

4.4. Сравнительная оценка синтезированных сау
В результате применения операторного метода и метода отождествления высших производных при синтезе закона управления объектом были получены САУ, удовлетворяющие в обоих случаях критериальной стратегии.
Однако, несмотря на данное преимущество каждый из этих методов имеет свои существенные недостатки:
Операторный метод синтеза ЗУ приводит к получению трудно реализуемого управляющего устройства высокого порядка.
Метод отождествления высших производных приводит к формированию АСУ с ЗУ, содержащим производные высших порядков, вплоть до (n-1)-й, что делает закон практически нереализуемым.
5 Построение и исследование матрично-векторных форм математических моделей (мм) уоу и выработка ксс синтеза зу состоянием уоу в одномерном и многомерном варианте
5.1 Построение матрично-векторной формы (МВ) ММ УОУ
Для построения МВ-формы ММ неполных и многомерных УОУ используется прямой способ построения МВ ММ по структурной схеме УОУ. Если считать, что исследуемая в работе схема соответствует реальной физической или технической структуре объекта, МВ-форму легко получить, приняв за переменные состояния (ПС) выходные переменные всех входящих в схему динамических звеньев. Также для удобства построения матрично-векторной ММ УОУ введем условные промежуточные переменные.
На рисунке 5.1 представлена структурная схема УОУ с указанием на ней переменных состояния, промежуточных переменных, входных и выходных переменных, передаточных функций звеньев.

Рисунок 5.1 - Схема УОУ с обозначением переменных состояния
Поскольку все ДЗ схемы имеют первый порядок, то последовательная запись их ДУ в систему в форме Коши, в которой входной сигнал звена представлен с учетом полной структуры его формирования из ПС и входных воздействий, позволяет получить МВ форму ММ.
Для составления дифференциальных уравнений (ДУ) воспользуемся следующими преобразованиями:
Для
![]() ,
получим:
,
получим:![]() .
.
Для
![]() ,
получим:
,
получим:![]() .
.
Для
![]() ,
получим:
,
получим:![]() ,
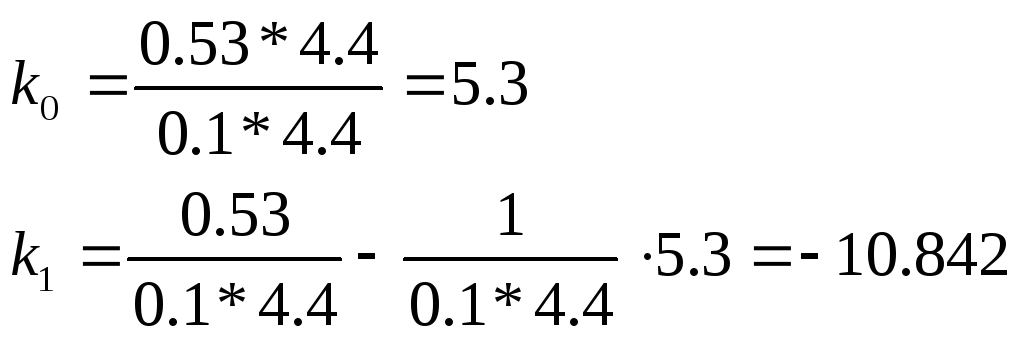
где k0=b1;
k1=b0–a0k0.
,
где k0=b1;
k1=b0–a0k0.
