

Двигатели параллельного возбуждения
М
![]()
![]()
P2 – мощность на валу двигателя
n – частота вращения
U=const – напряжение питания
с – температурный коэффициент
Рабочие характеристики:



![]()

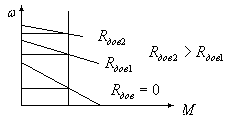
Естественная механическая характеристика двигателя
(Rd – добавочное сопротивление, Rd1<Rd2)
Жесткость характеристики отображает, на сколько меняется частота вращения двигателя при увеличении момента сопротивления на его валу.
Если частота равна const при изменении его момента, то такая характеристика называется абсолютно жесткой.
наиболее распространенный способ регулирования скорости двигателя заключается во введении добавочных сопротивлений последовательно с якорем двигателя (уменьшение скорости).
регулирование со стороны ОВ: добавочные резисторы включаются последовательно с ОВ, за счет этого уменьшится поток Ф, а частота вращения увеличится (увеличение скорости).
изменение напряжения питания (используется при малых изменениях напряжения -100..+100)

Двигатели последовательного возбуждения
I в=Iя
=> Ф не const
в=Iя
=> Ф не const
М=кIяФ
![]()
«+» : меньше потребляется тока
![]()
Холостой ход:М=0, Iя=Iв=0, => Ф=0, => n=бесконечности
Рабочие (рис.1) и механические хар-ки (рис. 2): Rd=0-естеств.хар-ка, ост.-искусств.хар-ки.


Двигатель смешанного возбуждения
С

рабочие характеристики практически идентичны
м
еханические характеристики:
параллельное вкл.
смешанное
последовательное
Вопрос 12. Якорное и полюсное управление двигателями постоянного тока: характеристики и способы реализации
Якорное и полюсное управление дпт


Двигатель независимого возбуждения – это наиболее часто применяемый в САУ двигатель. Наиболее часто применяемые двигатели малой мощности (от долей Вт до сотен Вт).
Достоинства:
- хорошая регулировочная характеристика
- линейность механической характеристики
- большой пусковой момент
- высокое быстродействие
- малые габариты и масса;
Недостатки:
- наличие скользящего контакта между щеткой и коллектором, и следствие этого – искрение;
- малый срок службы щеточно-коллекторного узла
- радиопомехи;
Основные характеристики:
- рабочие
- механические (зависимость момента от частоты вращения);
![]() ;
;
![]() ;
;![]() ;
;![]() ;
;
![]() -
доля
напряжения, которая расходуется на
якорь для создания потока;
-
доля
напряжения, которая расходуется на
якорь для создания потока;
![]() ;
;

![]()
Специальные режимы работы двигателя:

Если в процессе работы двигателя отключить якорную обмотку от источника питания и замкнуть ее на внешнее устройство, то двигатель перейдет в режим динамического торможения. Помимо динамического торможения применяется торможение противовключения – самый быстрый и эффективный способ. В этом режиме изменяется полярность напряжения питания. Поскольку, двигатель в режиме торможения противовключения потребляет большой тормозящий ток, торможение на естественной характеристике осуществляется редко, чаще осуществляется на искусственной характеристике.
Под управляемым
двигателем понимают изменение частоты
вращения
![]() ,
в соответствии с поступающим от САУ
сигналом. Управлять двигателем
независимого возбуждения можно либо
по цепи якоря (Якорное управление)
,
в соответствии с поступающим от САУ
сигналом. Управлять двигателем
независимого возбуждения можно либо
по цепи якоря (Якорное управление)
либо по цепи обмотки возбуждения (полюсное управление). В свою очередь и якорное и полюсное управление можно реализовать либо меняя ток за счет введения добавочных резисторов либо меняя напряжение питания.

Особенности:
- регулирование осуществляется только вниз;
- регулирование
осуществляется под нагрузкой (чем
больше![]() ,
тем меньше стабильность );
,
тем меньше стабильность );
- за счет снижения характеристик существенно большая чувствительность двигателя к изменению момента.
Якорное управление изменения напряжения питания:

![]()
![]()
регулирование за счет частоты и вверх и вниз;
не меняется жесткость характеристики;
возможно регулировать как нагрузкой, так и напряжением питания.
Полюсное управление:
регулировка частоты осуществляется вверх;
жесткость улучшается;
степень регулируемости зависит от момента.
Автоматизация пуска:
Самый распространенный вариант не прямого пуска двигателя – это пуск на искусственных характеристиках.


Варианты формирования коммутаций:
коммутация функций частоты вращения ( недостаток – необходимо механическое подключение датчика );
коммутация функций потребляемого тока (недостаток – включение в схему электрического датчика);
коммутация функций времени (достоинство – не надо датчиков, недостаток – менее точен).