

- •Подставив значения (2) и (3) в формулу (1), получим:
- •МОДУЛЬ 3
- •№, тема занятия
- •Тип занятия
- •Вид занятия
- •Занятие 1
- •Знакомство с новым
- •материалом
- •Лекция
- •3 НАУЧНО-ТЕОРЕТИЧЕСКИЙ МАТЕРИАЛ
- •3.1 СЛОВАРЬ ПОНЯТИЙ
- •Примеры решения задач
- •Задача 1 (уровень 2)
- •Примеры решения задач
- •Система состоит из двух тел: груза массой m, который движется поступательно, и барабана, который вращается вокруг неподвижной оси, проходящей через его центр масс (Рис 3.19).
- •Примеры решения задач
- •3.3 ДОПОЛНИТЕЛЬНЫЙ МАТЕРИАЛ
- •4. Механический резонанс. (Исследовать зависимость амплитуды и начальной фазы вынужденных колебаний от частоты вынуждающей силы. Дать определение механического резонанса, построить резонансные кривые.)
МОДУЛЬ 3
ДИНАМИКА ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
Комплексная цель. Студент должен:
а) знать (описывать и формулировать)
понятия и определения момента силы относительно точки, момента силы относительно оси, момента импульса материальной точки относительно точки, момента импульса материальной точки относительно оси, момента импульса вращающегося тела, момента инерции материальной точки относительно оси, момента инерции тела относительно оси, моменты инерции кольца, цилиндра, стержня, шара относительно оси симметрии этих тел, кинетической энергии вращающегося и катящегося тела, работы момента силы; законы изменения момента импульса материальной точки и системы материальных точек, сохранения момента импульса, динамики вращательного движения, теорему Штейнера;
б) доказывать (получать) и характеризовать законы изменения и сохране-
ния момента импульса, выражение для момента импульса вращающегося тела, закон динамики вращательного движения, выражения для кинетической энергии вращающегося тела и работы момента силы;
в) прогнозировать и аналитически описывать динамику систем, состоя-
щих из поступательно движущихся тел и тел, вращающихся вокруг неподвижных осей;
г) уметь
-применять полученные теоретические сведения и математические знания при решении задач динамики вращательного движения,
-проводить лабораторный эксперимент по измерению и последующему вычислению динамических и кинематических характеристик вращения твердого тела вокруг неподвижной оси.
Преподаватель должен формировать социально-личностные каче-
ства студента: толерантность, умение работать в малой группе.
143
1 ВВЕДЕНИЕ. БАЗОВЫЕ ПРОБЛЕМЫ МОДУЛЯ
Динамика вращательного движения. Момент силы относительно не-
подвижной точки. Момент силы относительно неподвижной оси. Момент импульса материальной точки относительно неподвижной точки и неподвижной оси. Закон изменения момента импульса системы материальных точек. Закон сохранения момента импульса. Момент инерции твердого тела относительно оси, проходящей через центр масс. Теорема Штейнера. Момент импульса тела, вращающегося вокруг неподвижной оси. Закон динамики вращения твердого тела вокруг неподвижной оси. Кинетическая энергия вращающегося твердого тела. Полная кинетическая энергия катящегося твердого тела. Работа момента силы при вращении твердого тела вокруг неподвижной оси. Сопоставление основных величин и уравнений, характеризующих вращательное движение тела вокруг неподвижной оси и поступательное движение тела.
Движение в неинерциальных системах отсчета. Силы инерции при поступательном движении неинерциальной системы отсчета. Центробежная сила инерции и сила Кориолиса во вращающейся системе отсчета.
