

StrMech-КРАТКО_2011_часть_2
.pdfБольшинство эпюр, встречающихся в практике инженерных расчетов, могут быть разбиты на простейшие по форме фигуры: прямоугольник, треугольник, трапеция, параболический треугольник. Для них величина площади Ω и положение центра тяжести Ñ известны (рисунок 6.7).
Рисунок 6.7
6.4.2 Использование формулы Симпсона. Пусть подынтегральная функция f(z) представлена в виде произведения f(z) = f1(z) f2 (z) (рисунок 6.8). Допустим, на участке длиной l необходимо вычислить следующий интеграл: 



I = ∫l f1 f2 dz .
0
Обозначим через a, b, e ординаты эпюры f1(z) в крайних и средней точках участка; через c, d, g – аналогичные ординаты эпюры f2 (z) (см. рисунок 6.15). Тогда
I = ∫l |
f1 f2 dz = |
l |
(ac + 4eg +bd). |
(6.10) |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
||||||
6 |
|||||||||||
0 |
|
|
|
Рисунок 6.8 |
|||||||
Формула Симпсона (6.10) дает точный результат, если обе функции f1(z), f2 (z) линейные èëè îäíà íèõ линейная, а вторая – квадратичная. При этом длина участка l может быть достаточно большой. Заметим, что если перемножаемые ординаты находятся по разные стороны от оси, их произведение отрицательно.
6.4.3 Правило перемножения прямолинейных эпюр (трапеций). В частном случае, когда обе перемножаемые эпюры f1(z) è
А. В. Яровая Курс лекций по строительной механике. Часть 2 |
11 |

f2 (z) линейные (рисунок 6.9), их средние ординаты выражаются че- рез крайние следующим образом:
e = |
a + b |
; g = |
c + d |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Подставив эти выражения в (6.10), |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
получим: |
I = ∫l |
f1 f2 dz = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
l |
(2ac +2bd +ad +bc). (6.11) |
Рисунок 6.9 |
6 |
|||
|
|
|
6.4.4 Применимость способов «перемножения эпюр». Рассмотренные способы «перемножения эпюр» применимы к любому интегралу, для которого подынтегральная функция может быть представлена в виде произведения двух функций f1 è f2, в том числе к любому из интегралов Мора.
Äëÿ прямолинейных участков постоянной жесткости под функциями f1 è f2 могут пониматься изгèáающие моменты в «груçовом» и «единичном» сîñтояниях Mp , M , продольные силы Np , N , поперечные силы Qp , Q и т. п. Постоянная жесткость (EJ, EA, GA и т. д.) выносится за знак каждого интеграла Мора, а затем произведение эпюр делится на нее.
Сложные эпюры обычно разбиваются на участки, в пределах которых они перемножаются по одной из формул (6.9), (6.10), (6.11), а затем результаты суммируются. Для разных участков можно использовать как один и тот же, так и разные способы.
12 |
А. В. Яровая Курс лекций по строительной механике. Часть 2 |

7Метод сил и его применение к расчету плоских рам и балок
7.1Статически неопределимые системы и их свойства
7.1.1Степень статической неопределимости. Напомним, что
статически неопределимыми называются системы, в которых не
все усилия (реакции опорных и внутренних связей) могут быть найдены из уравнений статического равновесия, так как количе- ство неизвестных превышает количество независимых уравнений статики.
Статически неопределимые системы содержат больше связей, чем необходимо для их геометрической неизменяемости. Напомним, что избыточными, èëè лишними называются связи, которые можно удалить из конструкции без нарушения ее геометри- ческой неизменяемости; абсолютно необходимыми – связи, удаление которых ведет к изменяемости системы.
Степенью статической неопределимости системы nñ называется разность между количеством неизвестных усилий и количе- ством независимых уравнений равновесия. Она равна общему количеству лишних связей, устранение которых делает конструкцию статически определимой.
Если лишними являются опорные связи, система называется внешне статически неопределимой. Если лишними являются связи, соединяющие части самой конструкции (внутренние связи), то система является внутренне статически неопределимой.
Рассмотрим балку (рисунок 7.1, à). В ее опорах возникает ÷å- òûðå реакции, знание которых позволит найти внутренние усилия во всех сечениях. Однако для определения реакций можно составить только òðè независимых уравнения статического равновесия. Следовательно, nñ = 4 – 3 = 1, т. е. балка один раз статически неопределима.
Рисунок 7.1
Степень статической неопределимости nñ можно найти иначе. Известно, что для неизменяемого присоединения балки к земле
А. В. Яровая Курс лекций по строительной механике. Часть 2 |
13 |