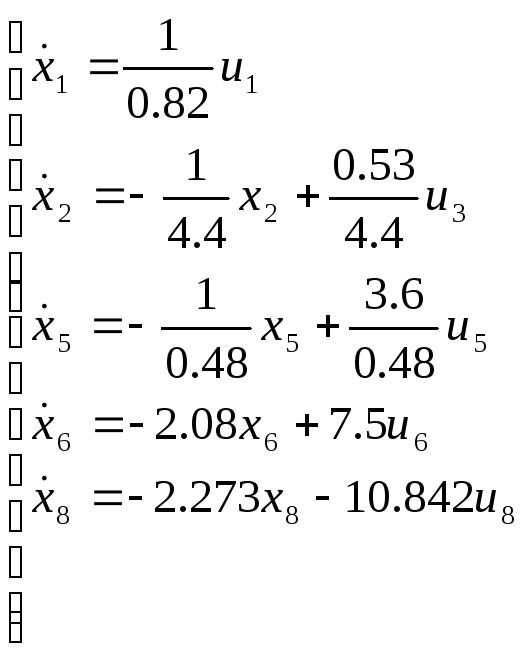
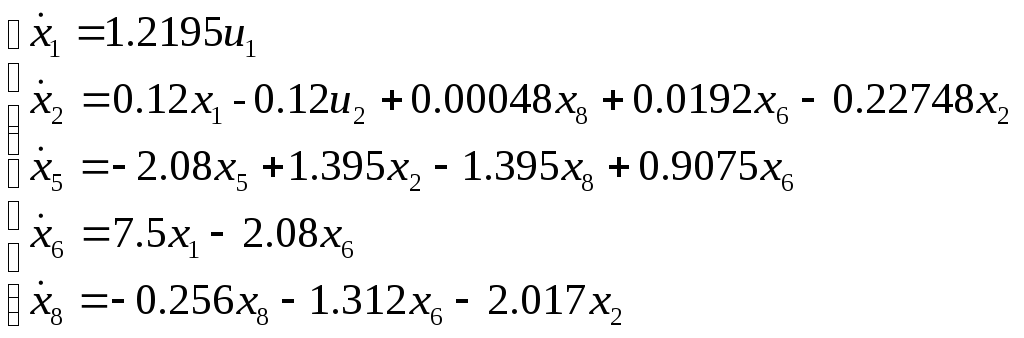
В результате система ДУ будет иметь следующий вид:
Вычислим
коэффициенты ki:
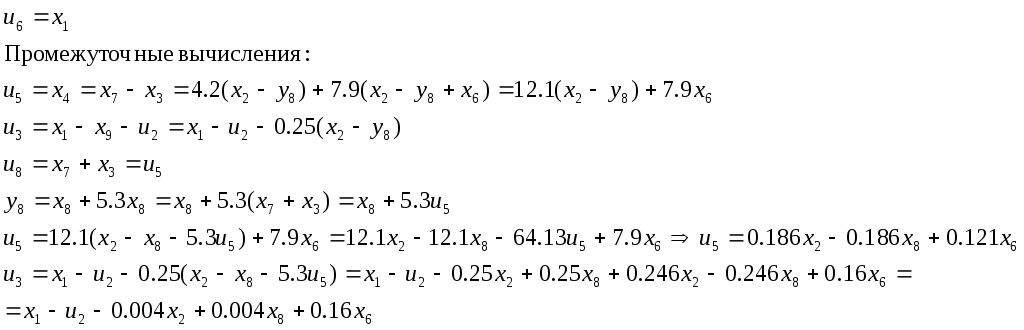
Выведем значения переменных, введённых для упрощения преобразований:
Таким образом, значения временных переменных равны:
![]()
Подставим эти значения в ДУ:
 Применив
элементарные преобразования, получим:
Применив
элементарные преобразования, получим:
5.2 Проверка эквивалентности вход-выходной и матрично-векторной ММ
По системе ДУ, образующих МВ модель, построим структурную схему объекта (рисунок 5.2) и исследуем его в системе Classic (файл 5.MDL прилагается).
В основе построения структурной схемы по МВ описанию лежат правила:
для каждого ДУ в схему добавляется интегратор (звено с
 ),
входным сигналом которого является
производная переменной состояния (
),
входным сигналом которого является
производная переменной состояния ( ),
а выходным – сама переменная состояния
),
а выходным – сама переменная состояния ;
;в соответствии с ДУ на вход интегратора через усилительные звенья подаются входные воздействия и переменные состояния;
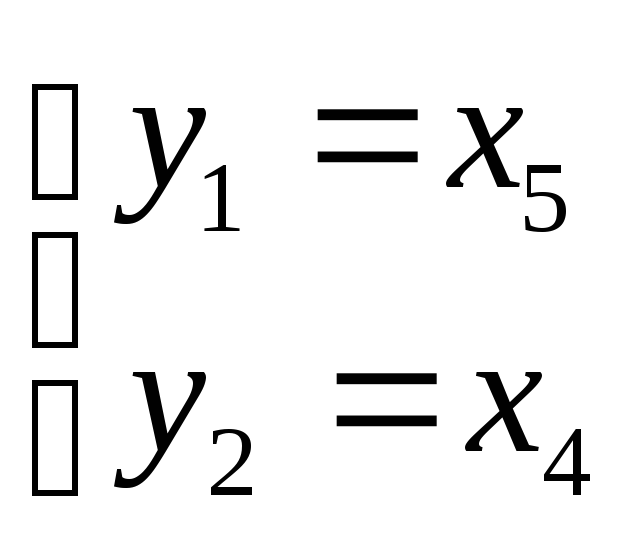
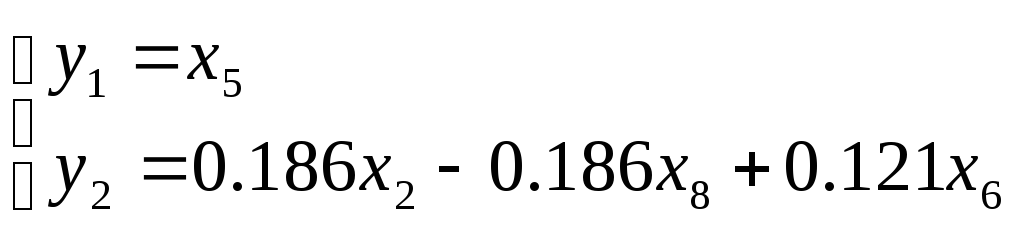
выходные сигналы формируются по уравнению наблюдения как сумма переменных состояния.
