

Сигнальные уровни на can-шине.
LON
Коммуникационная технология LON (протокол LONTalk) была разработана американской компанией "Echelon" для создания систем автоматизации жизнеобеспечения жилых и промышленных зданий. В основе LON-технологии лежит использование специального интерфейсного Neuron-кристалла. Этот однокорпусный кристалл содержит 3 микропроцессора для обработки уровней 1-6 OSI модели. LON-сеть может состоять из сегментов с различными физическими средами передачи: витая пара, радиочастотный канал, инфракрасный канал, линии напряжения, коаксиальный и оптический кабели. Для каждого типа физического канала существуют трансиверы, обеспечивающие работу сети на различных по длине каналах, скоростях передачи и сетевых топологиях. Максимальная размерность LON-сети на основе LON - 32000 узлов, соединенных различными физическими средами в произвольной сетевой конфигурации.
PROFIBUS
Данная технология связи строится на совокупности трех отдельных протоколов: PROFIBUS-FMS, PROFIBUS-DP и PROFIBUS-PA, каждый из которых имеет свою область применения на различных уровнях распределенной системы автоматизации. Общее продвижение PROFIBUS ведет ассоциация PNO. PROFIBUS было разработано фирмой Siemens в начале 90_х годов. На нижнем уровне применяется сеть PROFIBUS_DP, обеспечивающая высокоскоростной обмен данными с оконечными устройствами. Протокол физического уровня соответствует стандарту RS_485. Скорость обмена прямо зависит от длины сетевого сегмента и варьируется от 100 кбит/с на расстоянии 1200 метров до 12 Мбит/с на дистанции до 100 метров. Взаимодействие узлов в сети PROFIBUS определяется моделью «Master_slave». Master сегмента последовательно опрашивает подключенные узлы и выдает команды в соответствии с заложенной в него технологической программой. Протокол обмена данными гарантирует определенное время цикла опроса в зависимости от скорости обмена и числа узлов в сегменте, что позволяет применять PROFIBUS в системах реального времени. На более высоком уровне применяется сеть PROFIBUS-FMS, ориентированная на обеспечение информационного обмена одноранговых устройств. Во взрывоопасных зонах используется PROFIBUS_PA, основанная на стандарте физического уровня IEC 61158_2. Сегмент PROFIBUS_PA может иметь длину до 1900 метров со скоростью обмена между узлами 31,25 кбит/с. Применяемый кабель — Belden 3077. Сегменты PROFIBUS_PA подключаются к PROFIBUS-DP через разделительные мосты, обеспечивающие функционирование ЦПС во взрывоопасной зоне.
FOUNDATION FIELDBUS
Спецификация разрабатывается ассоциацией Foundation Fieldbus. Несмотря на чрезвычайно широкую известность и раскрученность, найти какие - либо подробные материалы очень сложно. Параметры: скорость передачи 31.25 кбит/сек; длина сети - до 2000 м; топология сети - шина; кабель - витая пара; Кол-во узлов - 240/сегмент, 65535 сегментов всего; Основные особенности: · логическая организация сети позволяет узлам организовывать одно-ранговое взаимодействие; · каждому типу узла может быть создан профиль устройства с полным описанием всех функциональных особенностей, что позволяет использовать такие приборы в существующей сети без разработки специального ПО. В отличие от других промышленных сетей, Foundation Fieldbus ориентирована на обеспечение одноранговой связи между узлами без центрального ведущего устройства. Этот подход даёт возможность реализовать системы управления, распределенные не только физически, но и логически, что во многих случаях позволяет повысить надежность и живучесть АСУ ТП. В Foundation Fieldbus реализованы самые сложные технологии обмена информацией: подписка на данные, режим «клиент_сервер», синхронизация распределенного процесса и т.д.