достаточно лишь жесткой заделки, или шарнира и стержня (рисунок 7.1, á). Отбрасывание одной лишней связи (удаление вертикального стержня либо замена заделки шарниром) превращает систему в статически определимую, содержащую минимально необходимое количество связей. Поэтому nñ = 1.
7.1.2 Формулы для вычисления степени статической неопределимости. Удобнее для вычисления степени статической неопределимости nñ пользоваться аналитическими выражениями.
1) Произвольные плоские стержневые системы. Степень статической неопределимости nñ плоской стержневой системы численно равна степени изменяемости (числу степеней свободы), взятой с обратным знаком:
nc = −W .
Выделяются диски, анализируется их соединение друг с другом и с основанием. По формуле Чебышева (1.2)
nc = 2Ø + ÑÎ − 3Ä , |
(7.1) |
ãäå Ø – количество шарниров с учетом кратности; ÑÎ – количе- ство одиночных связей (стержней); Ä – количество дисков.
Заметим, что формула (7.1) справедлива только в случаях, когда каждый диск является внутренне статически определимой системой (не содержит лишних связей). Если имеются жесткие соединения дисков между собой или с основанием, то их необходимо представлять в виде трех одиночных стержней или использовать соотношение, полученное из (1.3):
nc = 3Æ + 2Ø + ÑÎ − 3Ä ,
ãäå Æ – количество жестких соединений дисков или заделок.
2) Рамы, содержащие замкнутые контуры. Рассмотрим раму, имеющую бесшарнирный замкнутый контур (рисунок 7.2, à). Она внешне статически определима – три опорные реакции можно определить из трех уравнений равновесия.
Рисунок 7.2
14 |
А. В. Яровая Курс лекций по строительной механике. Часть 2 |
Однако данная рама внутренне статически неопределима, так как внутренние силы и моменты в замкнутом контуре из уравнений равновесия невозможно найти. В сечениях любого элемента, вырезанного из контура, возникает шесть неизвестных усилий (рисунок 7.2, á), для определения которых òðåõ уравнений статики недостаточно. Следовательно, nñ = 6 – 3 = 3.
Введем простой шарнир в замкнутый контур (рисунок 7.2, â). Этим мы устраним одну связь, препятствующую взаимному повороту частей системы, и увеличим количество независимых уравнений равновесия на единицу (кроме трех уравнений статики для вырезанного элемента добавляется уравнение моментов его левой или правой части относительно шарнира).
Если в системе присутствует Ê бесшарнирных замкнутых контуров, то лишних связей будет 3Ê. Так, переходя от рамы, имеющей три бесшарнирных замкнутых контура (рисунок 7.3, à), к статически определимой системе (рисунок 7.3, á), устанавливаем, что рама девять раз статически неопределима.
Таким образом, каждый бесшарнирный замкнутый контур, независимо от его формы и расположения в системе, имеет три лишние связи – трижды статически неопределим. Введение одного простого шарнира уменьшает степень статической неопределимости на единицу. С учетом этого
nc = 3Ê −Ø , |
(7.2) |
ãäå Ê – количество замкнутых контуров; Ø – количество шарниров с учетом кратности.
Формулой (7.2) можно пользоваться не только для рам, но и для любых стерж-
невых систем – балок, арок и т. п. Замкнутые контуры могут образовываться элементами системы вместе с опор-
ными стержнями. В этом случае шарниры, принадлежащие опорным стержням, с учетом их кратности вклю- чаются в количество Ø.
3) Шарнирно-стержневые системы (фермы). Для них удобно
использовать зависимость, полученную из (1.4): |
|
nc = ÑÎ −2Ó , |
(7.3) |
ãäå ÑÎ – количество одиночных связей (стержней фермы и опорных стержней); Ó – количество узлов, не связанных с землей.
А. В. Яровая Курс лекций по строительной механике. Часть 2 |
15 |