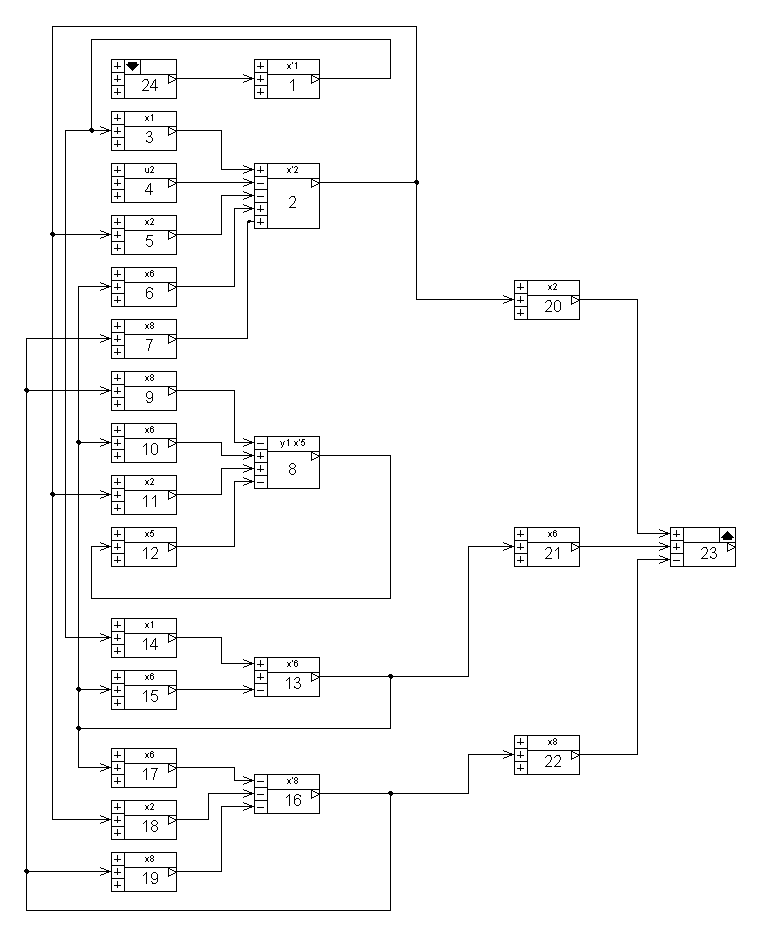
Рисунок 5.2 - Модель ДУ в пакете Classic
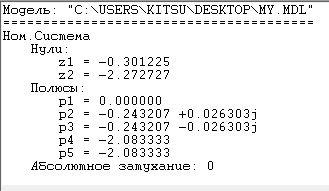
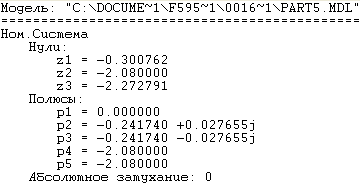
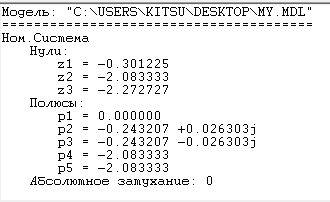
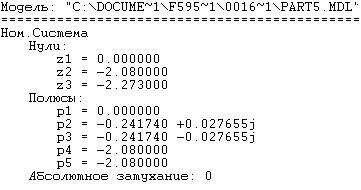
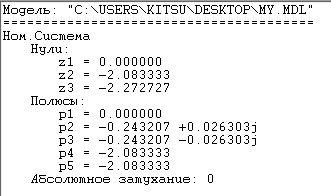
Для проверки идентичности схемы вход-выходной ММ и схемы МВ ММ найдем нули и полюса УОУ (таблица 5.1).
