

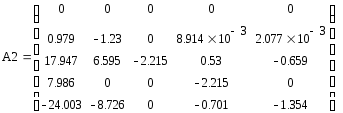
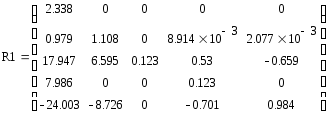
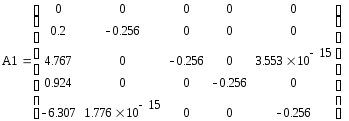
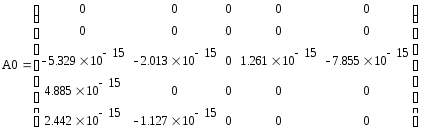
Итерация 1:
![]()
![]()
![]()
![]()
![]()
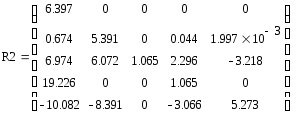
Итерация
2:
![]()
![]()
![]()
![]()
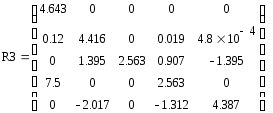
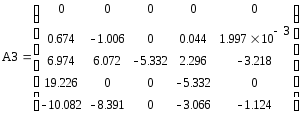
Итерация
3:
![]()
![]()
![]()
![]()
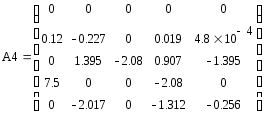
Итерация
4:
![]()
![]()
![]()
![]()

Итерация
5:
![]()
![]()
![]()
Поскольку элементы матрицы R_0 равны нулю, вычисления были выполнены верно.
Характеристический полином системной матрицы А:
![]()
![]()
Тогда передаточная матрица равна:
![]()
Рассчитаем матричную передаточную функцию:

В результате были получены следующие канальные функции:
![]()
![]()
![]()
![]()
Для сравнения представлены ПФ, найденные в пункте 2.2 раздела 2 данной курсовой работы:
![]()
![]()
![]()
![]()
Итак, полученные разными путями ПФ практически (до третьего знака после запятой) совпадают.
5.4 Исследование и преобразование матрично-векторных ММ УОУ
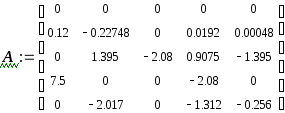
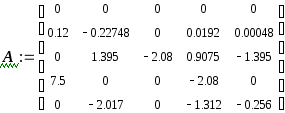
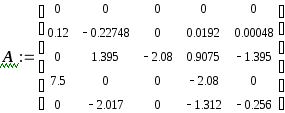
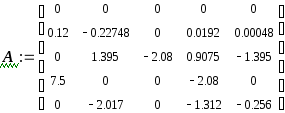
Системная матрица А:
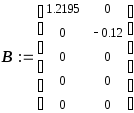
Матрица управления В:

Матрица наблюдений С:
![]()
5.5 Исследование фундаментальных свойств уоу по его матрично-векторной мм
В данном пункте приводится оценка управляемости и наблюдаемости. Эти свойства исследуются как по отдельным входам и выходам, так и в целом для объекта (файлы с расчётами OcenkaUpr.mcd и OcenkaNabl.mcd прилагается).
5.5.1 Исследование управляемости УОУ и его каналов воздействия на выходные переменные
Управляемость – свойство динамической системы, при которой её можно перевести из любого начального состояния x0 в любое конечное за конечный промежуток времени.
Для построения и оценки матриц управляемости и наблюдаемости используется пакет MathCAD.
Свойство управляемости оценивается матрицей управляемости:
![]() .
.
Динамическая
система является вполне управляемой,
если ранг матрицы
![]() равен
равен![]() .
Система не вполне управляема, если ранг
матрицы
.
Система не вполне управляема, если ранг
матрицы![]() меньше
меньше![]() и больше 0. Система является полностью
неуправляемой, если ранг матрицы
управляемости
и больше 0. Система является полностью
неуправляемой, если ранг матрицы
управляемости![]() равен нулю.
равен нулю.
Формула для нахождения матрицы управляемости:
![]() ,
,
где A – системная матрица, B – входная матрица, С – матрица наблюдения.
n=5 – порядок системы.
Оценка управляемости уоу по входу u1:

![]()
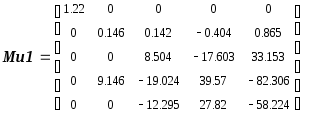
![]()
![]()
Вывод: система вполне управляема по входу u1, т. к. ранг матрицы равен порядку системы, т.е. равен 5.
Оценка управляемости уоу по входу u2:

![]()

![]()
![]()
Вывод: система не вполне управляема по входу u2, т. к. ранг матрицы равен 3, т.е. меньше порядка системы и больше 0.
Дефект d = n – r(Mu) = 5 – 3 = 2.
Оценка управляемости системы в целом:
![]()
![]()
![]()

Вывод: в целом система вполне управляема, т. к. ранг матрицы равен порядку системы, т.е. равен 5.
5.5.2 Исследование наблюдаемости УОУ и его каналов измерения выходных переменных
Динамическая система считается наблюдаемой, если путём наблюдений выходной переменной y система за сколь угодно малый промежуток времени t от t0 до t1, где t1>t0 наблюдается вектор входных механизмов u и, зная математическую модель динамической системы, можно восстановить истинное состояние вектора состояния в момент t0.
Для оценки наблюдаемости динамической системы существует критерий наблюдаемости:
![]()
Система
является вполне наблюдаемой, если ранг
матрицы наблюдаемости равен порядку
этой системы. Система является частично
наблюдаемой, если ранг матрицы
наблюдаемости меньше
![]() и больше нуля. Система является полностью
ненаблюдаемой, если ранг матрицы
наблюдаемости равен нулю.
и больше нуля. Система является полностью
ненаблюдаемой, если ранг матрицы
наблюдаемости равен нулю.