

Варианты
|
№ |
Передаточная
функция объекта регулирования |
№ |
Передаточная
функция объекта регулирования |
|
1. |
|
16. |
|
|
2. |
|
17. |
|
|
3. |
|
18. |
|
|
4. |
|
19. |
|
|
5. |
|
20. |
|
|
6. |
|
21. |
|
|
7. |
|
22. |
|
|
8. |
|
23. |
|
|
9. |
|
24. |
|
|
10. |
|
25. |
|
|
11. |
|
26. |
|
|
12. |
|
27. |
|
|
13. |
|
28. |
|
|
14. |
|
29. |
|
|
15. |
|
30. |
|
Контрольные вопросы.
1. Перечислите и охарактеризуйте основные этапы проектирования ССАР, которые предшествуют синтезу ССАР.
2. Что значит синтез ССАР?
3. Каков порядок выбора регулятора в случае объекта с двумя доминирующими постоянными времени?
4. Перечислите и охарактеризуйте наиболее распространенные методы определения оптимальных значений параметров настройки автоматических регуляторов для работы одноконтурных ССАР.
5. Каково влияние пропорционального регулятора на критерии качества ССАР?
6. Каково влияние интегрального регулятора на критерии качества ССАР?
7. Каково влияние дифференциального регулятора на критерии качества ССАР?
Список рекомендуемой литературы.
1. Аркадьев В.Ю., Папченко А.И., Попруга А.Г., Боярчук В.П. Проектирование по теории автоматического управления / Под общей редакцией д.т.н., профессора Аркадьева В.Ю. – Херсон: ХГТУ, 2002. – 272 с.
2. Катханов М.Н. Теория судовых автоматических систем. Учебник. – Л.: Судостроение, 1985. – 376 с.
3. Попович М.Г., Ковальчук О.В. Теорія автоматичного керування: Підручник. – К.: Либідь, 1997. – 544 с.
4. Зайцев Г.Ф. Теория автоматического управления и регулирования.
5. Теория автоматического управления: Учебн. Для вузов. В 2-х частях., /Под ред. А.А.Воронова. 2-е изд.М.: Высш.шк, 1986. –504 с.,ил.
6. Сборник задач по теории автоматического регулирования и управления / Под ред. В.А. Бесекерского М.: Наука, 1978 – 512 с.
7. Справочник по теории автоматического управления/Под ред. А.А.Красовского.-М.:Наука.Гл.ред.физ.-мат.,лит.,1987.-712с.
8. Теория систем автоматического регулирования. Бесекерский В.А., Попов Е.П.,М.:Наука,1975.-708 с.
Лабораторная работа № 4
Тема: Моделирование нелинейных САС.
Цель работы: Освоить процесс моделирования нелинейных САС с разными типами нелинейностей с использованием пакета Simulink системы matlab.
Краткие теоретические сведения
Моделирование состоит в выявлении основных свойств исследуемого процесса, построении моделей и их применении для прогнозирования поведения натуры. Критерием правильности моделирования является практика.
Ценность методов моделирования состоит в том, что они позволяют существенно сократить и облегчить натуральный эксперимент, который часто дорог, сложен или связан с аварийными состояниями, и увеличить достоверность математического описания и расчетов [3].
Нелинейной называется САС, движение которой не может быть описано линейными дифференциальными уравнениями. Нелинейной является система, содержащая хотя бы одно нелинейное звено, т.е. звено, описываемое нелинейным уравнением. Все реальные САС – нелинейные, так как идеальных линейных звеньев не бывает. Нелинейные элементы, имеющиеся в канале передачи и преобразования сигнала, обычно оказывают нежелательное влияние на качество процессов управления, внося нелинейные искажения и приводя к незатухающим колебаниям системы – автоколебаниям. Однако в некоторых случаях в целях придания определенных динамических свойств в систему намеренно вводят нелинейные звенья.
Реальные нелинейные характеристики обычно имеют сложный криволинейный вид, описываемый сложными математическими зависимостями. После кусочно-линейной аппроксимации можно выделить следующие типовые существенно нелинейные характеристики: ограничение (насыщение); зона нечувствительности; гистерезис; комбинированные нелинейные характеристики.
Ограничение. Такую характеристику часто называют «характеристикой с зоной насыщения» (рис. 1).
|
|
|
|
Рис. 1 – Характеристика с зоной насыщения | |

