элементы обладают
инерционностью, которая
тем больше, чем больше масса подвижных
частей или индуктивность
обмотки. В этом случае изменение выходного
сигнала
запаздывает по сравнению с изменением
входного (рис. 1.3,в).
Переходная
характеристика имеет вид экспоненты,
т. е. кривой, стремящейся
от нуля к значению
(рис. 1.3, б). Как правило,
электромеханические элементы обладают
инерционностью, которая
тем больше, чем больше масса подвижных
частей или индуктивность
обмотки. В этом случае изменение выходного
сигнала
запаздывает по сравнению с изменением
входного (рис. 1.3,в).
Переходная
характеристика имеет вид экспоненты,
т. е. кривой, стремящейся
от нуля к значению![]() со
скоростью, пропорциональной
в каждый момент времени разности между
со
скоростью, пропорциональной
в каждый момент времени разности между![]() и
текущим
значением выходного сигнала. Инерционность
переходного процесса характеризуется
значением постоянной времени Т,
выражаемой
в секундах. На графике величину Т
можно
определить, проведя
касательную к кривой y(t)
при t=to
и продолжив
ее до пересечения
с горизонтальной линией
и
текущим
значением выходного сигнала. Инерционность
переходного процесса характеризуется
значением постоянной времени Т,
выражаемой
в секундах. На графике величину Т
можно
определить, проведя
касательную к кривой y(t)
при t=to
и продолжив
ее до пересечения
с горизонтальной линией
![]() За время, равноеТ,
выходной
сигнал достигает 63% своего нового
установившегося значения.
За время, равноеТ,
выходной
сигнал достигает 63% своего нового
установившегося значения.
Уравнение переходной характеристики имеет следующий вид:
![]()
где![]() —основание
натурального логарифма.
—основание
натурального логарифма.
Обычно на практике
считают, что за время
![]() выходной
сигнал достигает нового установившегося
значения
выходной
сигнал достигает нового установившегося
значения
![]() На самом деле
за это время выходной сигнал
достигает значений
соответственно
На самом деле
за это время выходной сигнал
достигает значений
соответственно
![]() Разницу
между значениями
выходного сигнала в динамическом и
установившемся режимах называют
динамической погрешностью. Для ее
уменьшения стремятся снизить
постоянную времени, например, делая
более легкими
подвижные части элементов автоматики.
Разницу
между значениями
выходного сигнала в динамическом и
установившемся режимах называют
динамической погрешностью. Для ее
уменьшения стремятся снизить
постоянную времени, например, делая
более легкими
подвижные части элементов автоматики.
График колебательного
затухающего переходного процесса
показан на рис. 1.3, г.
Как видно из
этого графика,
изменение выходного сигнала происходит
относительно значения
![]() .
Амплитуда этих колебаний постепенно
уменьшается,затухает.
Для количественной оценки этого процесса
вводят понятие
коэффициента затухания
.
Амплитуда этих колебаний постепенно
уменьшается,затухает.
Для количественной оценки этого процесса
вводят понятие
коэффициента затухания![]() который
определяют по формуле
который
определяют по формуле![]() где
где
![]() и А3
— соседние
амплитуды колебаний выходного
сигнала в одну сторону (т. е. одного
знака).
и А3
— соседние
амплитуды колебаний выходного
сигнала в одну сторону (т. е. одного
знака).
При незатухающем
колебательном процессе
![]() и коэффициент
затухания
и коэффициент
затухания![]() Система
автоматики является при этом неустойчивой.
Если же коэффициент затухания стремится
к единице, то
переходный процесс будет апериодическим
(рис. 1.3, в).
Система
автоматики является при этом неустойчивой.
Если же коэффициент затухания стремится
к единице, то
переходный процесс будет апериодическим
(рис. 1.3, в).
