Интерфейс rs-485
Следующим шагом стало создание интерфейса RS-485, также спроектированного как балансная дифференциальная пара. Однако интерфейс RS-485 обеспечивает обмен данными между несколькими устройствами по одной двухпроводной линии связи в полудуплексном режиме. Он широко используется в промышленности при создании АСУТП в качестве физического уровня промышленных сетей.
RS-485 обеспечивает передачу данных со скоростью до 10 Мбит/с. Максимальная дальность зависит от скорости: при скорости 10 Мбит/с максимальная длина линии — 120 м, при скорости 100 кбит/с — 1200 м.
Количество устройств, подключаемых к одной линии интерфейса, зависит от типа примененных в устройстве приемопередатчиков. Один передатчик рассчитан на управление 32 стандартными приемниками. Выпускаются приемники со входным сопротивлением 1/2, 1/4, 1/8 от стандартного. При использовании таких приемников общее число устройств может быть увеличено соответственно: 64, 128 или 256. Применяя репитеры, можно увеличить количество адресуемых устройств практически неограниченно.
RS-485 должен использоваться с проводкой, называемой "витая пара". Витая пара – это просто пара проводов, которые имеют равную длину и свиты вместе. Использование передатчика, отвечающего требованиям спецификации RS-485, с кабелем на основе витой пары, уменьшает два главных источника проблем для разработчиков быстродействующих территориально распределенных сетей, а именно излучаемые электромагнитные помехи и индуцируемые электромагнитные помехи (наводка).
Для уменьшения искажений при передаче данных в RS-485 используется согласующий резистор - это просто резистор, который установлен на крайнем конце или концах кабеля. В идеале, сопротивление согласующего резистора равно волновому сопротивлению кабеля.
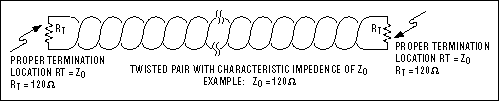
Согласующие резисторы должны иметь сопротивление, равное волновому сопротивлению витой пары и должны размещаться на дальних концах кабеля.

Сеть RS-485 с одним передатчиком и несколькими приемниками.
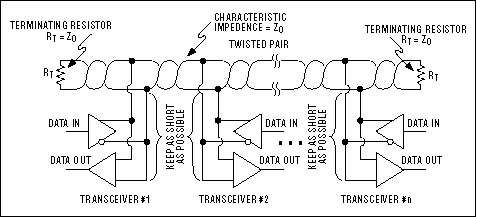
Сеть RS-485 с несколькими приемопередатчиками.
Лекция 21
Промышленные сети
Существует боле десятка промышленных сетей, находящих достаточно широкое применение в сфере автоматизации производства. Это обусловлено тем, что промышленные сети призваны выполнять специфический набор функций:
-
жесткая детерминированность (предсказуемость) поведения;
-
обеспечение функций реального времени;
-
передача небольших порций информации;
-
работа на длинных линиях с использованием недорогих физических сред (например, витая пара);
-
повышенная надёжность физического и канального уровней передачи данных для работы в промышленной среде (высокий уровень электромагнитных помех);
-
наличие специальных высоконадёжных механических соединительных компонентов;
В основе физического уровня практически всех полевых шин лежит интерфейс RS-485 как электрическое содержание среды передачи, различие состоит в своде правил движения информации. Однако в качестве среды передачи могут использоваться также оптоволокно и радиоканал.
Проведём обзор наиболее распространённых протоколов промышленных сетей.
MODBUS
Протокол Modbus был разработан для сбора данных контроллерами Modicon с первичных (подчиненных) приборов (контроллеров). Структура протокола чрезвычайно сильно оптимизирована для использования в ПЛК. В частности данные передаваемые в запросах интерпретируются как регистры данных в ПЛК. Протокол открытый для собственного использования. Физический уровень - RS-232C. Тип обмена : "Master-контроллер" - запрос, "slave-контроллер" - ответ. Поддерживается до 247 адресуемых "slave-контроллера". Возможна передача широковещательного запроса (адрес - 0). Возможны два режима протокола: RTU и ASCII. В зависимости от выбранного режима различаются параметры RS-232C и другие. RTU - команды и данные передаются в бинарном виде. ASCII- команды и данные передаются в ASCII кодах. Черезвычайно прост для реализации.
