

080100Экономика(МатАнализ и ЛинАлгебра) / Лекции_Линейная_алгебра
.pdfЧисла вида z =iy называются чисто мнимыми. Они изображаются точ-
ками, лежащими на оси Oy . Поэтому ось Oy называется мнимой осью.
2.3.1.3. Модуль и аргумент комплексного числа
Пусть комплексное число z = x +iy изображено вектором OM =(x, y) на
плоскости. Тогда модуль r вектора OM называется модулем комплексного числа z и обозначается | z |. Следовательно,
z |
|
= r = x2 + y2 . |
(11) |
|
Полярный угол ϕ точки M или аргумент вектора OM называются аргу-
ментом комплексного числа z и обозначается arg z . По аналогии с аргумен-
том вектора аргумент комплексного числа определяется по формуле
|
|
|
|
arg z = ϕ = arctg |
y |
|
0, |
x ≥ 0, |
|
|
|
|
|
|
|
|
(12) |
||||
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
x < 0. |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
x |
π, |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
2.3.1.4. Примеры |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Найти модули и аргументы чисел z1 = −2 − 2i , z2 =1 − 3i , |
z3 = −2i . |
|
|
|
||||||||||||||
|
|
|
Решение. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а) z1 = −2 − 2i Re z1 = x1 = −2 < 0, Im z1 = y1 = −2 |
|
|
|
|
|
|
|
|
|
|||||||||
|
z |
|
= r = |
(−2)2 + (−2)2 = 8 = 2 |
2, arg z |
= ϕ = arctg −2 |
+ π = π + π = 5π. |
|
|
|
|||||||||||
|
|
|
|
|
|||||||||||||||||
|
1 |
|
1 |
|
1 |
1 |
−2 |
|
|
4 |
|
|
4 |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
б) |
z3 = −2i . В том случае, |
когда комплексное |
–1 |
y |
|
|
1 |
2 |
|
|||||||||
|
|
|
|
|
|
||||||||||||||||
число является чисто действительным |
или |
чисто |
|
|
|
||||||||||||||||
O |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
мнимым, его модуль и аргумент можно определять |
|
|
|
|
|
|
|
|
|
|
x |
||||||||||
|
|
–1 |
|
|
|
ϕ3 |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
без привлечения формул (11), (12) непосредственно |
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||
из чертежа: ϕ3 = − π , r3 = 2 . |
|
|
|
|
|
|
|
|
–2 |
|
|
|
–2i |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
РИС. 2.3.2 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
31
2.3.2. Алгебраическая и тригонометрическая формы комплексного числа
2.3.2.1. Правила арифметических действий над комплексными числами в алгебраической форме
Арифметические действия над комплексными числами в алгебраической форме проводятся по обычным правилам действий над двучленами с учетом равенства i2 = −1.
1)Сложение. z1 + z2 = (x1 + iy1) + (x2 + iy2 ) = (x1 + x2 ) + i( y1 + y2 ) .
2)Вычитание. z1 − z2 = (x1 + iy1) − (x2 + iy2 ) = (x1 − x2 ) + i( y1 − y2 ) .
3)Умножение.
z1 z2 =(x1 +iy1) (x2 +iy2 ) = x1x2 + ix1 y2 + ix2 y1 + i2 y1 y2 =
= (x1x2 − y1 y2 ) + i(x1 y2 + x2 y1) .
Здесь использовалось равенство i2 = −1.
Замечание (свойство произведения комплексно-сопряженных чисел).
Рассмотрим произведение двух комплексно-сопряженных чисел z = x +iy и
z = x −iy :
z z =(x +iy)(x −iy) = x2 − (iy)2 = x2 + y2 . 4) Деление.
z |
|
x + iy |
(x + iy )(x − iy |
2 |
) |
|
x x − ix y |
2 |
+ ix y − i2 y y |
2 |
|||||
1 |
= |
1 |
1 |
= |
1 |
1 2 |
|
= |
1 2 |
1 |
2 1 |
1 |
|||
z2 |
|
x2 + iy2 |
|
(x2 + iy2 )(x2 − iy2 ) |
|
|
x22 + y22 |
|
|
||||||
= |
(x1x2 + y1 y2 ) + i(x2 y1 − x1 y2 ) |
= |
x1x2 + y1 y2 |
+ i |
x2 y1 − x1 y2 |
. |
|||
|
|
|
|||||||
|
x2 |
+ y2 |
|
x2 |
+ y2 |
|
x2 |
+ y2 |
|
|
2 |
2 |
2 |
2 |
2 |
2 |
|
||
Здесь мы воспользовались свойством произведения сопряженных чисел (13).
