

Ввод/вывод. Переходы
Чтение из порта (INP) Этот блок считывает один байт данных из порта ввода/вывода, адрес которого задается входом ADDR. Считанное значение присваивается выходу Q.
Чтение слова из порта (INPW) Этот блок считывает слово данных из порта ввода/вывода, адрес которого задается входом ADDR. Считанное значение присваивается выходу Q.
Запись в порт (OUTP) Этот блок посылает в порт ввода/вывода один байт данных. На вход INP подается посылаемое значение, на вход ADDR – адрес порта.
Запись слова в порт (OUTPW) Этот блок посылает в порт ввода/вывода слово данных. На вход INP подается посылаемое значение, на вход ADDR – адрес порта.
Выход из программы (EXIT) Данный блок позволяет выйти из программы до пересчета всех ее функциональных блоков. Выход производится при наличии ненулевого значения на входе INP.
Пересылка значения (MOVE) X(выход) = X(вход).
Пересылка четырех значений (MOVE4) A(выход) = A(вход); B(выход) = B(вход); C(выход) = C(вход); D(выход) = D(вход).
Регулирование
Звено PID (PID) Этот блок формирует выходное значение по ПИД-закону от величины, поданной на вход INP. Для ограничения величины управляющего воздействия используются входы блока MIN и MAX. Если величина управления меньше MIN, то Q = MIN, если величина управления больше MAX, то Q = MAX, при этом в обоих случаях накопление интегральной составляющей закона регулирования прекращается. Данный блок вычисляет величину управляющего воздействия по значению рассогласования регулируемой величины и задания, которое предварительно надо вычислять с помощью блока X-Y.
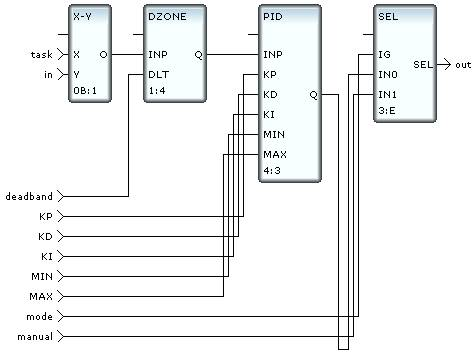
Пример. На рисунке показана программа, реализующая контур регулирования по ПИД-закону. Блок X-Y вычисляет рассогласование регулируемой величины (Y) с заданием (X). Величина рассогласования подается на вход INP блока DZONE, который реализует функцию зоны нечувствительности. Зона нечувствительности определяется значением входа DLT. С выхода блока DZONE сигнал подается на вход INP блока PID, вычисляющего величину управляющего воздействия. Для переключения контура на ручной режим используется блок SEL (вход IG). На вход IN0 блока SEL подается сигнал с выхода блока PID, а на вход IN1 - величина ручного управления выходом регулятора.
Звено PDD (PDD) Этот блок формирует выходное значение по ПДД-закону от значения входа INP. Данный блок вычисляет величину управляющего воздействия по значению рассогласования регулируемой величины и задания, которое предварительно надо вычислять с помощью блока X-Y.
Трехпозиционный регулятор (PREG) Блок работает по следующему алгоритму. Пока INP не выходит за границы диапазона [MIN, MAX], QL = QH = 0. Если INP > MAX, выход QL принимает значение 1, которое сбрасывается в 0 только после того, как INP станет меньше (MAX - DLT). Аналогично, если INP < MIN, выход QH принимает значение 1, которое сбрасывается в 0 только после того, как INP станет больше (MIN + DLT).