Электромагнитные реле постоянного тока
Устройство электромагнитных реле постоянного тока показано на рис. 17.4: а —с поворотным якорем, б —с втяжным яко-
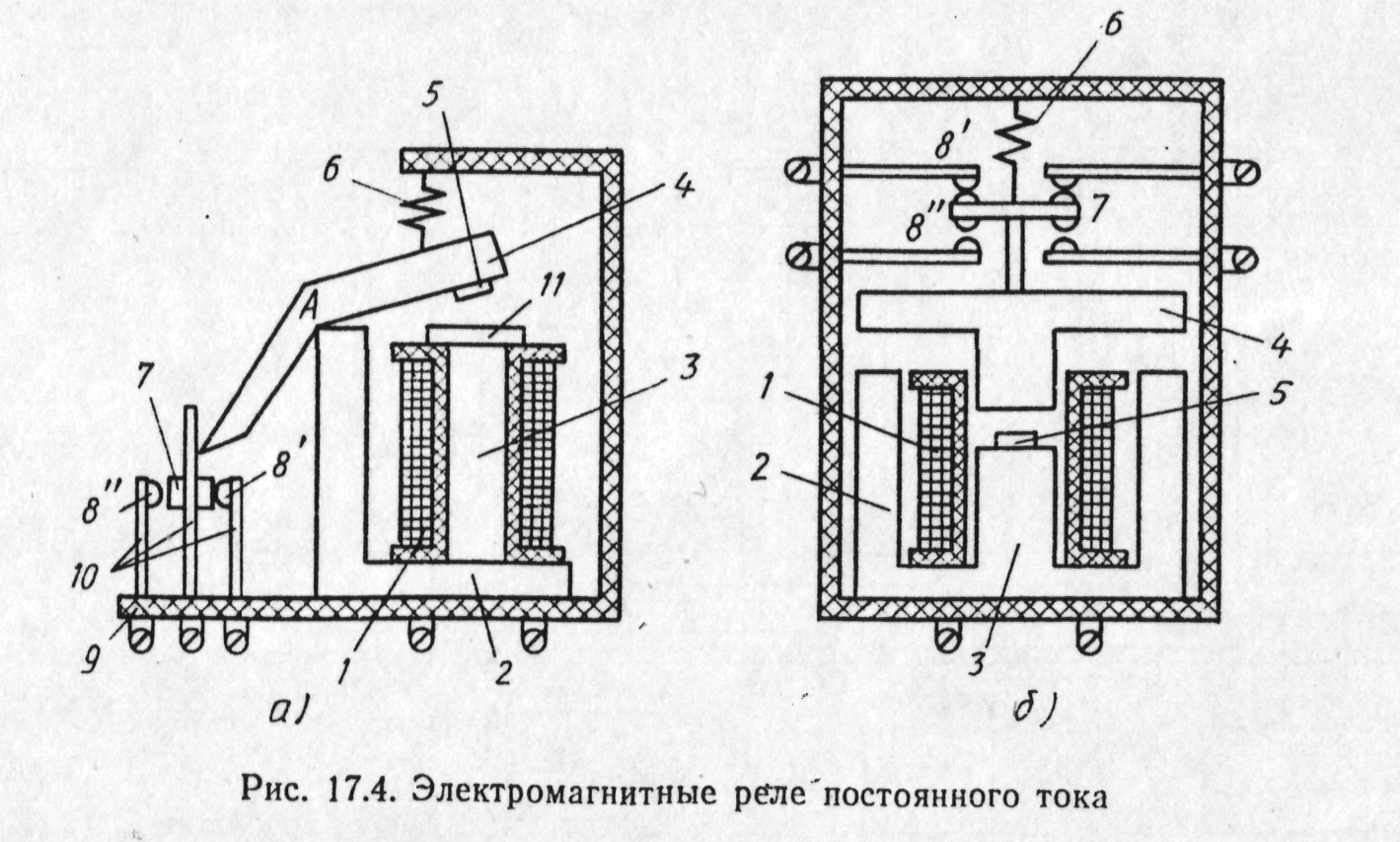
рем. Основные детали и узлы реле имеют следующие обозначения: / — катушка на каркасе; 2 — ярмо; 3 — сердечник; 4 — якорь;
5 — штифт отлипания (немагнитная прокладка); б — возвратная пружина; 7— подвижные контакты; 8 — неподвижные контакты.