(13)
=
комплексно-
2.3.2.2. Тригонометрическая форма комплексного числа
Пусть r – модуль, ϕ – аргумент комплексного числа z = x +iy . Тогда
можно записать x = r cosϕ, y = r sin ϕ. Следовательно, комплексное число мож-
но переписать в виде |
|
z =r(cosϕ+isin ϕ). |
(14) |
32 |
|
Такая форма записи комплексного числа называется тригонометрической формой.
2.3.3. Показательная функция комплексной переменной. Формула Эйлера
2.3.3.1. Формула Эйлера
Рассмотрим теперь показательную функцию с чисто мнимым аргументом eit . Для этой функции имеет место равенство
eit = cost + isin t ,
называемое формулой Эйлера.
Докажем ее справедливость. Для этого рассмотрим функцию
|
|
|
|
z(t) = |
|
|
eit |
|
|
|
|
. |
|
|
|
||
|
|
|
|
cost + isin t |
|
|
|
||||||||||
|
Покажем сначала, что z(t) =const . Для этого найдем производную |
||||||||||||||||
|
|
′ |
ieit (cost + i sin t) − eit (−sin t + i cost) |
= |
|
||||||||||||
|
|
z (t) = |
|
|
(cost + i sin t)2 |
|
|
||||||||||
|
|
|
|
|
|
|
|
||||||||||
= |
eit (i cost + i |
2 sin t + sin t − i cost) |
= |
eit [(sin t − sin t) + i(cost − cost)] |
= 0 . |
||||||||||||
(cost + i sin t)2 |
|
|
|
|
|
|
|
|
|
(cost + i sin t)2 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Так как z (t) = 0 , то z(t) =const . Следовательно, если z(t) = x(t) +iy(t) , то |
||||||||||||||||
x(t) = C1 и y(t) = C2 . Найдем эти постоянные C1 и C2 . |
|
|
|||||||||||||||
|
Чтобы получить C1 и C2 , нужно найти значение z(t) при любом фикси- |
||||||||||||||||
рованном значении t , например, при t =0: |
|
|
|
|
|
|
|
||||||||||
|
|
|
z(0) = |
|
|
ei0 |
|
= |
|
|
1 |
=1. |
|
|
|||
Таким образом, |
|
|
cos0 |
+ isin 0 |
1 |
+ i0 |
|
|
|||||||||
|
|
|
|
|
|
|
|||||||||||
C1 + iC2 =1. Следовательно, |
z =1. Тогда |
|
|
||||||||||||||
eit |
=1 eit = cost + isin t . |
|
cost + isin t |
||
|
2.3.3.2. Свойства функции eit
1) eit1 eit2 = ei(t1+t2 ) .
33
2) |
eit1 |
= ei(t1−t2 ) . |
|
eit2 |
|||
|
|
3) Функция eit периодическая с периодом 2π. 4) eit =1.
5) (eit )′ =ieit .
6) (eit )n = eint .
7) Годограф функции eit – окружность единичного радиуса с центром в начале координат.
2.3.3.3. Показательная форма комплексного числа
Используя формулу Эйлера, можно из тригонометрической формы комплексного числа получить еще одну форму записи, называемую показатель-
ной.
z = r(cosϕ+isin ϕ) = reiϕ.
|
Пример. Записать число z = −2 3 + 2i в показательной форме. |
||||||||||
|
Решение. x = −2 3 < 0 , y = 2. Следовательно, |
|
|||||||||
|
|
|
|
r = (−2 3)2 + 22 = 12 + 4 = 16 = 4 , |
|
||||||
|
|
|
ϕ=arctg |
2 |
+ π= −arctg |
1 |
+ π= −π + π= |
5π , |
|||
|
|
|
−2 3 |
|
|
||||||
|
|
|
|
|
3 |
6 |
6 |
||||
|
|
|
|
|
|
|
5π |
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
z = 4e 6 . |
|
|
|||
|
2.3.3.4. Умножение и деление комплексных чисел в показательной форме, |
||||||||||
|
формула Муавра. Извлечение корня из комплексного числа |
||||||||||
|
Пусть имеются два комплексных числа, заданных в показательной форме: |
||||||||||
z |
= r eiϕ1 и |
z |
2 |
= r eiϕ2 . Рассмотрим, как выполняются некоторые алгебраические |
|||||||
1 |
1 |
|
2 |
|
|
|
|
|
|
|
|
операции над такими числами. При этом воспользуемся свойствами функции eit , рассмотренными на прошлой лекции.
1) Умножение.