Таблица 5.1 – Нули и полюсы УОУ
|
Схема моделирования МВ формы ММ |
Схема моделирования вход-выходной ММ |
|
U1-Y1 | |
|
|
|
|
U1-Y2 | |
|
|
|
|
U2-Y1 | |
|
|
|

Продолжение таблицы 5.1
|
U2-Y2 | |
|
|
|
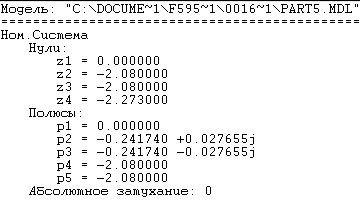
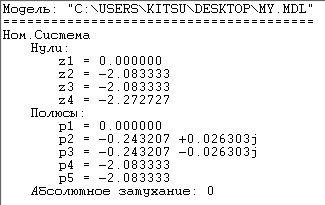
Значения нулей, полученные по матрично-векторной ММ и вход-выходной ММ, практически совпадают. Следовательно, преобразования были выполнены корректно.
5.3 Построение передаточной матрицы УОУ по МВ ММ
Запишем модель объекта в матрично-векторной форме. Вычислим далее передаточную матричную функцию многомерной системы с помощью алгоритма Леверье – Фадеева.
где
 -
вектор переменных состояния,
-
вектор переменных состояния,
![]() -
вектор входных значений
-
вектор входных значений
![]() -
вектор выходных воздействий
-
вектор выходных воздействий
Системная матрица А:

Матрица управления В:
Матрица наблюдений С:
Матрицу
![]() ,
задающую связь между векторами выхода
,
задающую связь между векторами выхода![]() и входа
и входа![]() называют передаточной матричной
функцией многомерной системы. Её
построение проще осуществляется с
использованием алгоритма Леверье –
Фадеева, который состоит в следующем:
называют передаточной матричной
функцией многомерной системы. Её
построение проще осуществляется с
использованием алгоритма Леверье –
Фадеева, который состоит в следующем:
представим передаточную матричную функцию как отношение двух полиномов:
![]()
где
![]() –характеристический
полином
–характеристический
полином
![]() –некоторый
матричный полином
–некоторый
матричный полином
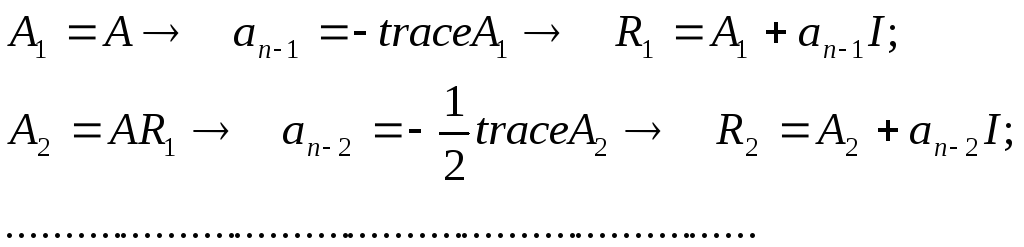
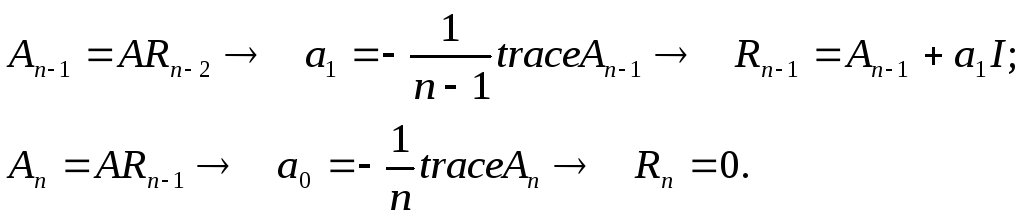
Коэффициенты
![]() и матрицы
и матрицы![]() можно вычислить по следующим формулам:
можно вычислить по следующим формулам:
Окончательно
![]()
Этот алгоритм для УОУ данного варианта реализуем с помощью Mathcad 14 (файл 5 часть, п. 5.mсd прилагается):