7.1.3Свойства статически неопределимых систем.
Статически неопределимые системы более жесткие, чем аналогичные статически определимые. При одной и той же нагрузке перемещения и деформации, а, значит, внутренние усилия и напряжения в них меньше. Сравните, например, значения изгибающих моментов в балках, изображенных на рисунке 7.4.
Рисунок 7.4
Система, содержащая лишние связи, сохраняет свою геометрическую неизменяемость и после потери этих связей. В то же время удаление хотя бы одной связи в статически определимой системе приводит к ее изменяемости.
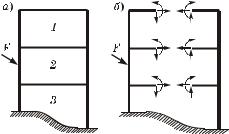
Изменение температуры, осадка опор –кинематическое воздействие (рисунок 7.5), неточность изготовления и сборки элементов вызывают в статически неопределимых системах появление дополнительных внутренних усилий. В статически определимых системах указанные факторы вызывают только перемещения сечений, силы и моменты при этом не возникают.
Рисунок 7.5
Усилия в статически неопределимых системах, возникающие от внешней нагрузки, зависят от соотношений жесткостей отдельных элементов, а усилия, вызванные температурным и кинематическим воздействиями – от самих значений жесткостей стержней.
16 |
А. В. Яровая Курс лекций по строительной механике. Часть 2 |
7.1.4 Особенности расчета статически неопределимых систем.
Задача расчета любого сооружения состоит в следующем: заданы расчетная схема, нагрузки и воздействия; требуется найти внутренние усилия, а затем такие размеры поперечных сечений элементов, чтобы были обеспечены условия прочности и жесткости, а также некоторые другие требования (например, экономичность конструкции). В общей постановке эта задача для статически неопределимой системы решения не имеет. Все дело в том, что на промежуточном этапе расчета определяются перемещения, значе- ния которых зависят от жесткостей элементов (EA, EJ и т. д.), определяемых по размерам сечений.
Поэтому в расчетной практике ставится более узкая задача: заданы расчетная схема, нагрузки (воздействия) и предварительные размеры сечений элементов; требуется найти внутренние усилия и перемещения, сравнить с допускаемыми величинами (выполнить поверочный расчет). Если условия прочности или жесткости не выполняются, или наоборот, запас прочности слишком велик, расчет повторяют, уточнив размеры сечений элементов.
Âучебных задачах расчета статически неопределимых систем жесткости элементов обычно заданы в исходных данных. В курсе строительной механики студенты изучают методы определения внутренних усилий (построения эпюр) в этих системах от различ- ных внешних воздействий. Дальнейшие расчеты (вычисление напряжений, сравнение их с расчетными сопротивлениями, уточнение размеров сечений и жесткостей, а также при необходимости повторение расчета) они могут выполнить сами на базе знаний, полученных в курсе сопротивления материалов.
Âстатически неопределимых системах внутренние усилия (M, Q, N) и перемещения зависит не только от внешней нагрузки, но и от геометрических характеристик поперечных сечений (площадей A и моментов инерции J). Поэтому задача расчета статически неопределимой системы обычно решается следую-
щим образом:
назначают материал, очертание оси, форму и размеры поперечных сечений – интуитивно, а также пользуясь результатами расчета аналогичных сооружений;
находят внутренние усилия и перемещения;
проверяют прочность и жесткость системы;
если условия прочности или жесткости не выполняются, или наоборот, запас прочности слишком велик, расчет повторяют, уточнив размеры сечений.
А. В. Яровая Курс лекций по строительной механике. Часть 2 |
17 |
7.2Основная система и основные неизвестные метода сил
7.2.1Идея метода сил. Исторически расчету статически неопределимых систем предшествовало достаточно глубокое изучение методов расчета статически определимых систем. Поэтому, естественно, возникла идея о свеäéнии заданной статически неопределимой конструкции к статически определимой.
Суть метода сил: заданная статически неопределимая система освобождается от лишних связей, превращаясь в статически определимую; действие лишних связей заменяется реакциями – силами и моментами. Величины этих реакций подбираются так, чтобы перемещения точек основной системы были такими же, как и перемещения в заданной системе. Далее статически определимая система с помощью уравнений равновесия рассчитывается на совместное действие заданной нагрузки и дополнительных сил – известных реакций лишних связей.
Все последующее изложение метода сил будет производиться в канонической форме, т. е. все этапы расчета будут выполняться
по строго определенным правилам – «канонам».
7.2.2 Основная система. Основная система метода сил образуется из заданной статически неопределимой конструкции отбрасыванием лишних связей и заменой их неизвестными усилиями (реакциями лишних связей).
В большинстве случаев основная система метода сил статиче- ски определима: она получается устранением âñåõ лишних связей, количество которых равно степени статической неопределимости nc. В рамках данного пособия будут рассматриваться только такие основные системы.
При образовании основной системы могут использоваться следующие приемы:
устранение опорных связей;
введение шарниров в жесткие узлы и сечения конструкции;
рассечение элементов.
Для каждой статически неопределимой заданной системы можно подобрать различные основные системы; теоретически существует бесконечное множество вариантов. Однако их должно объединять следующее условие − основная система должна быть
геометрически и мгновенно неизменяемой. Т. е. при формировании основной системы необходимо следить, чтобы отброшены были именно лишние, а не абсолютно необходимые связи.
Так как все дальнейшие вычисления в методе сил связаны с основной системой, удачный ее выбор может существенно снизить трудоемкость расчета.
18 |
А. В. Яровая Курс лекций по строительной механике. Часть 2 |