2 УЧЕБНО-ИНФОРМАЦИОННАЯ МОДЕЛЬ МОДУЛЯ
№, тема занятия |
Тип занятия |
|
|
Занятие 1 |
Знакомство с новым |
Динамика |
материалом |
вращательного |
|
движения твердого |
|
тела. |
|
Занятие 2 |
Знакомство с новым |
Динамика |
материалом. |
вращательного |
Углубление |
движения твердого |
|
тела. |
|
Движение |
|
в неинерциальных |
|
системах отсчета. |
|
Занятие 3 |
Углубление |
Динамика |
|
вращательного |
|
движения твердого |
|
тела. |
|
Занятие 4 |
Обобщение. |
Определение момента |
Систематизация. |
инерции твердого тела |
Предварительный |
|
контроль |
Вид занятия |
Кол-во часов |
|
на 1 занятие |
||
|
||
Лекция |
2 |
Лекция 2
Практическое |
2 |
занятие |
|
Лабораторное |
1 |
занятие |
|
144
Занятие 5 |
Углубление. |
Управляемая |
2 |
Кинетическая энергия |
Обобщение. |
самостоятельная |
|
вращательного движения. |
Систематизация |
работа |
|
Сопоставление |
|
|
|
характеристик поступа- |
|
|
|
тельного и вращательного |
|
|
|
движений. |
|
|
|
Занятие 6 |
Суммарный контроль |
|
1 |
Динамика вращательного |
|
|
|
движения твердого тела. |
|
|
|
Движение в неинерциаль- |
|
|
|
ных системах отсчета |
|
|
|
|
|
|
|
3 НАУЧНО-ТЕОРЕТИЧЕСКИЙ МАТЕРИАЛ
3.1 СЛОВАРЬ ПОНЯТИЙ
3.1.1 Новые понятия
1. Момент силы относительно точки есть векторное произведение радиуса-вектора, проведенногоr из этой точки в точку приложения силы, и
вектора силы: M o = rr× F . Момент силы относительно оси — это состав-
ляющая (векторнаяr проекцияr ) на эту ось момента силы относительно любой точки этой оси: M ZZ ′ = (Mo )ZZ ′.
2. Момент импульса материальной точки относительно точки есть векторное произведение радиуса-вектора, проведенного из этойr точки в ма-
териальную точку, и вектора импульса материальной точки: LO = rr× pr. Мо-
мент импульса материальной точки относительно оси — это составляю-
щая (векторная проекция) на эту ось момента импульса материальной точки относительно любой точки оси: LZZ ′ =(LO )ZZ ′.
3. Момент импульса системы материальных точек представляет со-
бой векторную сумму моментов импульса всех точек системы (относительно некоторой точки или некоторой оси). Момент импульса твердого тела,
вращающегося вокруг неподвижной оси ZZ ′, равен произведению момен-
та инерции твердого тела относительно этой оси и вектора угловой скорости вращения тела: LZZ ′ = IZZ ′ωr .
145

4.Закон сохранения момента импульса: момент импульса замкнутой системы материальных точек относительно произвольной точки или произвольной оси остается постоянным.
5.Момент инерции материальной точки относительно некоторой оси ZZ ′ есть произведение массы материальной точки и квадрата расстояния
от нее до оси: IZZ ′ = mr2 . Момент инерции тела относительно оси — есть сумма моментов инерции всех материальных точек тела (элементарных масс,
составляющих тело): I |
|
N |
|
N |
m r2 . |
ZZ |
′ = ∑ I |
′ = ∑ |
|||
|
i=1 |
ZZi |
i=1 |
i i |
|
|
|
|
|
||
6. Закон динамики вращательного движения: угловое ускорение, с
которым вращается тело относительно неподвижной оси, прямо пропорционально векторной сумме моментов всех внешних сил, действующих на тело, и обратно пропорционально моменту инерции тела относительно этой оси:
βr |
|
∑(M âíåø )zz′ |
|
|
= |
i |
. |
||
IZZ ′ |
||||
|
|
|
7. Кинетическая энергия тела, вращающегося вокруг неподвижной оси (вращательного движения), равна половине произведения момента инерции тела относительно оси вращения и квадрата угловой скорости вращения:
Wk = IZZ2′ω2 .
8. Работа момента силы, действующего на вращающееся тело, при его повороте на элементарный угол dϕ равна произведению момента си-
лы относительно оси вращения и величины угла поворота: δA = M ZZ ′dϕ.
9. Неинерциальными системами отсчета называются системы отсче-
та, движущиеся с ускорением относительно инерциальных систем отсчета. Силы инерции — это дополнительные силы, возникающие в неинер-
циальной системе отсчета вследствие ее ускоренного движения.
3.1.2Понятия для повторения
1.Инерциальные системы отсчета.
2.Угловая скорость. Угловое ускорение.
3.Законы Ньютона.
4.Импульс материальной точки.
5.Внутренние и внешние силы системы, замкнутая система.
6.Закон сохранения импульса.
7.Кинетическая энергия поступательного движения.
8.Работа силы.
146

3.2ОСНОВНОЙ ТЕОРЕТИЧЕСКИЙ МАТЕРИАЛ
3.2.1Динамика вращательного движения
3.2.1.1 Момент силы. Момент пары сил
Для изучения основного закона вращательного движения необходимо познакомиться с некоторыми новыми физическими величинами.