Магпитопровод электромагнитного механизма реле состоит из неподвижной и подвижной частей. Подвижная часть называется якорем. Неподвижная часть состоит из сердечника, который находится внутри катушки, и ярма — той части магпитопроиода, которая охватывает катушку.
В реле с поворотным якорем (рис. 17.4, а) электромагнитный механизм и контактный узел закреплены на общем изоляционном основании 9. При протекании тока по обмотке катушки / якорь 4 притягивается к сердечнику 3 и совершает поворот относительно точки опоры А. При этом якорь перемещает подвижный контакт 7, который размыкается с неподвижным контактом 8' и замыкается с неподвижным контактом 8". Контакты закреплены на плоских пружинах 10, которые служат и для подсоединения к внешней цепи. Когда ток через обмотку реле прекращается, якорь поворачивается в исходное положение.
В некоторых реле это происходит под действием силы тяжести якоря, в некоторых — под действием контактных пружин или специальной возвратной пружины 6. Для того чтобы якорь при обссточивапии обмотки не прилипал к сердечнику из-за остаточного намагничивания магпитопровода, па якоре устанавливается штифт отлипания 5 — пластинка из немагнитного материала, обеспечивающая зазор примерно в 0,1 мм между якорем и сердечником при срабатывании реле. Обычно сердечник имеет полюсный наконечник 11 для уменьшения магнитного сопротивления рабочего воздушного зазора.
В электромагнитном реле с втяжным якорем (рис. 17.4, б) при протекании тока по обмотке катушки 1 якорь 4 втягивается внутрь ее до упора в сердечник 3. При этом подвижные мостиковые контакты 7 размыкаются с неподвижными контактами 8' и замыкаются с неподвижными контактами 8". Возврат якоря 4 в исходное положение при обесточивании реле происходит под действием возвратной пружины 6. Как и в реле с поворотным якорем, для исключения залипания якоря служит штифт 5. Для возврата якоря в исходное положение может использоваться и сила тяжести якоря.
Последовательность работы электромагнитного реле, тяговая и механическая характеристики элмаг реле
Рассмотрим последовательность работы электромагнитного реле с момента подачи напряжения на обмотку реле до момента снятия напряжения с обмотки и возвращения якоря в исходное положение. Поскольку обмотка реле имеет индуктивное сопротивление, ток в ней не может измениться скачком. Изменение тока щадь Оbф на рис. 17.6, а), и энергии, распределенной в стальных частях магнитопровода (заштрихованная площадь Оаb на рис. 17.6, а). Магнитопровод реле обычно не насыщен, т. е. работа реле происходит на прямолинейном участке кривой намагничивания.
П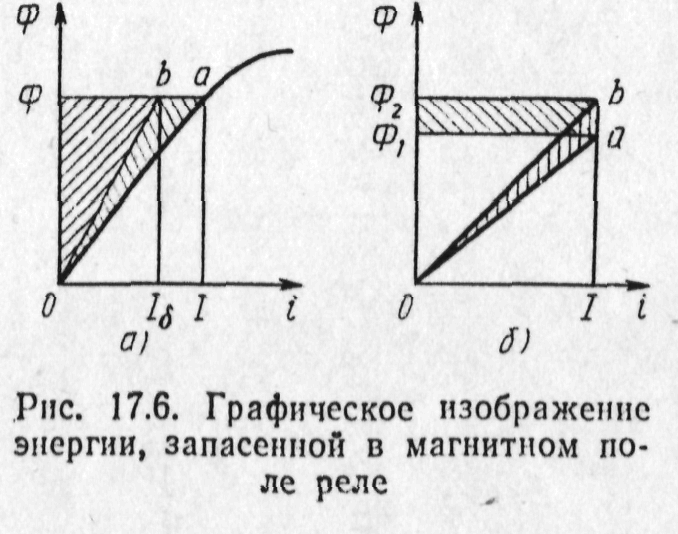 оскольку
воздушный зазор имеет сравнительно
большую величину, можно пренебречь
второй частью энергии (площадьюOab).
Магнитную энергию,
запасенную в воздушном зазоре, приближенно
определяем как площадь всего треугольника
ОаФ:
оскольку
воздушный зазор имеет сравнительно
большую величину, можно пренебречь
второй частью энергии (площадьюOab).
