

1.40 Примеры вычислений потенциальной энергии. Полная энергия________________
Конкретный вид функции П зависит от характера силового поля.
Потенциальная энергия тела массой т на высоте h_________________________________________________
Э![]() то
выражение вытекает из того, что
потенциальная энергия равна работе
силы тяжести при падении тела с высотыh
на поверхность
Земли.
то
выражение вытекает из того, что
потенциальная энергия равна работе
силы тяжести при падении тела с высотыh
на поверхность
Земли.
Высота Л отсчитывается от нулевого уровня, для которого П0 = 0, g — ускорение свободного падения.
Поскольку начало отсчета выбирается произвольно 1.38, то потенциальная энергия может иметь отрицательное значение (кинетическая энергия всегда положительна!). Если принять за нуль потенциальную энергию тела, лежащего на поверхности Земли, то потенциальная энергия тела, находящегося на дне шахты (глубина Л'), П = -mgh'.
Потенциальная энергия упруго деформированного тела (пружины)___________________________________
Э![]() то
выражение получается из того, что работа
силы при деформации пружины идет на
увеличение потенциальной энергии
пружины.
то
выражение получается из того, что работа
силы при деформации пружины идет на
увеличение потенциальной энергии
пружины.
Элементарная работа dA, совершаемая силой Fx при бесконечно малой деформации dx, dA = Fx dx = kx dx (Fx = -F x упр = -(-kx) = kx).
Полная работа
![]() .
.
[k — коэффициент упругости (для пружины — жесткость); Fх упр =- kx - проекция силы упругости на ось х; Fх упр направлена в сторону, противоположную деформации x. По третьему закону Ньютона деформирующая сила равна по модулю силе упругости и противоположно ей направлена]
Полная механическая энергия системы___
![]() Энергия
механического движения и взаимодействия,
т. е. равна сумме кинетической и
потенциальной энергий.
Энергия
механического движения и взаимодействия,
т. е. равна сумме кинетической и
потенциальной энергий.
1.3.3. Закон сохранения энергии
1.41 Закон сохранения механической энергии_
Исходные данные_____________________________________________________________________________________________
Рассматривается
система материальных точек массами
т1,
т2,
... , тп,
движущихся
со скоростями
![]() .
.
Второй закон Ньютона для каждой из материальных точек________________________________________________________
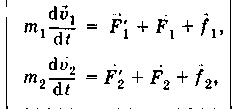 [
[![]() —
равнодействующие внутренних
консервативных сил,
действующих на каждую из этих точек;
—
равнодействующие внутренних
консервативных сил,
действующих на каждую из этих точек;
![]() —равнодействующие
внешних сил,
которые считаются консервативными;
—равнодействующие
внешних сил,
которые считаются консервативными;
![]()
![]() —равнодействующие
внешних
неконсервативных сил,
действующие на каждую из материальных
точек]
—равнодействующие
внешних
неконсервативных сил,
действующие на каждую из материальных
точек]
Учет перемещений точек под действием сил_____________________________________________________________________
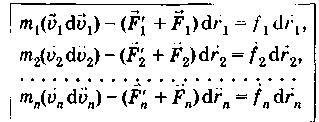 Точки
движутся под действием сил, поэтому за
время dt
совершают
перемещения
Точки
движутся под действием сил, поэтому за
время dt
совершают
перемещения
![]() .
Каждое уравнение второго закона Ньютона
умножено скалярно на соответствующее
перемещение, и учтено, что
.
Каждое уравнение второго закона Ньютона
умножено скалярно на соответствующее
перемещение, и учтено, что![]() .
.
После сложения уравнений
![]()
Правая часть равенства определяет работу внешних неконсервативных сил, действующих на систему.
Элементарное приращение кинетической энергии__________________________________________________________________
![]() Первый
член равенства (*) равен элементарному
приращению кинетической энергии dT
системы 1.37.
Первый
член равенства (*) равен элементарному
приращению кинетической энергии dT
системы 1.37.
Элементарное приращение потенциальной энергии системы________________________________________________________
![]() Второй
член равенства (*) равен элементарной
работе внутренних и внешних
консервативных сил, взятой со знаком
«минус», т. е. равен элементарному
приращению потенциальной энергии dП
системы 1.39.
Второй
член равенства (*) равен элементарной
работе внутренних и внешних
консервативных сил, взятой со знаком
«минус», т. е. равен элементарному
приращению потенциальной энергии dП
системы 1.39.
Изменение полной механической энергии системы___________________________________________________________________
Р![]() авно
работе внешних неконсервативных сил,
действующих на систему.
авно
работе внешних неконсервативных сил,
действующих на систему.
Правая часть равенства (*) задает dA.
В случае отсутствия внешних неконсервативных сил
И![]() з
записанного равенства следует, чтоТ
+ П = Е
= const.
з
записанного равенства следует, чтоТ
+ П = Е
= const.