Момент силы f относительно неподвижной точки О — это вектор-
ное произведение радиуса-вектора, проведенного из точки О в точку приложения силы, и вектора силы (рис. 3.1, а):
Mî = rr× f . |
(3.1) |
(Заметим, что векторное произведение двух векторов является не вектором, а псевдовектором. Псевдовектор отличается от вектора тем, что при переходе от правой системы координат к левой он не изменяет знак соответствующей компоненты. В дальнейшем не будем учитывать разницу между вектором и псевдовектором).
а) |
б) |
|
Рис. 3.1 |
Определим направление вектора Mo . Определение (3.1) указывает на то, что момент силы относительно точки О направлен перпендикулярно к плоскости, в которой лежат векторы F и r (т.е. плоскости, в которой лежит
вектор f и точка О) по правилу (правого) винта, если его поворачивать от
радиуса-вектора r к вектору f по минимальному углу. На рис. 3.1, а вектор |
|||
r |
|
направлен перпендикулярно плоскости Р вниз от нее. |
|
M |
o |
|
|
|
r |
|
|
|
|
Модуль вектора Mo как векторного произведения |
|
|
|
rМо = rFsinα, |
(3.2) |
где α — угол между векторами r è F . Если провести из точки О перпендикуляр на линию силы (рис. 3.2, а), то длина этого перпендикуляра h = rsinα.
Поэтому вместо (3.2) для абсолютной величины момента силы F относительно неподвижной точки О получим:
147

(3.3)
где h — расстояние между точкой О и линией действия силы, называется плечом момента силы.
Очевидно, что если точка О, относительно которой определяется момент силы, находится на линии силы (рис. 3.1, б), то момент силы относи-
тельно этой точки равен нулю (в этом случае α = 0, h = 0).
Проведем черезr точку О в произвольном направлении ось ZZ′ (рис. 3.1, а).
Моментом силы F относительно оси ZZ′ называется составляющая (или
векторная проекция) вдоль этой оси момента силы |
F относительно произ- |
вольной точки О, лежащей на этой оси: |
|
r |
|
M ZZ ′ =(Mo )ZZ ′ |
(3.4) |
Можно показать, что определенный таким образом момент силы относительно оси не зависит от выбора точки О на этой оси. Согласно определению (3.4), момент силы относительно определенной оси направлен вдоль
этой оси. Для нахождения величины вектораM ZZ ′рассмотрим его определение более подробно.
Выберем направление оси ZZ′ и силы F , как показано на рис. 3.2. Чтобы определить момент силы F относительно оси ZZ′, выберем на ней произ-
вольную точку О и проведем из нее вектор r в точку приложения силы А. На основании (3.4) и (3.1)
|
|
|
M ZZ =(rr× F)ZZ ′ . |
(3.5) |
|||
|
|
|
Проведем через точку А плоскость Q, |
||||
|
|
|
перпендикулярную оси ZZ′. Эта плоскость пе- |
||||
|
|
|
ресечет ось ZZ′ в определенной точке C. |
||||
|
|
|
Представим |
вектор r в виде |
суммы |
||
|
|
|
|
|
|
→ |
|
|
|
|
двух векторов: r|| |
=OC , направленного вдоль |
|||
|
|
|
оси ZZ′, и rr |
|
→ |
, лежащего в плоскости Q и, |
|
|
|
|
|
=CA |
|||
|
|
|
|
|
|
|
|
|
|
|
значит, перпендикулярного этой оси: |
|
|||
Рис. 3.2 |
|
|
r = r|| + r . |
|
(3.6) |
||
|
|
|
|
||||
Таким же образом запишем вектор F как сумму двух его составляю- |
|||||||
щих: Fr||, направленной параллельно оси ZZ′, и F , находящейся в плоскости |
|||||||
Q, т.е перпендикулярной этой оси: |
|
|
|
|
|||
|
|
|
F = F|| |
+ F . |
|
(3.7) |
|
Подставив (3.6) и (3.7)rв (3.5), будем иметь следующее выражение: |
|||||||
|
|
M ZZ ′ = ((rr|| + rr ) ×(F|| + F ))ZZ ′. |
(3.8) |
||||
Правую часть равенства (3.8) вычислим с помощью распределительно- |
|||||||
го закона умножения, справедливого и для векторного произведения: |
|
||||||
r |
r |
r |
r |
|
r |
r |
(3.9) |
M ZZ ′ |
= (r|| ×F||) +(r|| ×F ) +(r ×F||) +(r ×F ) . |
||||||
В (3.9) момент силы относительно оси предстает в виде векторной суммы четырех слагаемых, каждое из которых представляет собой проекцию
148

на ось ZZ′ определенного векторного произведения. Рассмотрим каждое слагаемое отдельно.