INTERBUS
Одной из ведущих технологий в области организации промышленной связи на уровне датчиков по праву считается Interbus-технология. Все данные, передаваемые в этой системе, делятся на два основных типа: данные о процессе и параметрические данные. Interbus использует процедуру доступа к шине по схеме "ведущий/ведомый" (Master/Slave). При этом шинный Мастер обеспечивает одновременный интерфейс к высокоуровневой управляющей системе и выполняет функции управления шиной. Топология Interbus - это физическое и логическое кольцо, для реализации которого используются две витые пары (для режима дуплекс) плюс дополнительный провод для передачи сигнала "логическая земля". Такая физическая организация позволяет организовать сеть, работающую на скорости 500 Кбит/с на расстоянии 400м между двумя соседними узлами сети. Включенная в каждое сетевое устройство функция повторителя сигнала позволяет расширить систему до 13 км. Поддержка Interbus-технологии ведется со стороны ассоциации "INTERBUS Club".
Спецификация разработана и поддерживается Phoenix Contact. В основе топологии Interbus лежит кольцевая система, то есть все устройства активно интегрированы в замкнутый передаточный контур. Каждый узел усиливает принимаемый сигнал и передает дальше, что позволяет использовать высокие скорости передачи данных на большие расстояния. Система master/slave Interbus позволяет объединять до 512 устройств в 16 подсетях. · Топология: активное кольцо · Master/slave, пакеты фиксированной длины, предопределенная · Все узлы на кольце являются повторителями · Скорость передачи: 500 kbps · Максимум 4096 точек ввода вывода · Длина сети - 400м · Общая длина между двумя удаленными узлами до 13 км
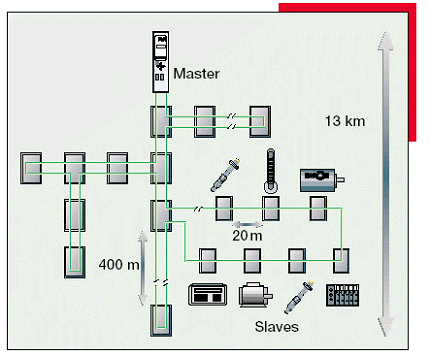
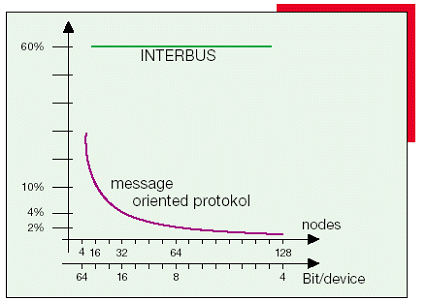
Физическое кольцо и характериситки производительности INTERBUS.
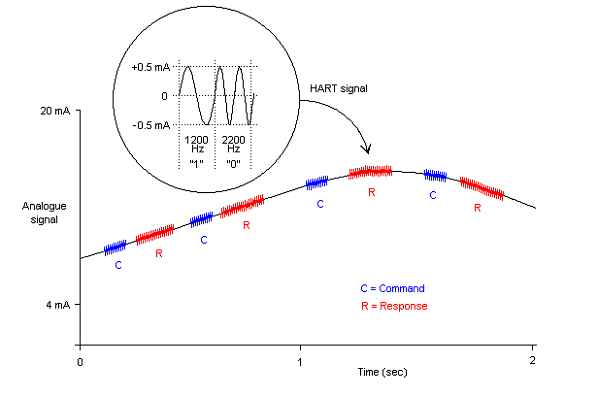
Передача аналогового и цифрового сигнала по одному каналу связи в HART.
HART
Основное назначение HART организация цифрового обмена с приборами подключенными с помощью аналоговых (4-20мА) линий. Принцип функционирования показан на рисунке. Возможно как одноточечное подключение master-slave, так и многоточечное. Скорость - 2-3 обмена данными в секунду. Кабель: Требования в общем как к линиям 4-20мА. Отдельно экранированная витая пара является наиболее предпочтительным вариантом.