MODBUS PLUS
Спецификация Modbus Plus стала радикальной переработкой протокола Modbus. Основное назначение Modbus Plus организация сетей из устройств количеством до 64 единиц с возможностью объединения этих сетей через мосты. Скорость передачи данных по сети до 1000000 бит/сек. Сетевая шина использует или одиночный или двойной кабель (для улучшения надежности системы). В качестве кабельной сети используется экранированная витая пара. До 32 узлов может быть подключено к кабелю сети непосредственно на дистанции 450 метров. Может использоваться повторитель для удлинения кабеля до 1800 метров и увеличения количества узлов до 64. Сети могут соединяться между собой мостами. При этом сообщения из узла в одной сети могут быть переданы (маршрутизированы) к узлу в другой сети. Передача данных внутри сети опирается на известный механизм делегирования маркера. В каждый конкретный момент передачу запросов осуществляет только один узел. Узел получивший запрос сразу отправляет подтверждение в его получении. После завершения сеанса опроса узлов активный узел передает маркер следующему узлу с большим адресом и т.д. Сами запросы, как и в случае с Modbus, опираются на регистровую структуру ПЛК.
BITBUS
Протокол BITBUS разработан фирмой INTEL в 1984 году для построения распределенных систем, в которых должны обеспечиваться высокая скорость передачи, детерминированность и надежность доставки данных. В 1991 году BITBUS получил статус стандарта IEEE-1118. В основе реализации протокола BITBUS лежит использование протокола SDLC (подмножество HDLC от IBM), имеющего хорошие показатели по обнаружению ошибок. Структура сети всегда включает один ведущий (Master) узел и до 249 ведомых (Slave) узлов. Физический уровень основан на RS-485, но возможна работа и по оптическому кабелю. Продвижением BITBUS занимается Европейская группа пользователей и производителей BITBUS-компонентов BEUG (Bitbus European Users Group).
CAN
CANbus - это последовательная шина c децентрализованным доступом к ней на основе CSMA/CA-модели (множественный доступ с контролем несущей и встроенным механизмом разрешения коллизий). Проблема одновременного доступа к шине разрешается на основе назначаемых приоритетов передаваемым сообщениям. CAN хорошо специфицирован на первых двух уровнях OSI-модели, которые послужили отправной точкой в развитии целого семейства промышленных сетей, к сожалению, не совместимых друг с другом: CANopen, SDS (Honeywell), DeviceNET (Allen Bradley), CAL (CiA Ассоциациа), CAN11 (BMW), SeleCAN (Selectron), Kingdom (Kvaser), MiCAN (RMI) и несколько других. Координацию в развитии CAN-технологии осуществляет соответствующая международная ассоциация потребителей и производителей: CAN in Automation (CiA).
Спецификация CAN была разработана BOSH для интегрирования разнообразных датчиков автомобильной электроники в рамках одной цифровой сети. В данный момент это очень распространенная технология не только в рамках автопромышленности. К сожалению (или к счастью, зависит от точки зрения) спецификация CAN определяет только два уровня: физический (битовое кодирования, декодирование, синхронизация), data link. Причем физический уровень не определяет параметры передатчика, приемника и среды передачи сигнала. Естественно многие производители воспользовались таким положением вещей и дополняя спецификацию CAN оставшимися уровнями OSI создали свои собственные стандарты.
Основу спецификации CAN составляет принцип адресования сообщений. В отличие от других спецификаций сообщения в CAN передаются не конкретному узлу, а широковещательно с использованием уникального идентификатора сообщения. Каждый узел определяет фильтр пропускающий сообщения из сети только с определенными ID. Существуют две спецификации CAN: 1.2 и 2.0. В CAN 1.2 идентификатор содержит 11 бит, что позволяет использовать до 2^11 сообщений в. В CAN 2.0 идентификатор содержит 29 бит. Определен довольно оригинальный метод разрешения конфликтов выхода разных узлов на общую шину. Многие производители микросхем выпускают CAN контроллеры при этом физическая реализация среды передачи остается на совести разработчика.