Первое векторное произведение в (3.9), очевидно, равно нулю, т.к. это произведение параллельных векторов. Второе векторное произведение в этой
же формуле, т.е. rr|| ×F , представляет собой вектор, перпендикулярный век-
тору r|| и лежащий в плоскости Q. Но в таком случае его проекция на ось ZZ′,
т.е. (rr|| ×Fr )ZZ ′, равна нулю. Следующее третье векторное произведение в
(3.9), т.е. rr ×F|| , представляет собой вектор, направленный перпендикуляр-
но проекции силы Fr|| , а значит, лежащий в плоскости Q. Проекция этого векторного произведения (rr × F||)ZZ ′ = 0. Наконец, векторное произведение в
последнем слагаемом первой части равенства (3.9) направлено параллельно оси ZZ′, так как оба вектора лежат в плоскости Q. Исходя из этого символ проекции в выражении (rr ×F )ZZ ′ можно опустить, и вместо (3.9) получим:
M ZZ ′ = rr ×F . |
(3.10) |
Равенство (3.10) означает, что момент силы F относительно оси ZZ′ равен векторному произведению радиуса-вектора, проведенного от оси перпендикулярно ей в точку приложения силы, и проекции вектора силы на плоскость, перпендикулярную этой оси.
Если вектор силы лежит в плоскости, перпендикулярной оси, то момент силы относительно оси совпадает с моментом силы относительно точки пересечения этой оси и указанной плоскости. Этот простейший случай изображен на рис. 3.3. В этом случае:
M ZZ ′ = Mî = rr×F.
Рис 3.3
Продолжим рассмотрение общего случая, изображенного на рис. 3.2. Проведем в плоскости Q окружность с центром в точке С радиусом r . (На рис. 3.2 показана часть этой окружности в окрестности точки А). Проведем также касательную в точке А к окружности и разложим вектор F на две
составляющие: Frτ вдоль касательного направления и FrR — вдоль радиуса окружности r :
149
F = Fτ + FR. |
(3.11) |
Если подставить (3.11) вr(3.10), получим: |
|
M ZZ ′ = rr ×Fτ +rr ×FR. |
(3.12) |
Последнее векторное произведение в (3.12) равно нулю, т.к. векторы r |
|
и FrR направлены вдоль одного (радиального) направления. С учетом этого |
|
вместо (3.12) для момента сил относительно оси получим следующее выра- |
||
жение: |
r |
|
|
|
|
|
M ZZ ′ = rr × Fτ. |
(3.13) |
Учитывая то, что rr и Frτ перпендикулярны друг другу, для модуля |
||
|
r |
|
момента силы M ZZ ′ из (3.13) имеем: |
|
|
|
M ZZ ′ = r Fτ. |
(3.14) |
Последняя формула показывает, что величина момента силы Fr |
отно- |
|
сительно оси ZZ′ равна произведению длины радиуса-вектора, проведенного от оси перпендикулярно ей в точку приложения силы, и модуля проекции силы на касательное к окружности вращения вокруг оси направление.
Приходим, таким образомr , к выводу: при произвольном направлении
вектора силы момент силы F относительно определенной оси образуется только касательной к окружности вращения вокруг этой оси составляющей вектора силы. Поэтому если линия силы пересекает ось ZZ′, как на рис. 3.4, то M ZZ ′ = 0 , т.к. в этом случае Fτ = 0 , F = FR.
Рис. 3.4 Рис. 3.5
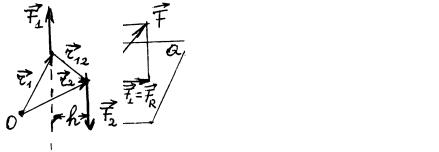
Две равные по величине и противоположно направленные силы, не действующие вдоль одной прямой, называются парой сил (рис. 3.5). Расстояние h между прямыми, вдоль которых действуют силы, называется пле-
чом пары сил. Суммарный момент пары сил F1 и F2 относительно произ-
вольной точки О |
r |
r |
|
r |
×F2. |
|
|
||||
r |
rMî |
= r1 |
×F1 |
+ r2 |
|
Учитывая то, что F1 |
= − F2 , можно написать: |
||||
150
r |
r |
r |
r |
r |
r |
r |
r |
r |
r |
, |
(3.15) |
Mî |
= −(r1 |
×F2 ) + r2 |
×F2 |
= (r2 |
−r1) ×F2 |
= r12 |
×F2 |
||||
где rr12 = rr2 − rr1 — вектор, проведенный из точки приложения силы F1 в точку приложения силы Fr2 . Выражение (3.15) не зависит от точки О. Следователь-
но, момент пары сил относительно любой точки будет один и тот же. Вектор момента пары сил перпендикулярен плоскости, в которой лежат силы. Модуль вектора момента пары сил (относительно точки), как следует из (3.15):
Mî = r12F2 sin α = F2 h,
т.е. произведению модуля любой из сил и плеча.
