

Анализ потенциальной кривой для упругодеформированного тела
![]()
З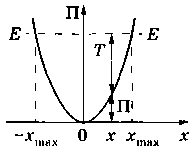 ависимость
потенциальной энергии упругой деформации от деформациих —потенциальная
кривая — имеет вид параболы. График
заданной полной энергии телаЕ —
прямаяЕЕ, параллельная осих.
ависимость
потенциальной энергии упругой деформации от деформациих —потенциальная
кривая — имеет вид параболы. График
заданной полной энергии телаЕ —
прямаяЕЕ, параллельная осих.
Потенциальная энергия П при деформации х определяется отрезком вертикали, заключенным между точкойх на оси абсцисс и потенциальной кривой.
Кинетическая энергия Т при деформациих задается ординатой между потенциальной кривой и горизонтальной прямойЕЕ.
С возрастанием деформации х потенциальная энергия тела возрастает, а кинетическая — уменьшается.
31
♦ Абсцисса хтях определяет максимально возможную деформацию растяжения тела, аxmax— максимально возможную деформацию сжатия тела.
♦![]() Еслих = ±хшах, тоT=
0ит. е. потенциальная
энергия становится
Еслих = ±хшах, тоT=
0ит. е. потенциальная
энергия становится
максимальной и равной полной энергии.
♦ При полной энергии тела, равной Е,
тело не может сместиться правееxmax
и левее -хтax,
так как кинетическая энергия не может
быть отрицательной и, следовательно,
потенциальная энергия не может быть
больше полной энергии. В таком случае
говорят, что тело находится впотенциальной
яме с координатами –xmax
![]() х
х
![]() xmax.
xmax.
1.45 Анализ потенциальной кривой (общий случай)
Исходные данные
Рассматривается одномерное движение тела (потенциальная энергия — функция лишь одной переменной (например, координатых)).
Рассматриваются только консервативные системы (в них механическая энергия превращается только в механическую).
Анализ потенциальной кривой произвольной формы___________________________
В общем случае потенциальная кривая
может иметь достаточно сложный вид,
например с несколькими чередующимися
максимумами и минимумами (см. рисунок).
общем случае потенциальная кривая
может иметь достаточно сложный вид,
например с несколькими чередующимися
максимумами и минимумами (см. рисунок).
График заданной полной энергии частицы — прямая ЕЕ, параллельная осих.
Частица может находиться только там, где П(х)
 Е, т. е. в областяхIиIII.
Е, т. е. в областяхIиIII.Переходить из области IвIIIи обратно частица не может, так как ей препятствуетпотенциальный барьер CDG, ширина которого равна интервалу значенийх, при которыхЕ < П, а его высота определяется разностью Пmax-Е. Для того чтобы частица смогла преодолеть потенциальный барьер, ей необходимо сообщить дополнительную энергию, равную высоте барьера или превышающую ее.
В области Iчастица с полной энергиейЕ оказывается «запертой» в потенциальной ямеABC и совершает колебания между точками с координатами хА и хс.
При смещении частицы из положения x0(и влево, и вправо) она испытывает действие возвращающей силы, поэтому положениех0 являетсяположением устойчивого равновесия. Указанные условия выполняются и для точких'0 (для Пmах). Однако эта точка соответствуетположению неустойчивого равновесия, так как при смещении частицы из положениях'0 появляется сила, стремящаяся удалить ее от этого положения.
1.3.5. Удар абсолютно упругих и неупругих тел
1.46 Общие понятия_______________
Удар (соударение)_________________________________
Столкновение двух или более тел, при котором взаимодействие длится очень короткое время.
Примеры: столкновение бильярдных шаров, удар человека о землю при прыжке с поезда и т. д.Система тел в процессе соударения — замкнутая система_____________________________________________
Силы взаимодействия между сталкивающимися телами (ударные или мгновенные силы) столь велики, что внешними силами, действующими на них, можно пренебречь. Это позволяет систему тел в процессе их соударенияприближенно рассматривать какзамкнутую систему и применять к ней законы сохранения.
Сущность удара_____________________________________
Кинетическая энергия относительного движения соударяющихся тел на короткое время преобразуется в энергию упругой деформации. Во время удара имеет место перераспределение энергии между соударяющимися телами. Наблюдения показывают, что относительная скорость тел после удара не достигает своего прежнего значения. Это объясняется тем, что нет идеально упругих тел и идеально гладких поверхностей.
Коэффициент восстановления_____________
О![]() тношениенормальных составляющих относительной
скорости тел после(
тношениенормальных составляющих относительной
скорости тел после(![]() )
и до (Vn)
удара.
)
и до (Vn)
удара.
Т![]() акие
тела —абсолютно неупругие
(см. также1.3).
акие
тела —абсолютно неупругие
(см. также1.3).
Такие тела — абсолютно упругие (см. также1.3).
Примеры: для стальных шаров ε ≈ 0,56; для слоновой кости ε ≈ 0,89; для свинца ε ≈ 0.
Линия удара__________________________________________
Прямая, проходящая через точку соприкосновения тел и нормальная к поверхности их соприкосновения.
Центральный удар_____________________________________
Удар, при котором тела до удара движутся вдоль прямой, проходящей через их центры масс.