Зона
нечувствительности.
Зона
нечувствительности определяет тот
порог
![]() ,
до которого при подаче входного сигнала
,
до которого при подаче входного сигнала![]() не возникает выходного сигнала
не возникает выходного сигнала![]() (рис. 2).
(рис. 2).
|
|
|
|
Рис. 2 – Характеристика с зоной нечувствительности | |

Гистерезис. Пример гистерезисной характеристики дан на рис. 3.
|
|
|
|
Рис. 3 – Гистерезис | |

Как видно из
рисунка, такая характеристика имеет
зону нечувствительности, равную ширине
петли
![]() .
.
Релейная характеристика. На рис. 4 показана идеальная релейная характеристика, так как реальные двухпозиционные реле всегда имеют зону нечувствительности и на их работу оказывает влияние явление гистерезиса. При идеальной релейной характеристике предполагается, что знак выходного напряжения скачком изменяется при изменении знака управляющего тока:
|
|
|
|
|
Рис. 4 – Идеальная релейная характеристика |

Все нелинейные
характеристики могут быть разделены
на однозначные и неоднозначные,
симметричные и несимметричные, четные
и нечетные. Характеристика однозначна,
если любому значению входного сигнала
![]() соответствует единственное значение
выходного сигнала
соответствует единственное значение
выходного сигнала![]() (рис. 5 –а,
б, в). Если
характеристика неоднозначна,
то величина выходного сигнала определяется
не только входным сигналом, но и его
производными на некотором предшествующем
интервале (рис. 5 – г,
д, е).
(рис. 5 –а,
б, в). Если
характеристика неоднозначна,
то величина выходного сигнала определяется
не только входным сигналом, но и его
производными на некотором предшествующем
интервале (рис. 5 – г,
д, е).
|
|
|
Рис. 6 – Однозначные и неоднозначные нелинейные характеристики |

Характеристику
называют симметричной, если
![]() (рис. 7 –а,
б, в).
Характеристику
называют четной, если
(рис. 7 –а,
б, в).
Характеристику
называют четной, если
![]() .
Рис. 7,г.
.
Рис. 7,г.
|
|
|
Рис. 7 – Симметричные и четные нелинейные характеристики. |