3.2.1.2 Момент импульса материальной точки
Другой величиной, характеризующей динамику вращения твердого тела вокруг неподвижной оси, является момент импульса.
Пусть материальная точка массой m движется со скоростью υ и, сле-
довательно, имеет импульс p = mυ. Моментом импульса материальной точкиr относительно определенной неподвижной точки О называется век-
тор Lî , равный векторному произведению радиуса-вектора r , проведенного из точки О в материальную точку, и вектора импульса p этой материальной точки (рис. 3.6):
r |
r |
r |
r |
(3.16) |
Lî = r |
× p = mr |
×υ |
||
В соответствии с определением (3.16) вектор Lî |
момента импульса от- |
|||
носительно точки О направлен перпендикулярно плоскости, в которой находится точка О и вектор p (а значит и υ ), по правилу буравчика и имеет ве-
личину:
Lî = rpsin α = ph,
где h — плечо момента импульса, т.е. расстояние между точкой О и линией вектора импульса p , (или скорости υ).
Момент импульса материальной точки относительно оси ZZ′ — это векторная проекция (или составляющая) на эту ось момента импульса материальной точки относительно произвольной точки на этой оси:
LZZ ′ =(Lî )ZZ ′ =(rr× pr)ZZ ′. |
(3.17) |
Так же, как для случая момента силы, в результате подробного рас- |
|
смотрения величины LrZZ ′ можно определить, какие проекции вектора p |
|
вносят свой вклад в момент импульса. Аналогично (3.10) получим: |
|
LZZ ′ = rr × pr , |
(3.18) |
где rr — радиус-вектор, проведенный от оси перпендикулярно к ней в материальную точку; pr — проекция вектора импульса материальной точки на
плоскость, перпендикулярно оси ZZ′.
Аналогично (3.14) выполняется также соотношение:
151

LZZ ′ = r × pτ,
где рτ — проекция вектора импульса на касательное к окружности вращения вокруг оси направление.
3.2.1.3 Закон сохранения момента импульса механической системы
Выясним, по какой причине изменяется момент импульса материальной точки. Допустим, материальная точка массой m имеет импульс p и находится под действием сил со стороны других материальных точек. Выберем определенную ось ZZ′ и определим производную момента импульса матери-
альной точки относительно оси ZZ′ по времени: r
dLdtZZ ′ = dtd (rr× pr)ZZ ′ = m dtd (rr×υr)ZZ ′.
Производная векторного произведения вычисляется аналогично производной произведения двух скалярных величин. С учетом этого предыдущее
равенство продолжается следующим образом: |
|
|
r |
|
|
|
|
|
|||||||||
|
r |
|
|
r |
r |
|
|
|
r |
|
|
|
|
|
|
||
|
dL |
= m(dr |
|
|
|
× d |
υ |
|
′. |
|
|
|
|||||
|
ZZ ′ |
×υ) |
ZZ |
′ +m(r |
) |
ZZ |
|
|
(3.19) |
||||||||
|
dt |
|
|
||||||||||||||
|
|
dt |
|
|
|
|
dt |
|
|
|
|
||||||
Первое векторное произведение равно нулю как векторное произведе- |
|||||||||||||||||
ние одинаковых векторов. Учитывая то, что производная |
dυ |
есть вектор ус- |
|||||||||||||||
dt |
|
||||||||||||||||
корения материальной точки ar, из (3.19) получим: |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
||||||||||||
|
|
|
dLZZ ′ |
= (rr×mar) |
ZZ |
′. |
|
|
|
|
|
|
(3.20) |
||||
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
ma равно век- |
|||
На основании второго закона Ньютона произведение |
|||||||||||||||||
торной сумме всех приложенных к материальной точке сил, которую обозначим F . С учетом этого вместо (3.20) можно написать:
|
dLr |
r |
r |
|
′. |
|
|
ZZ ′ |
= (r |
×F ) |
ZZ |
(3.21) |
|
|
dt |
|||||
В соответствии с определением (3.5) правая часть (3.21) представляет |
||||||
собой момент результирующей силы, приложенной к материальной точке, |
|||||
относительно оси ZZ′. C учетом этого предыдущее равенство приобретает |
|||||
окончательный вид: |
r |
|
|
|
|
|
r |
|
|
|
|
|
dLZZ ′ |
|
|
|
|
|
= M |
ZZ |
′. |
(3.22) |
|
|
dt |
||||
|
|
|
|
||
Равенство (3.22) утверждает, что производная момента импульса материальной точки относительно определенной оси равна моменту результирующей силы, приложенной к этой материальной точке, относительно той же оси.