7.2.3 Основные неизвестные метода сил. Силы и моменты, заменяющие действие отброшенных связей (реакции лишних связей), называются основными неизвестными метода сил. Для основной системы, полученной удалением n лишних связей, неизвестные обозначаются X1, X2, . . . , Xn . Их направления выбираются произвольно. Если реакции получатся положительными, то принятые направления истинны. Если в процессе расчета выяснится, что реакции отрицательны, то их направления противоположны первоначально выбранным.
Для простейшей статически определимой балки с одной лишней связью (рисунок 7.6, à) основную систему можно образовать одним из способов, показанных на рисунке 7.6, á. Первый вариант получен отбрасыванием опорного стержня и заменой его вертикальной силой X1. Во втором варианте жесткая заделка заменена шарниром; X1 представляет собой реактивный момент в заделке. Третий вариант образован введением простого шарнира в одно из сечений балки; в качестве неизвестного X1 выступает внутренний изгибающий момент (при составлении уравнений равновесия всей системы его суммарный момент будет равен нулю).
Рисунок 7.6
Рама на рисунке 7.7, шесть раз статически неопределима. Различ- ные варианты основной системы для нее получены отбрасыванием шести лишних связей с использованием всех трех указанных выше приемов: удаления опорных связей, введения шарниров вместо жестких соединений, рассечения элементов.
Рисунок 7.7
А. В. Яровая Курс лекций по строительной механике. Часть 2 |
19 |

7.3 Канонические уравнения метода сил
Чтобы найти значения n основных неизвестных X1, X2, . . . , Xn , необходимо составить и решить n уравнений, учитывающих особенности деформирования конструкции с учетом ее физической модели. Будем рассматривать линейно-деформируемые стержневые системы, для которых справедлив закон Гука и применим принцип суперпозиции.
Независимо от вида рассчитываемой стержневой системы, указанные уравнения удобно записывать по строго определенному правилу – «канону», поэтому они называются каноническими.
Процесс составления канонических уравнений рассмотрим на конкретном примере. Для дважды статически неопределимой рамы (рисунок 7.8, à) образуем основную систему, отбросив две связи и заменив их реакциями X1 è X2 (рисунок 7.8, á).
Рисунок 7.8
Казалось бы, в основной системе перемещения 1 è 2 по направлениям усилий X1 è X2 возможны (рисунок 7.8, â). Однако заданная рама их не допускает (см. рисунок 7.8, à). Следовательно, для эквивалентности заданной и основной систем необходимо, чтобы перемещения по направлениям отброшенных связей отсутствовали:
|
|
1 = 0 , |
2 = 0 . |
(7.4) |
|
В соответствии с принципом суперпозиции представим пере- |
|||||
мещения (7.4) в следующем виде: |
|
|
|||
1 |
= |
11 |
+Δ12 |
+Δ1p = 0 ; |
|
2 |
= |
21 |
+Δ22 |
+Δ2p = 0 , |
(7.5) |
ãäå ki (k, i = 1, 2) – перемещение в основной системе по направлению усилия Xk, вызванное действием усилия Xi; kp – перемещение в основной системе по направлению усилия Xk, вызванное действием внешней нагрузки.
Как известно, для линейно деформируемой системы любое перемещение, вызванное действием какой-либо силы, можно выразить в виде произведения этой силы на перемещение того же вида
20 |
А. В. Яровая Курс лекций по строительной механике. Часть 2 |