|
|
|
Рис. 8 – Сложные нелинейные характеристики |

Нелинейные характеристики более сложного вида содержат элементы, являющиеся характеристиками типовых нелинейностей. Например, характеристика на рис. 8, а имеет зону нечувствительности и ограничение, характеристика на рис. 8, б имеет ограничение и гистерезис и т. д.
Ход работы.
1. Перед началом моделирования нелинейной САС изучить свойства нелинейных блоков Simulink, для чего набрать схемы моделирования и получить соответствующие характеристики согласно таблице 1.
Таблица 1 – Типы нелинейных блоков Simulink
|
Название блока, краткая характеристика |
Схема моделирования |
Динамическая и статическая характеристики блока |
|
Блок ограничения Saturation Назначение: Выполняет ограничение величины сигнала. Параметры:
Выходной сигнал блока равен входному если его величина не выходит за порог ограничения. По достижении входным сигналом уровня ограничения выходной сигнал блока перестает изменяться и остается равным порогу. На рис. Показан пример использования блока для ограничения синусоидального сигнала. |
|
|
|
Блок с зоной нечувствительности Dead Zone Назначение: Реализует нелинейную зависимость типа «зона нечувствительности (мертвая зона)». Параметры:
Выходной сигнал блока вычисляется в соответствии со следующим алгоритмом:
|
|
|
|
Релейный блок Relay Назначение: Реализует релейную нелинейность. Параметры:
Выходной сигнал блока может принимать два значения. Одно из них соответствует включенному состоянию реле, второе – выключенному. Переход их одного состояния в другое происходит скачком при достижении входным сигналом порога включения или выключения реле. В том случае если пороги включения и выключения реле имеют разные значения, то блок реализует релейную характеристику с гистерезисом. При этом значение порога включения должно быть больше, чем значение порога выключения. На рис. Показан пример использования блока Relay. На временных диаграммах видно, что включение реле происходит при достижении входным сигналом величины 0.5, а выключение при – 0.5.
|
|
|
|
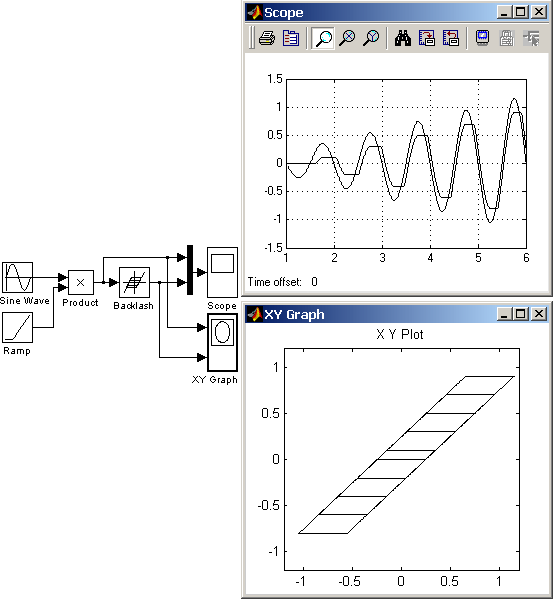
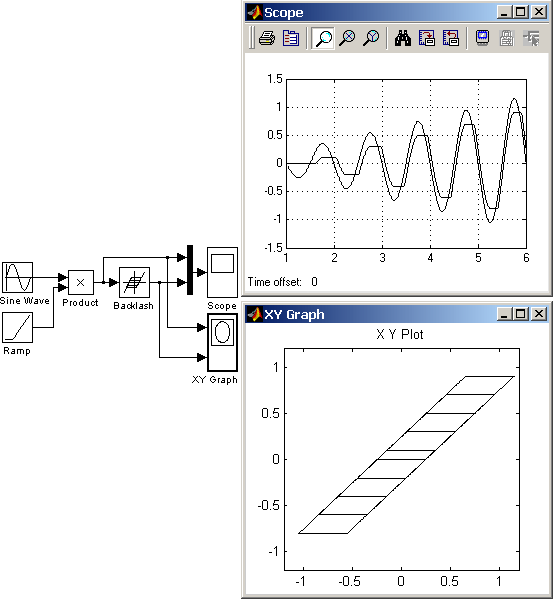
Блок люфта Backlash Назначение: Моделирует нелинейность типа “люфт”. Параметры:
Сигнал на выходе будет равен заданному значению Initial output, пока входной сигнал при возрастании не достигнет значения(Deaband width)/2 (гдеU – входной сигнал), после чего выходной сигнал будет равенU-(Deaband width)/2. После того как, произойдет смена направления изменения входного сигнала, он будет оставаться неизменным, пока входной сигнал не изменится на величину(Deaband width)/2, после чего выходной сигнал будет равенU+(Deaband width)/2. На рис. Показан пример работы блока Backlash. Входной сигнал блока гармонический с линейно возрастающей амплитудой.
|
|
|
|
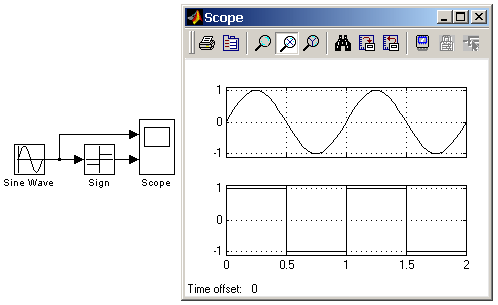
Блок определения знака сигнала Sign Назначение: Определяет знак входного сигнала. Параметры: Нет. Блок работает в соответствии со следующим алгоритмом:
|
|
|