152

Рассмотрим систему материальных точек с массами m1, m2 ,..., mN ,
между которыми действуют внутренние силы fik . Для внешних сил, действующихr на материальные точки системы, по-прежнему используем обозначение Fi — это результирующая всех внешних сил, действующих на матери-
альную точку с номером i . Соответственно, моменты сил, приложенных к i - ой материальной точке системы, делятся на моменты внутреннихr сил, кото-
рые обозначим (Mrikвнутр )ZZ ′, и моменты внешних сил. (Miâíåø
этого уравнение (3.22) для i-ой материальной точки системы будет записано |
||||||||
в виде: |
|
r |
|
|
|
|
|
|
|
|
|
N |
r |
r |
|
|
|
|
|
d (Li )ZZ ′ |
|
|
||||
|
|
= ∑(Mikвнутр )ZZ ′ +(Miâíåøi )ZZ ′. |
(3.23) |
|||||
|
|
dt |
||||||
|
|
k =1 |
|
|
|
|
||
Если сложить равенства типа (3.23) для всех материальных точек сис- |
||||||||
темы, т. е. для i = 1, 2, …, N, получим следующее выражение: |
|
|||||||
N |
d (Lr |
) |
N N |
r |
N |
r |
(3.24) |
|
∑ |
|
i |
ZZ ′ = ∑ ∑(Mikвнутр )zz′ + ∑ |
(Miâíåø )ZZ ′. |
||||
i=1 |
|
dt |
i=1k =1 |
i=1 |
|
|
||
Двойная сумма в правой части (3.24) представляет собой векторную сумму моментов всех внутренних сил системы относительно оси ZZ′. Нетрудно показать, что векторная сумма моментов внутренних сил, действующих между каждыми двумя точками системы, например между точками с номерами i и k, относительно любой выбранной оси равна нулю. Действи-
тельно, пусть ось ZZ′ перпендикулярна плоскости рисунка (рис. 3.7), материальные точки с массами m1 и m2 находятся в плоскости рисунка и взаимодей-
ствуют между собой с силами fik = − fki.
Рис. 3.6 |
Рис. 3.7 |
Моменты этих сил относительно оси ZZ′ совпадают в этом случае с их моментами относительно точки О (точки пересечения оси ZZ′ с плоскостью рисунка). С учетом определения (4.1) моменты отмеченных сил записываются в следующем виде:
(Mik )ZZ ′ = (Mik )0 = rri × fik , |
|
( M ki ) ZZ ′ = ( M ki )0 = rrk × f ki . |
(3.25) |
153
Направления векторных произведений, записанных в правой части равенств (3.25), противоположны друг другу. Модули этих выражений одинаковы, что становится очевидным, если модуль каждого из них записать через плечо момента силы h на основании (3.3):
(Mik )ZZ ′ = hfik , |
|
(Mki )ZZ ′ = hfki , |
(3.26) |
и учесть равенство fik = fki . Таким образом, |
приходим к выводу, что для |
двух материальных точек системы моменты сил их взаимодействия относи- |
|
тельно выбранной оси равны по модулю и направлены противоположно: |
|
r |
|
(Mik )ZZ ′ = −(Mki )ZZ ′. |
(3.27) |
На этом основании можно утверждать, что векторная сумма всех моментов внутренних сил системы материальных точек относительно произвольной оси равна нулю:
N |
N |
r |
|
|
|
|
∑ ∑(Mikвнутр )ZZ ′ = 0. |
(3.28) |
|||||
i=1k =1 |
|
|
|
|
||
С учетом (3.28) уравнение (3.24) приобретает вид: |
|
|||||
N d |
(Lr ) |
ZZ ′ |
N |
r |
|
|
∑ |
|
i |
= ∑(Miâíåø )ZZ ′. |
(3.29) |
||
|
dt |
|
||||
i=1 |
|
i=1 |
|
|
||
Если в левой части (3.29) поменять местами знаки суммы производной, то появляется векторная сумма моментов импульса всех материальных точек системы:
N |
d(Lr ) |
ZZ |
′ |
|
d |
N |
r |
|
|
|
∑ |
i |
|
= |
|
∑ |
(L ) |
ZZ |
′. |
(3.30) |
|
|
|
|
|
|||||||
i=1 |
dt |
|
|
|
dt i=1 |
i |
|
|
||
|
|
|
|
|
|
|
||||
Назовем векторную сумму моментов импульса всех материальных то-
чек системы моментом импульса системы относительно оси ZZ′:
r N r
LZZ ′ = ∑(Li )ZZ ′. i=1
С помощью этой величиныr (3.29) запишется окончательно в виде:
dLZZ ′ = ∑N (Mr âíåø
dt i=1 i
(3.31)
(3.32)
Правая часть (3.32) представляет собой векторную сумму моментов всех внешних сил, действующих на систему. Она иногда называется глав-
ным, или результирующим моментом внешних сил. С использованием этого термина результат (3.32) должен быть сформулирован следующим образом: производная по времени момента импульса системы материальных точек относительно определенной неподвижной оси равна главному (резуль-
154
тирующему) моменту всех внешних сил, приложенных к системе, относительно этой же оси. Это утверждение называется законом изменения мо-
мента импульса системы материальных точек.
