

080100Экономика(МатАнализ и ЛинАлгебра) / Лекции_Линейная_алгебра
.pdf1.3.Системы линейных алгебраических уравнений
1.3.1.Системы линейных алгебраических уравнений
1.3.1.1.Определения
Зададим систему из n линейных уравнений с n неизвестными
a |
x |
+ |
+a |
x |
= h , |
|
|
11 |
1 |
|
1n |
n |
1 |
|
|
|
|
|
|
(3) |
a |
x |
+ |
+a |
x |
= h . |
|
|
n1 |
1 |
|
nn |
n |
n |
Числа aij , называемые коэффициентами системы (3), заданы. Будем еще говорить, что система (3) определяется матрицей
a |
a |
|
|
|
|
11 |
1n |
|
|
A = |
|
|
|
(4) |
a |
a |
|
|
|
|
n1 |
nn |
|
|
ее коэффициентов.
Нас будет интересовать вопрос о разрешимости системы (3) для каждой системы чисел (h1,...,hn ) .
Система чисел (x1,..., xn ) называется решением системы уравнений (3),
если числа xi удовлетворяют этим уравнениям.
1.3.2.Метод Крамера решения систем линейных уравнений
1.3.2.1.Метод Крамера
Если определитель матрицы A не равен нулю:
|
|
|
|
a11 |
a1n |
= |
|
A |
|
= |
≠ 0 , |
|
|
an1 ann
то система (3) для любой системы чисел (h1,...,hn ) имеет единственное реше-
ние, вычисляемое по формулам Крамера2:
x = i |
(i = |
1,n |
) . |
(5) |
i |
|
|
|
|
2 Г. Крамер (1704—1752) — швейцарский •математик. 11
Здесь i – определитель, получаемый из определителя |
, если в нем за- |
|||||||||||||||||
менить числа i -го столбца соответственно на числа h1, …, hn : |
|
|||||||||||||||||
|
|
i = |
|
a1 1 |
a1 i−1 h1 a1 i+1 |
|
|
a1 n |
|
. |
|
|
(6) |
|||||
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
an 1 |
an i−1 hn an i+1 |
|
|
an n |
|
|
|
|
|
|||
Пример 8. |
Пример |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Решить по методу Крамера систему |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
2x − y = 4, |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
= −3. |
|
|
|
|
|
|
|
|
||
Решение. |
|
|
|
|
|
x + 2 y |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Находим определители |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
= |
|
2 −1 |
|
= 5, |
x = |
|
4 −1 |
|
y = |
|
2 4 |
|
= −10 . |
|
||||
|
|
|
= 5. |
|
|
|
||||||||||||
|
|
1 2 |
|
|
|
|
|
|
−3 2 |
|
|
|
1 − 3 |
|
|
|
||
Отсюда, x = 55 =1, y = −510 = −2 – решение системы.
1.3.3. Матричный метод решения систем линейных уравнений
Существует метод решения системы линейных уравнений
a |
x |
+ |
+a |
x |
= h , |
||
|
11 |
1 |
|
1n |
n |
1 |
(7) |
|
|
|
|
|
|
|
|
a |
x |
+ |
+a |
x |
= h |
, |
|
|
n1 |
1 |
|
nn |
n |
n |
|
основанный на использовании обратной матрицы. Этот метод называется мат-
ричным методом.
Рассмотрим этот метод на примере системы трех уравнений
a x + a y + a z = h , |
|
|||
11 |
12 |
13 |
1 |
|
a21x + a22 y + a23 z = h2 , |
(8) |
|||
a x + a y + a z = h . |
|
|||
31 |
32 |
33 |
3 |
|
Данный метод состоит из следующих этапов: 1. Составим три матрицы
a11 |
a12 |
a13 |
|
|
|
A = a |
21 |
a |
a |
|
, |
|
22 |
23 |
|
|
|
a |
a |
a |
|
|
|
|
31 |
32 |
33 |
|
|
h1 |
|
|
x |
|
|
H = h |
|
, |
X = y |
. |
|
|
2 |
|
|
|
|
h |
|
|
z |
|
|
|
3 |
|
|
|
|
12

Назовем A – матрицей системы, H – матрицей свободных членов, X – матрицей решений.
Система уравнений запишется в матричном виде
A X = H .
2. Пусть A – невырожденная матрица. Тогда найдем обратную матрицу
A−1 .
3. Найдем матрицу решений по формуле
X = A−1 H .
Эта формула следует из рассуждений
AX = H A−1 AX = A−1H EX = A−1H X = A−1H.
Пример 9. Решить матричным методом систему
x |
+ 2z = −5, |
|
− y + 3z = −10, |
2x |
|
|
y + 2z = −2. |
|
Решение.