34
z1z2 = r1eiϕ1 r2eiϕ2
2) Деление.
z1 = r1eiϕ1 z2 r2eiϕ2
=r1r2eiϕ1 eiϕ2 = r1r2ei(ϕ1+ϕ2 ) .
=r1 eiϕ1 = r1 ei(ϕ1−ϕ2 ) . r2 eiϕ2 r2
3) Возведение в целую степень.
Пусть z = reiϕ – комплексное число, n – целое число. Тогда
zn =(reiϕ )n = rn (eiϕ )n = rneinϕ .
Эта формула, записанная в виде (cosϕ+ isin ϕ)n = cos nϕ + isin nϕ, называ-
ется формулой Муавра.
4) Извлечение корня целой степени.
Корнем n -ой степени из комплексного числа z называется комплексное число, n -ая степень которого равна z . Следовательно
n z = w z = wn .
Пусть z = reiϕ и w =ρeiθ. Тогда reiϕ =ρneinθ. Два комплексных числа рав-
ны, если равны их модули, а аргументы отличаются на число, кратное 2π. То-
гда ρn = r , nθ=ϕ+ 2kπ, k . Следовательно, ρ = n r , |
θ = |
ϕ+ 2kπ |
. В резуль- |
|||
|
|
|
|
|
n |
|
тате получим формулу |
|
|
|
|
|
|
n reiϕ = n rei |
ϕ+2kπ |
|
|
|
||
n , k = |
|
|
|
|
|
|
0,n −1. |
|
|
|
|||
Корень n -ой степени из комплексного числа имеет n различных значений, так как, начиная с k = n , корни повторяются.
35
Тема 3. Аналитическая геометрия
3.1.Прямая на плоскости
3.1.1.Основные понятия аналитической геометрии. Прямоугольная декартова система координат
3.1.1.1.Прямоугольная декартова система координат
Одним из основных понятий аналитической геометрии является система координат.
Прямоугольная декартова система координат на плоскости образова-
на двумя взаимно-перпендикулярными осями (абсцисс и ординат) координат. Точка О – начало координат. Любой точке M на плоскости ставится в соответствие пара чисел (x, y) – координаты точки. В частности О(0,0). При этом
−∞ < x < ∞, − ∞ < y < ∞.
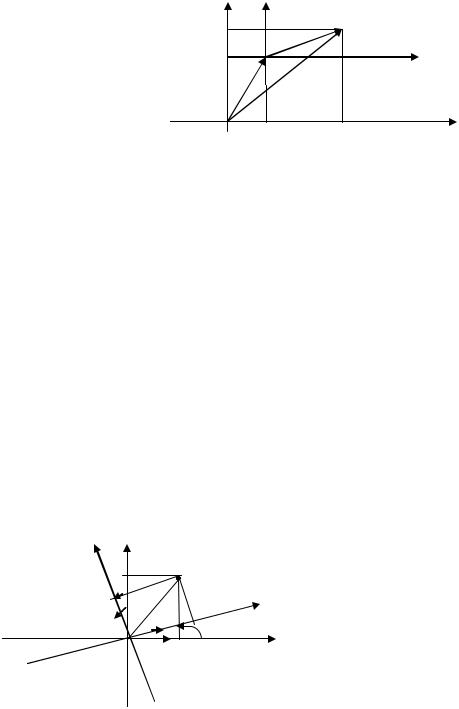
3.1.1.2. Преобразование координат при параллельном переносе и повороте осей
Рассмотрим на плоскости систему координат xOy. В некоторых задачах
на этой же плоскости необходимо ввести другую систему координат x′O′y′, ко-
торая определенным образом ориентирована относительно данной. Точка М, имеющая координаты (x, y) в первоначальной системе координат, имеет коор-
′ ′ |
системе. Возникает задача: получить связь между |
|||
динаты (x , y ) в новой |
||||
′ ′ |
|
|
|
|
(x , y ) и(x, y). |
|
|
|
|
1. Рассмотрим первое преобразование системы координат – параллель- |
||||
ный перенос. |
|
|
|
|
Пусть xOy - старая система координат. Новая система |
′ ′ |
′ |
получена |
|
x O y |
|
|||
из старой параллельным переносом осей координат, и M (x, y) |
координаты точ- |
|||
ки в старой системе, а M |
′ ′ |
|
|
|
(x , y ) - в новой системе. |
|
|
|
|
36
y |
y′ |
M |
|
y |
y ′ |
|
|
b |
|
|
|
|
x′ |
x′ |
|
О′ |
|
||
0 |
a |
x |
x |
РИС. 3.1.1
Пусть O′(a,b) – координаты нового начала координат в старой системе.