2. Набрать в пакете Simulink системы matlab схему моделирования нелинейной схемы (см. рис. 9). Вид нелинейности, а также передаточную функцию, которой задан объект управления, выбрать согласно варианту.
3. Проанализировать влияние нелинейности на объект управления, сделать вывод.
|
а) |
|
б) |
|
в) |
|
г) |
|
Рис.
9 – Схема моделирования
нелинейной САС с релейным элементом
с зоной неоднозначности
(а – схема моделирования САС без релейного элемента; б – диаграмма выходной величины; г - схема моделирования САС с релейным элементом; д – диаграмма выходной величины) |




Варианты
|
№ |
Передаточная функция объекта
|
Вид нелинейного элемента |
№ |
Передаточная функция объекта
|
Вид нелинейного элемента |
|
1. |
|
Dead Zone (блок с зоной нечувствительности) |
15. |
|
Saturation (блок ограничения) |
|
2. |
|
Relay (релейный блок) |
16. |
|
Dead Zone (блок с зоной нечувствительности) |
|
3. |
|
Sign (блок определения знака сигнала) |
17. |
|
Relay (релейный блок) |
|
4. |
|
Блок люфта |
18. |
|
Sign (блок определения знака сигнала) |
|
5. |
|
Saturation (блок ограничения) |
19. |
|
Блок люфта |
|
6. |
|
Dead Zone (блок с зоной нечувствительности) |
20. |
|
Dead Zone (блок с зоной нечувствительности) |
|
7. |
|
Relay (релейный блок) |
21. |
|
Relay (релейный блок) |
|
8. |
|
Sign (блок определения знака сигнала) |
22. |
|
Sign (блок определения знака сигнала) |
|
9. |
|
Блок люфта |
23. |
|
Блок люфта |
|
10. |
|
Saturation (блок ограничения) |
24. |
|
Saturation (блок ограничения) |
|
11. |
|
Dead Zone (блок с зоной нечувствительности) |
25. |
|
Dead Zone (блок с зоной нечувствительности) |
|
12. |
|
Relay (релейный блок) |
26. |
|
Relay (релейный блок) |
|
13. |
|
Sign (блок определения знака сигнала) |
27. |
|
Sign (блок определения знака сигнала) |
|
14. |
|
Relay (релейный блок) |
28. |
|
Relay (релейный блок) |
Контрольные вопросы.
1. Сформулируйте суть моделирования САС.
2. Что называется нелинейной САС?
3. Перечислите и охарактеризуйте типовые существенно нелинейные характеристики.
4. В чем состоит отличие однозначных и неоднозначных нелинейных характеристик?
5. Какую нелинейную характеристику называют симметричной?
6. Какую нелинейную характеристику называют четной?
Список рекомендуемой литературы.
1. Аркадьев В.Ю., Папченко А.И., Попруга А.Г., Боярчук В.П. Проектирование по теории автоматического управления / Под общей редакцией д.т.н., профессора Аркадьева В.Ю. – Херсон: ХГТУ, 2002. – 272 с.
2. Катханов М.Н. Теория судовых автоматических систем. Учебник. – Л.: Судостроение, 1985. – 376 с.
3. Попович М.Г., Ковальчук О.В. Теорія автоматичного керування: Підручник. – К.: Либідь, 1997. – 544 с.
4. Попов Е.П. Теория нелинейных систем автоматического регулирования и упраления.М.:Наука,1988.-256 с.
5. Теория автоматического управления/Под ред. А.В.Нетушила – М.: Высш. шк.,1983.-432 с.
6. Справочник по теории автоматического управления / Под ред. А.А.Красовского.-М.:Наука.Гл.ред.физ.-мат.,лит.,1987.-712 с.
7. Теория систем автоматического регулирования. Бесекерский В.А., Попов Е.П.,М.:Наука,1975.-708 с.