1. Составим три матрицы
|
1 0 2 |
|
−5 |
|
x |
|||
|
2 −1 3 |
|
|
−10 |
|
, |
|
|
A = |
|
, H = |
|
X = y . |
||||
|
0 1 2 |
|
|
−2 |
|
|
|
|
|
|
|
|
|
z |
|||
изапишем систему в виде AX = H.
2.Найдем обратную матрицу (см. пример из прошлой лекции): а) Найдем определитель матрицы
|
|
|
|
|
|
|
|
|
|
A |
|
|
1 |
0 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
= |
2 −1 3 |
= −2 + 4 −3 = −1. |
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б) Найдем алгебраические дополнения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
A = + |
|
−1 3 |
|
= −5 , |
A |
= − |
|
2 3 |
|
= −4 , A |
|
= + |
|
2 −1 |
|
= 2 , |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
11 |
|
|
|
1 |
2 |
|
|
|
|
|
|
|
|
|
|
12 |
|
|
|
|
|
|
|
0 2 |
|
|
|
13 |
|
|
|
|
|
0 |
1 |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
A = − |
|
0 2 |
|
= 2 , |
A |
= |
|
1 2 |
|
= 2 , A |
= − |
|
1 0 |
|
|
= −1, |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
21 |
|
|
|
|
|
1 2 |
|
|
|
|
|
22 |
|
|
|
0 2 |
|
|
|
|
|
|
23 |
|
|
|
|
0 1 |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
A |
= |
|
0 2 |
|
= 2 , |
A |
= − |
|
1 2 |
|
=1, |
A |
|
= |
|
1 0 |
|
|
= −1. |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
31 |
|
|
|
−1 3 |
|
|
32 |
|
|
2 3 |
|
|
|
|
33 |
|
|
2 −1 |
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
13 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||

и составим матрицу |
|
|
|
|
|
|
−5 −4 |
2 |
|
||
|
|
2 |
2 |
|
|
A = |
−1 . |
||||
|
|
2 |
1 |
|
|
|
|
−1 |
|||
в) Найдем транспонированную матрицу |
|||||
|
−5 |
2 |
2 |
|
|
T |
|
−4 |
2 |
1 |
|
A |
= |
. |
|||
|
|
2 |
−1 |
|
|
|
|
−1 |
|||
г) Найдем обратную матрицу |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
1 |
|
−5 2 2 |
5 −2 −2 |
|
|||||||
A |
−1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
−4 2 1 |
= |
4 −2 −1 |
. |
|||||||
|
−1 |
|||||||||||||||
|
|
|
|
|
2 |
|
|
−2 1 1 |
|
|
||||||
|
|
|
|
|
|
|
|
−1 −1 |
|
|
||||||
3. Найдем матрицу решений |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
5 −2 −2 |
−5 |
|
−1 |
||||
X = A |
−1 |
H |
|
|
|
|
−10 |
|
|
|
2 |
|
||||
|
|
= |
4 −2 −1 |
|
= |
|
. |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
−2 |
|
|
−2 |
|
|
|
|
|
|
|
|
|
|
|
−2 1 1 |
|
|
|
||||
Ответ: x = −1, y = 2, z = −2 – решение системы.
1.3.4. Метод Гаусса решения систем линейных уравнений
Рассмотрим еще один метод решения систем линейных уравнений, основанный на использовании матриц – метод Гаусса (метод исключения неизвестных). Рассмотрим его на примере системы трех уравнений.
Метод Гаусса решения системы
a11x + a12 y + a13 z = h1,a21x + a22 y + a23 z = h2 ,a31x + a32 y + a33 z = h3.
состоит из следующих этапов:
1. Составим расширенную матрицу
ных членов
|
|
a11 |
a12 |
a13 |
|
|
= a |
a |
a |
A |
||||
|
|
21 |
22 |
23 |
|
|
a |
a |
a |
|
|
31 |
32 |
33 |
системы, добавив столбец свобод-
h1 h2 .
h3
14
2. Преобразуем матрицу A к треугольному виду с помощью элементарных преобразований строк
|
|
a11 a12 a13 |
|
h1 |
|
|
b11 b12 b13 |
|
g1 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|||||||||||
|
|
= a |
a |
a |
|
h |
|
|
|
0 |
b b |
|
g |
|
|
= |
|
. |
|
A |
|
|
2 |
B |
|||||||||||||
|
|
21 22 23 |
|
2 |
|
|
|
|
22 23 |
|
|
|
|
|
|
|||
|
|
a |
a |
a |
|
h |
|
|
|
0 |
0 b |
|
g |
|
|
|
|
|
|
|
31 32 33 |
|
3 |
|
|
|
|
33 |
|
|
3 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||||||||||
3. Запишем систему линейных уравнений, соответствующих матрице B
b x + b y + b z = g , |
||||
|
11 |
12 |
13 |
1 |
|
|
b22 y + b23 z = g2 , |
||
|
|
|
b33 z = g3 |
|
|
|
|
||
и решим ее. Решение этой системы является также решением заданной системы.