Если система материальных точек замкнута, то все внешние силы Fi , а
значит и их моменты относительно произвольной точки или произвольной оси равны нулю. В этом случае
(Miâíåø )ZZ ′ = 0,
и из (3.32) вытекает: |
|
||
|
dLZZ ′ |
= 0 , |
(3.33) |
|
|
||
|
dt |
|
|
что означает неизменность вектора LZZ ′ с течением времени: |
|
||
LZZ ′ = const. |
(3.34) |
||
Равенство (3.34) представляет собой запись закона сохранения момента импульса, который состоит в том, что момент импульса замкнутой системы материальных точек относительно произвольной оси (или произвольной точки) остается постоянным.
3.2.1.4 Момент импульса тела, вращающегося вокруг неподвижной оси. Момент инерции тела
Рассмотрим в качестве системы материальных точек твердое тело произвольной формы, которое вращается вокруг неподвижной оси. Пусть ось проходит через центр масс этого тела (рис. 3.8). Определим момент импульса тела относительно оси вращения ZZ′. В соответствии с определением момент импульса тела есть векторная сумма моментов импульса всех материальных точек тела относительно выбранной оси. Представим себе, что тело состоит из множества маленьких частиц, которые можно считать его точками. Обо-
значим массу частицы с номером i через mi . |
При вращении тела вокруг |
|
неподвижной оси ZZ′. Материальная точка массой |
m движется по окружно- |
|
|
|
i |
сти радиусом r |
, центр которой O лежит на оси вращения ZZ′. Вектор скоро- |
|
i |
i |
|
сти этой материальной точки υi направлен по касательной к траектории, т.е. окружности. Импульс материальной точки pi = miυi направлен в ту же
сторону. Момент импульса материальной точки относительно оси ZZ′ совпадает в данном случае с его моментом импульса относительно точки Î i (так
как вектор pi лежит в плоскости, перпендикулярной оси),
r |
r |
r |
r r |
(3.35) |
( Li )ZZ ′′ = ri × |
pi = |
miri ×υi . |
||
155

Вектор ( Lri )ZZ ′ направлен вдоль оси ZZ′ и в случае направления враще-
ния, изображенном на рис. 3.8, вверх величина момента импульса с учетом перпендикулярности векторов rri и υi
( L ) |
ZZ ′ |
= |
m r2ω, |
или |
в |
соответствую- |
||
i |
|
i |
i |
|
|
|
|
|
щей векторной форме: |
|
|
||||||
|
|
( |
L ) |
|
= |
m r2 |
r |
(3.36) |
|
|
ZZ ′ |
ω. |
|||||
|
|
|
i |
|
i i |
|
|
|
Рис. 55
Для всех частиц данного твердого тела векторы моментов импульсов направлены одинаково — вдоль оси вращения. В результате вектор момента
импульса тела относительно оси ZZ′, т.е. LZZ ′, тоже направлен по оси ZZ′ (как и вектор ω), и по величине
r |
N |
r |
|
LZZ ′ = ∑( |
Li )ZZ ′. |
(3.37) |
|
|
i=1 |
|
|
Подставив (3.37) в (3.38), получим для момента импульса тела:
r |
N |
m r2 |
r r N |
m r2. |
(3.38) |
L |
′ = ∑ |
ω= ω∑ |
|||
ZZ |
i=1 |
i i |
i=1 |
i i |
|
|
|
|
|
Вформуле (3.38) выступает особая скалярная физическая величина
∑miri2 — сумма произведений элементарных масс каждой частицы тела,
умноженная на квадрат расстояния между этой массой и осью ZZ′. Эта вели-
чина называется моментом инерции тела относительно оси ZZ′. Она обыч-
но обозначается IZZ ′.
