

1.6.6. Метод Гаусса решения систем неоднородных уравнений
Методом Гаусса решаются неоднородные системы уравнений AX=B.
Суть метода Гаусса:
1) систему уравнений приводят к треугольному виду;
2) определяют свободные и связанные неизвестные;
3) составляют крамеровскую систему и решают по правилу Крамера;
4) записывают общее решение системы.
Замечание. В методе Гаусса ранг матрицы определяется автоматически.
Пример. Решить систему линейных уравнений методом Гаусса.

Запишем расширенную матрицу преобразованной системы и найдем ее ранг.
 ,тогда
,тогда
![]() ,x4
- свободная
неизвестная; x1,
x2,
x3 –
базисные
неизвестные. Выразим базисные неизвестные
через свободные:
,x4
- свободная
неизвестная; x1,
x2,
x3 –
базисные
неизвестные. Выразим базисные неизвестные
через свободные:

Пусть x4=С, тогда 7x2=4+2С, х2=4/7+2С/7, х1=4С/7-6/7.
Ответ: общее решение
системы Х= .
.
Методом Гаусса решаются так же крамеровские системы, т.е. системы, в которых число уравнений равно числу неизвестных и detA0. В этом случае мы сразу получаем единственное решение системы.
Пример. Решить систему линейных уравнений
 .
.
Решение: 1) умножим первое уравнение на (-2) и прибавим его ко второму уравнению;
2) умножим первое уравнение на (-5) и прибавим его к третьему уравнению; получим систему:
 .
.
3) Умножим второе уравнение системы на 3 и прибавим его к третьему уравнению:
 .
.
4) Найдем последовательно x3, x2, x1.

Ответ: .
.
2. Векторная алгебра
2.1. Понятие вектора
Вектором называется направленный отрезок прямой, то есть отрезок, относительно которого указано, какая из его точек является началом, какая концом.

Вектор можно
обозначать
![]() ,
гдеА
– начало вектора, В
- его конец, или
,
гдеА
– начало вектора, В
- его конец, или
![]() .
.
Длиной
или
модулем
вектора называется расстояние между
началом и концом вектора, обозначают
|![]() |,
|
|,
|![]() |.
|.
Единичным вектором
называется вектор
![]() ,
модуль которого равен единице: |
,
модуль которого равен единице: |![]() |=1.
|=1.
Нулевым вектором
называется вектор, у которого начало
совпадает с концом. Обозначается:
![]() .
.
Нулевой вектор не имеет ни длины, ни направления.
Два вектора называются равными, если они имеют равные длины и совпадающие направления.
Ортом
вектора
![]() называется единичный вектор, направление
которого совпадает с направлением
вектора
называется единичный вектор, направление
которого совпадает с направлением
вектора![]() .
Обозначается:
.
Обозначается:
![]() .
.
Два вектора
![]() и
и![]() называютсяколлинеарными,
если они параллельны одной и той же
прямой. Коллинеарные вектора могут
быть:
называютсяколлинеарными,
если они параллельны одной и той же
прямой. Коллинеарные вектора могут
быть:
- сонаправленными,
обозначают:
![]()
![]() ;
;
- противоположно
направленными, обозначают:
![]()
![]() .
.
Три вектора называются компланарными, если они параллельны одной и той же плоскости.
2.2. Линейные операции над векторами
1.
Суммой
двух векторов
![]() и
и![]() называется вектор
называется вектор![]() =
=![]() +
+![]() ,
получаемый по правилам:
,
получаемый по правилам:
а
 )
правило треугольника; б) правило
параллелограмма.
)
правило треугольника; б) правило
параллелограмма.
Разностью
векторов
![]() и
и![]() называется вектор
называется вектор![]() ,
если
,
если![]() +
+![]() =
=![]() ,
разность векторов обозначается
,
разность векторов обозначается![]() -
-![]() .
.

2. Произведением
вектора
![]() на число
называется вектор
на число
называется вектор ![]() ,
удовлетворяющий условиям:
,
удовлетворяющий условиям:
|
 |=|||
|=||| |
- модуль вектора
|
- модуль вектора равен произведению модуля вектора
равен произведению модуля вектора на модуль числа;
на модуль числа;

 - векторы
сонаправлены, если >0,
- векторы
сонаправлены, если >0,
![]()
![]() - векторы
противоположно направлены, если <0.
- векторы
противоположно направлены, если <0.
Два вектора
![]() и
и![]() коллинеарны тогда и только тогда, когда
выполнено условие:
коллинеарны тогда и только тогда, когда
выполнено условие:
![]() =
=![]() .
.
2. 3. Проекция вектора на ось
У глом
между векторами
глом
между векторами
![]() и
и![]() называется наименьший из двух углов
(0),
на который надо повернуть один вектор,
чтобы его направление совпало со вторым
после приведения этих векторов к общему
началу:
называется наименьший из двух углов
(0),
на который надо повернуть один вектор,
чтобы его направление совпало со вторым
после приведения этих векторов к общему
началу:
![]() .
.
Рассмотрим ось l,
положительное направление которой
задано единичным вектором
![]() (ортом оси).
(ортом оси).
Проекцией точки А на ось l называется точка пересечения оси l с плоскостью, проходящей через точку А перпендикулярно оси l - точка А1.
Рассмотрим
произвольный вектор
![]() .
Пусть точкаА1
– проекция начала вектора на ось, В1
- проекция конца вектора.
.
Пусть точкаА1
– проекция начала вектора на ось, В1
- проекция конца вектора.
Проекцией вектора
![]() на осьl
называется положительное число, равное
модулю вектора проекции
на осьl
называется положительное число, равное
модулю вектора проекции
![]() ,
если угол
между вектором
,
если угол
между вектором
![]() и
о
и
о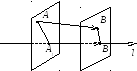 сью
сью![]() острый,
и отрицательное число
-
острый,
и отрицательное число
-![]() ,
если угол между вектором
,
если угол между вектором![]() и
осью
и
осью![]() -
тупой.
-
тупой.
Обозначается
проекция вектора
![]() и вычисляется по формуле:
и вычисляется по формуле:![]() .
.