ASI
AS-интерфейс (Actuator/Sensor Interface) был представлен в виде концепции в 1993 году. Поддерживается консорциумом ведущих производителей средств АСУ ТП, в числе которых фирмы Siemens, Pepperl+Fuchs и другие. Относится к классу ПС оконечных устройств, осуществляя непосредственную интеграwию датчиков и исполнительных механизмов в систему автоматизации. Позволяет полностью исключить из АСУ ТП аналоговые линии связи, кроссировочные шкафы и другое вспомога тельное оборудование. Максимальное время цикла опроса составляет 5-10 мс, то есть сравнимо с циклом отработки программы в контроллере. Благодаря этому сети на базе AS_интерфейса активно применяются в распределенных АСУ ТП реального времени, например в системах управления конвейерными производствами. Первоначально AS_интерфейс был ориентирован на работу исключительно с бинарными данными, поэтому длина информационной посылки рекордно малая — всего 4 бита! Тем не менее новая редакция спецификации AS_интерфейса позволяет подключать к сети аналоговые датчики и поворотные шифраторы. Максимальное количество узлов равно 62, максимальная длина с использованием повторителей — 300 м. Данные и питающее напряжение передаются по одной паре проводов. Сети на базе AS_интерфейса отличаются экономичностью и очень большим выбором средств комплексирования с другими ПС.
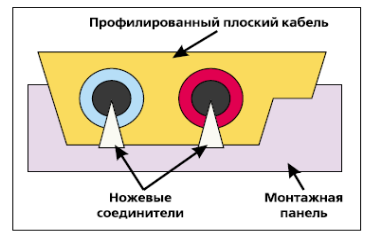
Поперечный разрез AS-кабеля.

Схема подключения устройств по ASI.
Сравнительные характеристики промышленных сетей.
|
Протокол |
Страна |
Среда передачи |
Число узлов |
Скорость передачи данных, кбод |
Длина линий |
Топология сети |
Принцип доступа к сети |
Год рождения |
Примечания |
|
MODBUS |
США |
не специф. |
1 master, до 247 slaves |
0,6-19,2 |
15 м — RS232C ; 1200 м — RS422; 1000 м — т. петля |
звезда; шина |
MASTER/ SLAVE/ TOKEN |
1985 |
был разработан для сбора данных контроллерами Modicon. Физический уровень - RS-232C |
|
BITBUS |
США |
витая пара, радиоканал, оптопара |
28 синхр.; 250 самост. |
500-1400 (синхр.), 64-375 (самосинхр.) |
30м (синхр.); до 1200 м (самосинхр.) |
шина |
MASTER/ SLAVE |
1984 |
INTEL, 1983 u Не зависит от типа интерфейса |
|
CANBUS |
Германия |
витая пара |
до 30 |
50-1000 |
до 1 км — 20 кбод; до 40 м — 1 Мбод |
шина |
произвольн. доступ по приорит. (CSMA/ CM) |
1988 |
CAN (Controller Area Network) Bosch, начало 90-х |
|
LonWorks |
США |
витая пара, коаксиал, оптокабель, радиоканал |
до 127 |
4,88-1250 |
до 2 км |
произвольн. топология |
произвольн. доступ (CSMA/CD) |
1987 |
Используют интерфейсный Neuron-кристалл (2 вида) |
|
PROFIBUS |
Германия |
витая пара, оптокабель |
до 126 |
500-1500 (FMS); 1500-12000 (DP); 31 (РА) |
1200 м; 4800 м с повт.; до 23 км оптокабель |
звезда; шина |
MASTER/ SLAVE/ TOKEN |
1986 |
Передача больших объемов информации (FMS) Увелич. произв-ть для задач РВ, обмен данными с оконечными устройствами (DP) Работа в опасных производствах (PA) |
|
FOUNDATION FIELDBUS |
|
|
240 на сегмент 65535 сегментов |
31,25 |
2 км |
шина |
Client/Server |
1995 год |
|
|
INTERBUS-S |
Германия |
витая пара, коакс. кабель, оптокабель, телеф. канал |
до 512 |
500 |
400 м между узлами 13 км |
кольцо |
Master/Slave |
1984 |
Phoenix Contact в 1984 ретрансляция сигнала в каждом узле |
|
HART |
США |
витая пара, выделенный тел. канал |
до 15 |
1200 |
до 3 км |
звезда |
MASTER/ SLAVE |
1986 |
Возможна передача по одному каналу с аналоговым сигналом из-за примененного частотного метода кодирования. |
|
ASI |
США |
витая пара ASI-кабель |
до 32 |
до 167 |
до 1000 м |
шина, звезда, дерево, кольцо |
MASTER/ SLAVE |
1989 |
ASI (Actuator/Sensor Interface) привод/датчик, 1989-1993 г. Данные и питающее напряжение подаются по одной паре проводов |
Лекция 22
Программируемые логические контроллеры и модуи УСО
Контроллер (англ. controller - регулятор, управляющее устройство) — электрический прибор, с помощью которого в системах управления измеряют токи, напряжения, температуру и другие физические параметры объекта, передают и принимают данные по каналам связи, передают на объект управляющие воздействия, используют в качестве локального автоматического регулятора.