Модель объекта (OBJ) Данный блок моделирует объект управления для отладки алгоритмов регулирования или подготовки демонстрационных проектов. Он представляет собой комбинацию апериодического (инерционного) звена первого порядка и звена запаздывания, т.е. передаточная функция блока имеет вид:
![]()
где k и T – соответственно коэффициент усиления и постоянная времени инерционного звена первого порядка, τ > 0 – время запаздывания. Кроме того, на выходной сигнал блока можно наложить помеху в виде случайной составляющей, синусоидального сигнала или случайных бросков. Здесь же можно задать случайное колебание динамических характеристик объекта. Входным по отношению к моделируемому объекту является вход INP. Входы K, T и N используются для задания соответственно коэффициента усиления, постоянной времени и времени запаздывания. Последние два параметра задаются в тактах пересчета, максимальное значение времени запаздывания – 4. Вход SNS предназначен для управления случайными помехами, вносимыми в работу объекта. Значение 1 отдельных битов этого входа включает следующие помехи: 1 бит – добавление к выходному сигналу случайной величины в диапазоне от 0 до 1%; 2 бит – формирование пика величиной 25% от значения выхода с вероятностью 0,01; 3 бит – добавление к выходу синусоидального сигнала с амплитудой 2% от значения выхода; 5 бит – случайное увеличение коэффициента усиления в диапазоне от 0 до 2%; 6 бит – случайное увеличение постоянной времени в диапазоне от 0 до 2%; 7 бит – случайное изменение на 1 запаздывание.
Нечеткий регулятор (FZCTR) Данный функциональный блок реализует функцию нечеткого регулятора. На вход INP подается регулируемое значение. Вход PV предназначен для задания уставки. На выходе QIY блока формируется величина управляющего воздействия. Выход QDY используется для вывода величины приращения управляющего воздействия на текущем пересчете блока. Вход MAX ограничивает величину приращения управляющего воздействия. Настройки всех нечётких регуляторов узла задаются с помощью блока SFZ.
Настройка FZCTR (SFZ) Данный блок предназначен для настройки диапазонов нечеткого регулятора, реализованного в функциональном блоке FZCTR. Этот блок следует разместить перед каждым регулятором, имеющим индивидуальные настройки.
Показатели качества регулирования (QREG) Этот блок предназначен для оценки качества регулирования. На вход INP подается значение регулируемого параметра, на вход PV – задание. На выходах формируются следующие значения: QdA – максимум абсолютного значения рассогласования (первый скачок при изменении задания исключается); QT – количество тактов с момента изменения задания, на которых рассогласование превышало 1% задания; QS – накапливающаяся сумма модуля рассогласования. При суммировании не учитываются значения меньше 0.5%. Этот выход обновляется каждые 20 тактов.
Обработка сигнала (TRACT) Это блок позволяет реализовать ряд функций по обработке входного сигнала, подаваемого на вход INP. К ним относятся: зона нечувствительности; экспоненциальное сглаживание; ограничение значения.
Переключение с динамической балансировкой (SSWT) Функцией этого блока является реализация безударной коммутации его входов IN0, ... IN3 на выход Q0. Номер входа, коммутируемого на выход, задается входом SEL.
Адаптивное регулирование (APID) Данный блок позволяет организовать регулирование по PID-закону с автоматическим вычислением настроек регулятора. Критерием вычисления настроек является минимизация среднеквадратичной ошибки регулирования. Для настройки регулятора на вход объекта подается пробный гармонический сигнал. При этом амплитуда колебаний регулируемого параметра удерживается в пределах от 0.3% до 1%. Получаемые настройки минимизируют колебания при переходных процессах.
Блок адаптивного регулирования (APDD) Данный блок позволяет организовать регулирование по PDD-закону с автоматическим вычислением настроек регулятора. Работа алгоритма настройки основана на подаче на вход объекта пробного гармонического сигнала. Амплитуда колебаний выходного сигнала объекта по умолчанию удерживается в пределах от 0.3% до 1%. Критерием выбора настроек является минимизация среднеквадратичной ошибки регулирования. Получаемые настройки минимизируют колебания при переходных процессах.
Идентификация объекта (IDNT) Этот блок по кривой отклика на прямоугольный импульс рассчитывает параметры модели инерционного звена первого порядка с запаздыванием.
Модальный регулятор (MREG) Этот блок представляет собой модальный регулятор с функцией вычисления настроек по параметрам объекта управления, что предполагает его совместное использование с блоком IDNT.
Настройка PID-закона по параметрам объекта (CALC) Этот блок рассчитывает коэффициенты PID-регулятора на основе параметров математической модели объекта первого порядка с запаздыванием.