Пример 10. Решить методом Гаусса систему уравнений
x |
+ 2z = −5, |
|
|
2x − y + 3z = −10, |
|
|
y + 2z = −2. |
|
|
Решение. Составим расширенную матрицу и преобразуем ее к треугольному виду
|
|
1 0 2 |
|
−5 |
1 0 2 |
|
−5 |
1 0 |
2 |
|
−5 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
−1 3 |
|
−10 |
0 −1 −1 |
|
0 |
0 −1 −1 |
|
0 |
= B . |
|||||||||
A = |
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
0 |
1 2 |
|
−2 |
|
|
0 1 2 |
|
−2 |
|
|
0 0 |
1 |
|
−2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
||||||||||||||
Запишем систему с расширенной матрицей B и решим ее
x |
+ 2z = −5, |
z = −2, |
|
− y − z = 0, |
y = −z = 2, |
|
||
|
z = −2, |
x = −5 − 2z = −1. |
|
||
Ответ: Совокупность x = −1, |
y = 2, z = −2 – решение системы. |
|
15

Тема 2. Векторная алгебра
2.1. Векторы. Линейные операции над векторами
Понятие вектора возникло в XIX в. в связи с потребностями механики и физики. Основы векторного исчисления заложены английским математиком Гамильтоном и немецким математиком Грассманом.
2.1.1. Векторы. Линейные операции над векторами. Проекция вектора на ось
2.1.1.1. Определения
Вектором называется отрезок, которому приписано определенное направление, т.е. указаны начало и конец отрезка.
B
a
|
Обозначается: a или AB , где |
A |
A – начало, B – конец вектора. |
|
РИС. 2.1.1
Модулем (длиной) вектора называется длина отрезка и обозначается
a , AB
Вектор, модуль которого равен нулю, называется нулевым вектором 0 . Нулевой вектор направления не имеет.
Вектор, модуль которого равен единице, называется единичным векто-
ром или ортом e направления, указанного этим вектором.
Векторы называются компланарными, если они лежат в одной плоскости или параллельны ей.
Векторы называются коллинеарными, если они лежат на одной прямой или на параллельных прямых. Обозначается a b .
16
При этом коллинеарные векторы могут быть одинаково направленны-
ми, обозначается a ↑↑ b (Рис. 2.1.2) или противоположно направленными,
обозначается a ↑↓ b (Рис. 2.1.3).
a |
b |
a |
b |
||||||
|
|
|
|
|
Рис. 2.1.2 |
|
РИС. 2.1.3 |
||
Векторы a и b |
равны a =b, если: |
|
|
||||||
|
|
a |
|
|
|
|
|
|
|
1) |
|
|
= |
b |
, |
2) a ↑↑ b. |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
Из этого определения следует, что при параллельном переносе вектора, получается вектор, равный исходному. Поэтому начало вектора можно помещать в любую точку пространства, а вектор называют свободным.
В некоторых науках рассматриваются также скользящие векторы, которые можно перемещать вдоль прямой и связанные векторы, начало которых фиксировано.
2.1.1.2. Линейные операции над векторами
Введем линейные операции над векторами.
1. Суммой векторов a и b называется вектор a + b, для построения ко-
торого существует два правила:
а) правило треугольника: a + b лежит на стороне треугольника, постро-
енного на векторах a, b, имеет начало, совпадающее с началом вектора a, а
конец в конце вектора b (Рис. 2.1.4);
б) правило параллелограмма: a + b – диагональ параллелограмма, по-
строенного на векторах a, b, как на сторонах (Рис. 2.1.5).
17
b
a
|
a +b |
a +b |
b |
|
|
|
a |
РИС. 2.1.4 |
РИС. 2.1.5 |
Свойства:
a + b = b + a ,
(a + b )+ c = a + (b + c ).
2.Суммой нескольких векторов a + b + c + d называется вектор, который строится по правилу многоугольника: это вектор, замыкающий ломаную линию, составленную из слагаемых векторов.
b
c
a
 d a +b +c + d
d a +b +c + d
РИС. 2.1.6
3. Разностью векторов a и b называется вектор a −b = a +(−1)b, кото-
рый можно построить следующим образом:
a −b
b
a
РИС. 2.1.7
4. Произведением вектора a на число λ называется вектор, удовлетворяющий условиям:
18
1)λ a = λ a
2)λ a ↑↑ a если λ > 0 , λ a ↑↓ a если λ < 0 .