Построим |
три вектора |
|
′ |
|
′ |
|
|
|
Тогда |
OM = OO |
′ |
|
|
′ |
|
Так |
как |
|||||||||||
OO , |
|
O M , OM. |
|
|
+ O M . |
|||||||||||||||||||||||
′ |
′ |
′ |
|
′ |
=(a,b), |
OM |
=(x, y), то |
|
|
|
′ |
|
′ |
|
|
|
|
|
|
|
|
|||||||
O M =(x , y ), OO |
|
(x, y) = (a,b) + (x , y ). |
|
|
|
|
|
|
|
|||||||||||||||||||
|
Следовательно, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
x = a |
+ x′ |
|
x′ = x − a |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
= b |
+ y′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
y |
|
|
y′ = y − b |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
2. Рассмотрим второе преобразование системы координат – поворот осей |
|||||||||||||||||||||||||||
координат на угол α, при фиксированном начале координат. |
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
Пусть xOy - старая система координат. Новая система |
|
|
′ |
|
′ |
получена из |
|||||||||||||||||||||
|
|
x Oy |
|
|||||||||||||||||||||||||
старой поворотом осей Ox, Oy на угол α. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
y′ |
y |
|
|
|
|
|
|
|
Рассмотрим точку |
M , |
имеющую коорди- |
||||||||||||||||
|
|
|
α |
|
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
j |
|
|
|
|
|
|
наты (x, y) |
в системе |
xOy |
и координаты |
|||||||||||||||
|
|
|
|
|
x′ |
|
|
|
||||||||||||||||||||
|
|
y |
′ |
|
i |
|
|
|
|
′ |
′ |
|
|
′ |
′ |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
α |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
(x , y ) |
в системе x Oy . |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
0 |
i |
|
|
|
|
x |
|
Построим вектор OM . |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
РИС. 3.1.2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Тогда OM =(x, y) |
|
– в системе xOy, |
следовательно, разложение вектора по ба- |
|||||||||||||||||||||||||
зису на плоскости имеет вид OM = xi + yj, где i , j |
- орты в системе xOy. |
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
′ |
′ |
|
|
|
|
|
′ |
′ |
|
|
′ |
|
′ |
|
′ ′ |
|
′ |
|
′ |
- |
|
|
Аналогично OM =(x , y ) в системе |
x Oy , т.е. OM = x i |
|
+ y j , |
где i , j |
|
||||||||||||||||||||||
|
|
|
′ |
|
|
′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
орты в системе x Oy |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Отсюда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
′ |
′ |
|
′ ′ |
= xi + yj |
|
|
|
|
|
|
|
|
|
|
|
(15) |
||||
|
|
|
|
|
|
|
|
x i |
|
+ y j |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
37 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Если умножить равенство (15) скалярно сначала на |
′ |
′ |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
i |
, |
а затем на j , и |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
учесть, что |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
′ |
i |
′ |
= |
|
i |
′ |
|
2 |
=1, |
|
|
|
|
|
|
j |
′ |
|
j |
′ |
= |
|
j |
′ |
|
2 |
=1, j |
′ |
i |
′ |
= i |
′ |
j |
′ |
= 0 (i |
′ |
|
j |
′ |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
), |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
i i′= |
|
i |
|
|
|
|
i′ |
|
|
|
cos( |
|
i i′)=1 1 cosα =cosα, |
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
j i′ = |
|
j |
|
|
|
i′ |
|
cos(j i′) |
|
|
|
|
π |
|
|
|
= sin α, |
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
=1 1 cos |
|
− α |
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos(i , j′) |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
i |
j′= |
|
i |
|
|
|
|
j′ |
|
|
=1 1 cos |
π |
|
|
|
|
= −sin α, |
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
+ α |
|
|
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
j j′= |
|
|
|
|
j |
|
|
|
|
|
|
|
j′ |
|
cos(j, j′)=1 1 cosα = cosα, |
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
то можно получить |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x′ = x cosα + y sin α, |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y′ = −x sin α + y cosα. |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
3.1.2.Уравнения прямой на плоскости
3.1.2.1.Определения.
Поставим вопрос: какие данные относительно прямой определяют ее однозначно? Ответ на этот вопрос не единственный. Например, одну прямую можно провести через две точки; через точку параллельно другой прямой; через точку перпендикулярно другой прямой или, можно сказать, через точку в определенном направлении. Это направление может быть задано по-разному.