Магнитную энергию,
запасенную в воздушном зазоре, приближенно
определяем как площадь всего треугольника
ОаФ:
Wb=Iw Ф/2. (17.4)
Теперь рассмотрим процесс, изменения энергии магнитного поля при перемещении якоря, полагая ток в обмотке реле неизт мепным: I = const. При перемещении якоря уменьшается зазор, а магнитный поток увеличивается от Ф1 до Ф2. Следовательно, изменение энергии AW можно
приближенно определить как площадь прямоугольника Ф,аbф2 на рис. 17.6, б:
![]()
До начала движения якоря энергия поля определялась площадью треугольника ОаФ1, после перемещения якоря на б энергия поля определялась площадью треугольника ОbФ2. Разница этих площадей и даст нам изменение магнитной энергии в воздушном зазоре:
![]()
Изменение энергии AW по уравнению (17.5) произошло за счет поступления энергии из сети. Половина ее, как видно из уравнения (17.6), пошла на изменение энергии в воздушном зазоре. Куда же была израсходована вторая половина энергии AW, численно примерно равная AWb?
Эта вторая половина энергии (на рис. 17.6, б она соответствует площади треугольника Oab) расходуется на создание механической работы Aмех при перемещении якоря под действием электромагнитной силы Fa:
![]()
Подставляя в (17.7) выражение (17.6), получим

Магнитный поток в воздушном зазоре создается за счет магнитодвижущей силы (МДС) (/w) в и пропорционален магнитной проводимости зазора Ge.
Так как мы приняли /=const,
то и МДС (/w)
= const,
а изменение потока
![]() Ф
= Ф2—Ф1
происходит за счет изменения проводимости
воздушного зазора G
Ф
= Ф2—Ф1
происходит за счет изменения проводимости
воздушного зазора G![]() :
:

Для воздушного зазора длиной
б между двумя плоскостями, площадь
сечения которых s![]() ,
магнитная проводимость определяется
по формуле
,
магнитная проводимость определяется
по формуле
![]()
Подставляя (17.11) и значение
![]() 0
в (17.10), получим
электромагнитную силу при изменении
зазора от
0
в (17.10), получим
электромагнитную силу при изменении
зазора от
![]() до нуля:
до нуля:
![]()
Эту формулу можно преобразовать, учитывая что
![]()

Из (17.12) следует, что
электромагнитное тяговое усилие прямо
пропорционально квадрату МДС, т. е. не
зависит от направления тока в обмотке
реле. Эта сила тяги обратно пропорциональна
квадрату длины б воздушного зазора.
Тяговая характеристика Fa—f(![]() )
показана на рис. 17.7.
В зоне малых зазоров реальная тяговая
характеристика отличается от
теоретической, построенной по (17.12), —
штриховая кривая на рис. 17.7. Напомним,
что мы выводили уравнение силы тяги,
приняв некоторые допущения. При малых
зазорах необходимо учитывать магнитное
сопротивление стальных участков
магнитопровода, которыми мы
пренебрегли.
)
показана на рис. 17.7.
В зоне малых зазоров реальная тяговая
характеристика отличается от
теоретической, построенной по (17.12), —
штриховая кривая на рис. 17.7. Напомним,
что мы выводили уравнение силы тяги,
приняв некоторые допущения. При малых
зазорах необходимо учитывать магнитное
сопротивление стальных участков
магнитопровода, которыми мы
пренебрегли.
Рассмотрим теперь механическую характеристику реле. Перемещению якоря реле в направлении сердечника противодействуют силы упругих элементов. Такими упругими элементами являются возвратная и контактная пружины.
Подвижный контакт реле обычно размещается на плоской пружине, представляющей собой упругую металлическую пластину, один конец которой жестко закреплен, а другой может перемещаться (см., например, контакт 6 на рис. 17.2). Противодействующая сила, развиваемая плоской пружиной, определяется по формуле
![]()
где E —модуль упругости материала пружины; I=bh3/12 — момент инерции пружины; b — ширина; h — толщина пружины; I — расстояние от места закрепления пружины до точки приложения силы; х — перемещение пружины в точке приложения силы.