Необходимость использования контроллеров назрела в начале 1960-х. Когда промышленность начала предъявлять высокие требования к эффективному использованию производственных мощностей, а существующие решения на основе релейно-контактных схем не могли обеспечить гибкое и эффективное управление технологическими процессами, так как изменение технологических циклов требовало замены большого числа элементов управления и контроля. Громоздкость и ограниченный срок службы реле требовал создания сложных систем контроля, а поиск неисправности среди 1000 реле требовал содержания большого числа специалистов. Создание промышленных контроллеров позволило объединить сотни - тысячи реле, таймеров, счетчиков в единый и компактный модуль. Возможность перепрограммирования позволила предприятиям быстро перестраивать производство в соответствии с требованиями рынка.
В настоящее время контроллеры — достаточно малогабаритные устройства, поэтому часто встречается название микроконтроллеры. Как правило, контроллеры оснащены микропроцессорной начинкой, позволяющей программировать контроллер на решение заданного круга задач, отсюда другие названия: программируемые контроллеры и программируемые логические контроллеры, которые обычно сокращают до ПЛК в русских описаниях и PLC в английских. Современный контроллер может обладать достаточно мощным процессором, класса Pentium, обычно с небольшим энергопотреблением. Также промышленные контроллеры имеют внешние интерфейсы для соединения в системы сбора и передачи данных.
Контроллеры могут быть специализированными, рассчитанными на эффективное решение определённой задачи (например, контроллер релейной защиты) или универсальными, которые могут решать разноплановые задачи в соответствии с установленным набором блоков и вариантом программного обеспечения — например, задачу съёма показаний с приборов учета.
Типичным примером программируемого логического контроллера является контроллер SIMATIC S7-300 фирмы SIEMENS (Германия). Это модульный программируемый контроллер, предназначенный для построения систем автоматизации низкой и средней степени сложности. Контроллеры SIMATIC S7-300 могут включать в свой состав:
-
Модуль центрального процессора. В зависимости от степени сложности решаемой задачи в контроллерах могут быть использованы различные типы центральных процессоров, отличающихся производительностью, объемом памяти, наличием или отсутствием встроенных входов-выходов и специальных функций, количеством и видом встроенных коммуникационных интерфейсов и т.д.
-
Модули блоков питания (PS), обеспечивающие возможность питания контроллера от сети переменного тока напряжением 120/230В или от источника постоянного тока напряжением 24/48/60/110В.
-
Сигнальные модули (SM), предназначенные для ввода-вывода дискретных и аналоговых сигналов с различными электрическими и временными параметрами.
-
Коммуникационные процессоры (CP) для подключения к сетям PROFIBUS, Industrial Ethernet, ASInterface или организации связи по PtP (point to point) интерфейсу.
-
Функциональные модули (FM), способные самостоятельно решать задачи автоматического регулирования, позиционирования, обработки сигналов. Функциональные модули снабжены встроенным микропроцессором и способны выполнять возложенные на них функции даже в случае отказа центрального процессора ПЛК.
-
Интерфейсные модули (IM), обеспечивающие возможность подключения к базовому блоку (стойка с CPU) стоек расширения ввода-вывода.
Контроллеры SIMATIC S7-300 позволяют использовать в своем составе до 32 сигнальных и функциональных модулей, а также коммуникационных процессоров, распределенных по 4 монтажным стойкам. Все модули работают с естественным охлаждением.