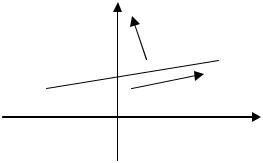
Введем два вектора, определяющие направление. |
|
|
|
1) |
Вектор S =(m,n) называется |
y |
|
|
|
|
|
направляющим вектором прямой l если он |
N |
l |
|
|
|
|
|
параллелен ей (лежит на ней); |
S |
|
|
2) |
вектор N = (A, B) называется нор- |
|
|
|
|
||
мальным вектором прямой l , если он пер- |
0 |
|
|
|
|
||
пендикулярен ей, то есть: S l, N l. |
РИС. 3.1.3 |
|
|
Найдем виды уравнения прямой, использующие векторы S, N. |
|
||
38
|
3.1.2.2. Уравнения прямой. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1. Дано: точка M 0 (x0 , y0 ) |
на прямой l и направляющий вектор S =(m,n). |
|||||||||||||
Найти уравнение прямой l. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
Пусть M (x, y) – произвольная точка |
||||||||||||
|
|
|
прямой |
l . Тогда |
M0M |
S – |
векторы |
||||||||
|
y |
S |
коллинеарны. |
|
|
|
|
|
|
||||||
|
|
|
Запишем условие |
коллинеарности |
|||||||||||
M 0 |
|
|
|
||||||||||||
|
M |
векторов |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
M0M =(x − x0 , y − y0 ) и S =(m,n) : |
||||||||||||
|
0 |
|
x |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
x − x0 |
= |
y |
− y0 |
|
|
|
|
(16) |
|||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
n |
|
|
||||
|
|
РИС. 3.1.4 |
|
|
|
|
m |
|
|
|
|
||||
|
Получили уравнение прямой, которое называется каноническим. |
|
|||||||||||||
|
2. Дано: точка M 0 (x0 , y0 ) |
на прямой l и нормальный вектор N = (A, B). |
|||||||||||||
Найти уравнение прямой. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
Если M (x, y) - произвольная точка пря- |
||||||||||||
y |
|
N |
мой l, то M0M N . |
|
|
|
|||||||||
|
|
|
|
|
|||||||||||
|
|
|
Записывая |
условие |
перпендикулярности |
||||||||||
|
M0 |
M |
векторов |
|
|
|
|
|
|
|
|
|
|||
|
|
l |
M0M =(x − x0 , y − y0 ) и N =(A, B), |
||||||||||||
|
|
|
|||||||||||||
0 |
|
|
x Получим второе уравнение прямой |
||||||||||||
|
|
|
|
|
|
(17) |
|||||||||
|
|
РИС. 3.1.5 |
|
A(x − x0 ) + B( y − y0 ) = 0 |
|||||||||||
которое называется уравнением с нормальным вектором.
3. Преобразуем каноническое уравнение прямой x −mx0 = y −n y0 к виду y − y0 = mn (x − x0 )
39

y |
l |
Отношение |
|
|
S |
|
|
n |
=tgα = k, |
n |
|
m |
||
α |
|
|
||
|
|
|
||
m где α – угол между прямой и положительным направлением оси Ox (угол наклона
0 |
x |
|
прямой к оси Ox). |
||
|
||
|
РИС. 3.1.6 |
Число k называется угловым коэффициентом прямой. Оно играет важную роль в математике и связано с понятием производной функции.
Уравнение прямой примет вид
y − y0 = k(x − x0 ) |
(18) |
и называется уравнением прямой, проходящей через данную точку в дан-
ном направлении.
4. Даны две точки M1(x1, y1), M 2 (x2 , y2 ) на прямой.
Найти ее уравнение. Тогда
|
S = M1M2 = (x2 − x1, y2 − y1) |
- направ- |
||||||||||
y |
ляющий вектор прямой. |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
||
|
Каноническое уравнение прямой примет |
|||||||||||
M2 |
вид |
|
|
|
|
|
|
|
|
|||
M1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
− x1 |
= |
y − y1 |
|
|
(19) |
||||
|
|
|
x |
|
|
|
|
|||||
|
|
|
− x |
y |
2 |
− y |
|
|
||||
|
x |
2 |
1 |
|
|
1 |
|
|
|
|||
0 |
|
|
|
|
|
|
|
|
|
|||
и называется уравнением прямой, про- |
||||||||||||
|
||||||||||||
РИС. 3.1.7 |
ходящей через две точки. |
|
||||||||||
5. Рассмотрим уравнение первой степени (называют линейным уравнени-
ем)
Ax + By +C =0.
Можно показать, что любое из уравнений прямой, полученных выше можно преобразовать к данному виду. Полученное уравнение прямой называется об-
щим уравнением прямой.
40