В![]()
 исходном состоянии пружина не
деформирована, сила равна нулю. Перемещение
пружиных при
срабатывании реле будет происходить в
направлении уменьшения зазора, поэтому
зависимость Fь{
исходном состоянии пружина не
деформирована, сила равна нулю. Перемещение
пружиных при
срабатывании реле будет происходить в
направлении уменьшения зазора, поэтому
зависимость Fь{![]() )имеет вид
)имеет вид
(17.15)
В качестве возвратных обычно используются, витые пружины. Зависимость усилия, развиваемого винтовой пружиной, от перемещения имеет вид, аналогичный уравнению (17.15):
![]() (17.16)
(17.16)
где G — модуль упругости при сдвиге; J — момент инерции при кручении; г — радиус витка пружины; n —число витков; Fnar— сила предварительного натяга пружины.
Графики зависимости противодействующих сил пружин имеют вид прямых линий, поскольку эти силы пропорциональны деформации (перемещению) пружины.
Рассмотрим построение
механической характеристики реле на
примере контактной группы, показанной
на рис. 17.8, а. При
срабатывании реле якорь 1
сначала преодолевает
натяжение винтовой пружины 4,
затем, когда конец
рычага доходит до контактной пластины
2, добавляется
усилие от ее деформации, а когда контакт
пластины 2 замыкается
с контактом пластины 3,
добавляется и усилие
от деформации этой пластины 3.
Механическая
характеристика Fм=f(![]() )
показана на рис. 17.8,6. В исходном состоянии
на якорь действует лишь начальное усилие
Fнач
— предварительный натяг пружины 4.
)
показана на рис. 17.8,6. В исходном состоянии
на якорь действует лишь начальное усилие
Fнач
— предварительный натяг пружины 4.
При изменении зазора о на 6i будет холостой ход рычага якоря до соприкосновения с пластиной 2, противодействующая сила возрастает пропорционально деформации винтовой пружины 4 (участок ab).
Затем наклон прямой резко
возрастает, поскольку началась деформация
пластины 2 (участок
be).
Такой наклон сохраняется
приизменении зазора
![]() на
на
![]() 2
— холостой ход пластины 2
до соприкосновения
с пластиной 3. Затем
наклон прямой еще возрастает, поскольку
началась деформация пластины 3
(участок cd).
Рост противодействующего
усилия прекращается, когда якорь
полностью притянется к сердечнику.
Величина зазора при этом равна толщине
штифта отлипания
2
— холостой ход пластины 2
до соприкосновения
с пластиной 3. Затем
наклон прямой еще возрастает, поскольку
началась деформация пластины 3
(участок cd).
Рост противодействующего
усилия прекращается, когда якорь
полностью притянется к сердечнику.
Величина зазора при этом равна толщине
штифта отлипания
![]() о-
Из построения видно, что механическая
характеристика имеет вид ломаной
линии, где каждый отрезок характеризует
работу какой-либо группы пружин.
о-
Из построения видно, что механическая
характеристика имеет вид ломаной
линии, где каждый отрезок характеризует
работу какой-либо группы пружин.
В том случае, когда все пружины, создающие
противодействующее усилие в контактной
группе реле, имеют начальное натяжение,
переход с одного от-резка на другой
происходит скачком (в точкахb
и с на рис. 17.8,
в).
том случае, когда все пружины, создающие
противодействующее усилие в контактной
группе реле, имеют начальное натяжение,
переход с одного от-резка на другой
происходит скачком (в точкахb
и с на рис. 17.8,
в).
Для работы реле необходимо, чтобы тяговая и механическая характеристики были согласованы. Для срабатывания реле необходимо, чтобы тяговая характеристика, соответствующая току срабатывания, везде находилась выше механической характеристики. При начальном зазоре эти характеристики имеют общую точку (точка А па рис. 19.9). Для отпускания реле необходимо, чтобы тяговая характеристика, соответствующая току отпускания, везде находилась ниже механической характеристики. При минимальном зазоре эти характеристики могут иметь общую точку (точка Б на рис. 17.9).