Пример 11.
a |
1 |
a |
−a |
|
|||
|
2 |
|
РИС. 2.1.8
Свойства:
λ(a +b )=λa + λb , (λ +μ)a =λa +μa , λ(μa)=(λμ)a .
2.1.1.3. Проекция вектора
Пусть дан вектор AB и ось Ou (прямая с направлением, заданным ортом e и началом координат O ) (Рис. 2.1.9).
Найдем проекции точек A и B на ось Ou - это точки A′, B′.
′ |
′ |
. |
|
|
Построим вектор A B |
|
|
||
|
|
|
B |
|
|
|
A |
|
|
|
e |
|
|
|
0 |
|
A′ |
B′ |
u |
|
|
РИС. 2.1.9 |
|
|
Проекцией вектора AB на ось Ou называется число
|
|
|
|
′ ′ |
|
|
если |
′ ′ |
↑↑e, |
|
|
|
|
||||||
|
|
|
|
A B |
|
|
A B |
||
ПрOu AB = |
|
|
|
A′B′ |
|
|
если |
A′B′↑↓e. |
|
|
|
|
|||||||
− |
|
|
|
||||||
|
|
|
|
|
|
|
|
||
19
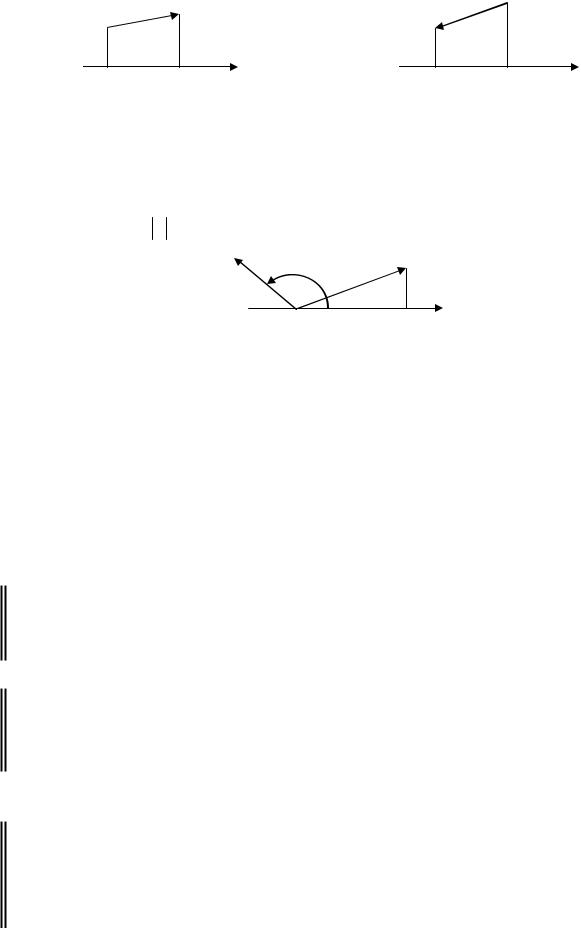
Пример 12.
|
B1 |
|
|
A2 |
A1 |
|
B |
|
|
|
|
|
2 |
|
0 |
u |
0 |
1 |
u |
1 |
3 |
|
4 |
|
ПрOu A1B1 = 2. |
|
ПрOu A2 B2 = −3. |
||
|
РИС. 2.1.10 |
|
|
РИС. 2.1.11 |
Свойства проекций вектора
1. ПрOu a = a cosα.
a
 α
α
0 ПрOu a u
РИС. 2.1.12
2.ПрOu (a ± b )= ПрOu a ± ПрOub .
3.ПрOu λa = λПрOu a .
2.1.2. Линейная зависимость и независимость векторов. Базис. Разложение вектора по базису. Координаты вектора
2.1.2.1. Линейная зависимость и независимость векторов
Система векторов a, b, c называется линейно зависимой, если один век-
тор можно выразить как линейную комбинацию других.
|
a =λ1b + λ2c. |
Система векторов a, b, c |
называется линейно независимой, если равен- |
ство λ1a + λ2b + λ3c = 0 выполняется только при λ1 = λ2 = λ3 = 0. |
|
2.1.2.2. Базис. Разложение вектора по базису. Координаты вектора |
|
Базисом в пространстве |
3 называются любые 3 некомпланарные векто- |
ра, взятые в определенном порядке. |
|
Базисом на плоскости |
2 называются любые 2 неколлинеарные вектора, |
|
20 |