Настройка PID-закона по скачку сигнала задания (RJMP) Этот блок вычисляет настройки ПИ/ПИД регулятора. Для этого он обрабатывает два массива данных: массив значений входа объекта и его выхода. Их накопление начинается при смене задания регулятора на величину, превышающую 6% (от этой величины зависит точность вычисления настроек регулятора). Накопление прекращается, когда объект перейдет в установившееся состояние..
В инструментальной системе работа блоков APID, APDD, IDNT, MREG, CALC, RJMP поддерживается только в отладчике программ. Для использования этого алгоритма в реальном времени требуется Adaptive Control МРВ, Adaptive Control Double Force МРВ или Adaptive Микро TRACE MODE.
Лекция 16
Обработка аварийных ситуаций в TRACE MODE (Алармы)
При работе АСУ могут возникать различные аварии – неисправность датчика, обрыв линии связи, выход из строя контроллера/компьютера, выход параметров техпроцесса за установленные границы и т.п. Чтобы обеспечить непрерывность процесса, система управления должна быть снабжена средствами обнаружения и обработки аварийных ситуаций. В TRACE MODE 6 с этой целью предусмотрены следующие средства:
-
автоматическая установка признака аппаратной недостоверности каналу, связанному с аппаратурой ввода/вывода или каналом другого узла по любому из доступных интерфейсов взаимодействия в случае сбоя при обмене данными;
-
автоматическая установка признака программной недостоверности каналу при выходе его значения за установленные пределы;
-
мониторинг значения каналов FLOAT (аналоговые алармы)– для этих каналов задаются 6 границ, с помощью которых возможно своевременное обнаружение нештатного состояния процесса;
-
мониторинг событий (в том числе аварий) с помощью канала класса Событие;
TRACE MODE 6 располагает средствами, позволяющими выполнить при работе АСУ действия, направленные на предотвращение возникновения или развития аварии. К таким средствам относятся, например, возможность включения сигнализации, выдачи рекомендации оператору, блокировки и т.п. Информация о состоянии процесса может быть сохранена в архивы и в отчет тревог.
Отчет тревог – это текстовый файл (ASCII), в который заносятся сообщения, генерируемые в различных ситуациях при работе АСУ. Отчет тревог конфигурируется в редактора узла для всего узла целиком. В отчет тревог могут быть записаны сообщения следующих видов:
-
системные сообщения;
-
сообщения по каналам;
-
сообщения, генерируемые с помощью системной переменной @Message;
-
интерактивные сообщения оператора.
Сообщение о событии заносится в отчет тревог в виде отдельной строки. Максимальный размер файла отчета тревог ограничивается максимальным поддерживаемым размером файла в файловой системе. По достижении предельного размера файла, новые сообщения начинают записываться с начала отчета тревог. Предельно допустимое число строк в отчете тревог задается при его конфигурировании. При переполнении новые сообщения записываются с начала отчета тревог (со второй строки). Для просмотра ОТ имеются специальные графические элементы: строка отчета тревог (выводится последняя запись); отчет тревог узла (выводятся все записи).
Важным понятием в системе алармов является квитирование. Квитирование – это подтверждение оператором факта получения сообщения об аларме.
Формат строки отчета тревог
Строка сообщения в отчете тревог содержит следующие предопределенные поля, разделенные пробелами:
Date Time Category Name Coding Text UserID T_ack N
Date и Time – дата и время события;
Category – категория сообщения, задающих степень его ответственности:
-
< > Без класса;
-
<M> Сообщение;
-
<W> Предупреждение;
-
<E> Ошибка;
-
<I> Информация;
-
<A> Тревога;
-
<R> Изменение атрибутов;
-
<S> Пользовательское;
-
<_> Невидимое (не передается в графику);
-
<-> Неквитируемое;
-
<!> Командное;
-
<?> Резерв.
Name – для сообщения по каналу – имя канала; для системного сообщения, не связанного с каналом, – <имя файла prj без расширения>_<порядковый номер узла>;
Coding – кодировка канала;
Text – текст сообщения. Тексты сообщений для событий могут быть заданы в словарях. Если канал связан со словарем, генерируются сообщения из словаря, в противном случае монитор генерирует сообщения по умолчанию;
UserID – числовой идентификатор пользователя, квитировавшего сообщение;
T_ack – время квитирования сообщения;
N – порядковый номер строки в ОТ в формате HEX (возможно, не работает).