

30 Дифференциальная икм. Структурная схема системы передачи с предсказанием. Структурная схема линейного предсказателя, принцип работы. Адаптивная дифференциальная икм.
ДИКМ
– с-ма с предсказанием. Осн. Идея
предсказания – устранение избыточности,
создающейся в отсчетах сообщения. Так
в отсчетах
![]() содержится определенная информация об
отсчете
содержится определенная информация об
отсчете![]() .
Это зн., что по предыдущим можно предсказать
данный отсчет
.
Это зн., что по предыдущим можно предсказать
данный отсчет![]() с опред. ошибкой
с опред. ошибкой![]() .
Но раз зн-е
.
Но раз зн-е![]() предсказывае6тся,
значит оно известно неслучайно и,
след-но, не несет информации и явл.
избыточным. Его можно исключить, вычитая
из реального отсчета
предсказывае6тся,
значит оно известно неслучайно и,
след-но, не несет информации и явл.
избыточным. Его можно исключить, вычитая
из реального отсчета![]() ,
в рез. чего останется только сигнал
ошщибки предсказания:
,
в рез. чего останется только сигнал
ошщибки предсказания:![]() .
.
В ней содержатся новые сведения, поэтому ее передают в ЛС. В ЦСП сигнал ошибки подвергается обычным операция м квантования и кодирования, в рез. чего получ. сигнал ДИКМ.
Т.
к. выполн. усл-е
![]() ,
то при том же числе уровней квантования,
что и при ИКМ, уменьшается шум квантования.
Если же он остается преждним, то можно
уменьшить разряд кода и, след-но, скорость
передачи инфы, что эквивалентно сжатию.
,
то при том же числе уровней квантования,
что и при ИКМ, уменьшается шум квантования.
Если же он остается преждним, то можно
уменьшить разряд кода и, след-но, скорость
передачи инфы, что эквивалентно сжатию.
На
приемной стороне ДИКМ имеется такой же
предсказатель, как и на передающей. Т.
к. он оперирует с теми же отсчетами,
предсказание имеющее значение нового
отсчета
![]() будет таким же, как и на передающей
стороне. Добавив к нему принятое зн-е
ошибки предсказания, можно восстановить
переданный отсчет.
будет таким же, как и на передающей
стороне. Добавив к нему принятое зн-е
ошибки предсказания, можно восстановить
переданный отсчет.
![]() где значок «
где значок «![]() »
означ, что данный сигнал искажен помехами
в ЛС.
»
означ, что данный сигнал искажен помехами
в ЛС.
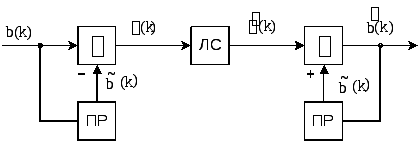
На рисунке в общем виде представлена структурная схема СП с предсказанием. Она содержит: предсказатель ПР, линию связи ЛС, сумматор.
Уточним, что
представляет собой предсказатель. Когда
предсказанное значение отсчета
![]() представляет собой взвешенную сумму
предыдущих отсчетов:
представляет собой взвешенную сумму
предыдущих отсчетов:
![]() ,
где
,
где
![]() ,
имеет место пик предсказания. Коэффициентыa,
b,
c
подбираются из условия миним. сред.
квадр. значения ошибки, т. е. из условия:
,
имеет место пик предсказания. Коэффициентыa,
b,
c
подбираются из условия миним. сред.
квадр. значения ошибки, т. е. из условия:
![]() .
.
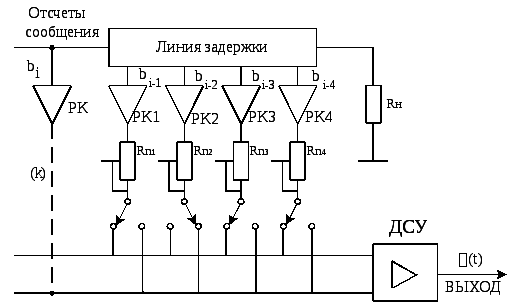
Структурная схема линейного предсказателя состоит из линии задержки ЛЗ, с отводами, разделителей каскадов РК, потенциометров Rn, диф. суммир. усилителя ДСУ. Отводы ЛЗ стоят на расстоянии, соответствующем промежутку времени между отсчетами. С помощью этой линии запоминаются предыдущие отсчеты. Каждый отвод ЛЗ подключен к одному входу ДСУ через РК и Rn, устанавливающий абсолютное значение соотв-го коэф-та a, b или с. Знак его = или – задается потенциометром к одному или другому входу ДСУ. В последнем случае вычитается предсказанное значение из действительного, так что на его выходе получается сигнал ошибки предсказания:
![]() .
.
В системах ДИКМ применяется неравномерное квантование сигнала ошибки, т. к. наиб. вероятны малые ошибки.
Известно большое число вариантоа технического осуществления ДИКМ с линейным предсказателем.
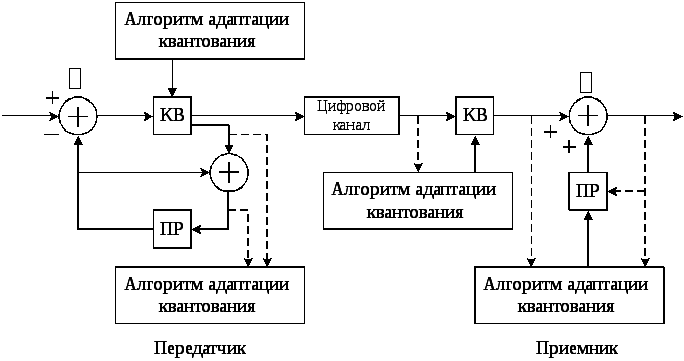
В схеме: КВ – квантователь, ПР- предсказатель.
Ошибка квантования равна:
![]() .
.
В качестве критерия
оценки качества работы системы выбирается
отношение «сигнал-шум»: .
.
Второй множитель
представляет собой отношение «сигнал-шум»
при ИКМ, а первый характеризует при
одинаковых параметрах квантователей
преимущество с-мы ДИКМ. Оно должно быть
максимально возможным. В случае
преобразования речевого сигнала,
являющегося нестационарным процессом,
его ф-я автокорреляции зависит от
времени. След-но, для получения оптимальных
характеристик коэф-ты предсказания
![]() должны изменяться, что требует адаптивного
построения системы. Кроме адаптации
должны изменяться, что требует адаптивного
построения системы. Кроме адаптации![]() в современных системах ДИКМ используется
адаптация и в квантователях. С-ма ДИКМ
с адаптацией предсказателя и квантователя
называется адаптивной ДИКМ (АДИКМ).
в современных системах ДИКМ используется
адаптация и в квантователях. С-ма ДИКМ
с адаптацией предсказателя и квантователя
называется адаптивной ДИКМ (АДИКМ).