N
IZZ ′ = ∑ miri2 . (3.39)
i=1
Момент инерции тела IZZ ′ выполняет роль массы при вращательном
движении, а значит, является мерой инертности тела при его вращении. Каждое слагаемое суммы (3.39), точнее, каждое произведение массы материальной точки тела (элементарной массы) на квадрат его расстояния до оси, на-
зывается моментом инерции материальной точки IZZ′ относительно этой оси:
I |
ZZ |
′ = m r2. |
(3.40) |
|
i i |
|
Две последние формулы показывают, что момент инерции тела равен сумме моментов инерции всех его материальных точек (относительно одной и той же оси):
156
IZZ ′ = ∑ IiZZ ′. |
(3.41) |
i |
|
С использованием определения момента инерции тела (3.39) выражение (3.38) для момента импульса тела, вращающегося вокруг неподвижной оси, запишем в следующем окончательном виде:
r |
(3.42) |
LZZ ′ = IZZ ′ω. |
Равенство (3.42) указывает на то, что момент импульса вращающегося вокруг неподвижной оси тела относительно оси вращения равен произведению момента инерции этого тела относительно оси вращения и вектора угловой скорости.
Обратим внимание на определение момента инерции тела относительно определенной оси ZZ′. При использовании формулы (3.39) тело должно быть разделено на такие малые части, чтобы их можно было считать материальными точками, т.е. объем и масса mi частиц должны стремиться к нулю.
В таком случае число частиц деления будет стремиться к бесконечности. Следовательно, точное вычисление момента инерции тела должно проводиться по формуле:
I |
ZZ |
′ = lim |
∑ |
m r2. |
|
mi →0 |
i |
i i |
|
|
|
|
Правая часть этого равенства представляет собой интеграл по объему тела, поэтому окончательно:
IZZ ′ = ∫r2dm = ∫ρr2dV, |
(3.43) |
|
V |
V |
|
где dm — элементарная масса тела, которую через плотность вещества ρ можно записать в виде dm =ρdV . Если тело неоднородное, его плотность
есть функция координат, ρ = ρ(x, y, z).
Если масса тела распределена только по поверхности тела (случай так называемого тонкостенного тела) с поверхностной плотностью σ момент инерции тела относительно определенной оси ZZ′ находится путем интегрирования по поверхности тела:
IZZ ′ = ∫σ(x, y, z)r2dS. |
(3.44) |
S |
|
Наконец, если масса распределена вдоль линии, то момент инерции такого тела высчитывается через линейную плотность λ с помощью интегрирования вдоль линии:
IZZ ′ = ∫λ(x, y, z)r2dl. |
(3.45) |
L |
|
Рассмотрим простейшие случаи использования формул (3.43)−(3.45). 1. Тело представляет собой бесконечно тонкое однородное кольцо ра-
диусом R массой m (рис. 3.9, а). Для отыскания момента инерции этого тела
157

относительно оси ZZ′, перпендикулярной плоскости кольца и проходящей через его центр, используем формулу (3.45). В данном случае величины λ и r постоянные: λ — по причине однородности кольца, r — так как все материальные точки кольца находится на одинаковом расстоянии r = R от оси. На этом основании из (3.45) получим:
IZZ ′ = ∫λr2dl = λr2 ∫dl = λR2 2πR.
L L
Произведение 2πRλ = m — масса тела. Поэтому окончательно
IZZ ′ = mR2. |
(3.46) |
2. Тело представляет собой однородный тонкостенный цилиндр радиусом R массой m (рис. 3.9, б). Значит, для вычисления момента инерции тела необходимо использовать формулу (3.44). Учитывая то, что в данном случае величины σ и r = R постоянны, получим:
IZZ ′ = ∫σr2dS = σR2S = mR2 ,
S
где S — площадь поверхности цилиндра, произведение σS равно массе тела m. Поэтому приходим к формуле, совпадающей с (3.46).
а) |
б) |
в) |
Рис 3.9
3. Тело представляет собой однородный цилиндр массой m, распределенной по всему объему цилиндра радиуса R (рис. 3.9, в). В этом случае для вычисления момента инерции тела надо пользоваться формулой (3.43), где в качестве элементарного объема dV следует выбрать объем тонкого цилиндрического слоя с переменным радиусом r, толщиной dr. Если обозначить высоту цилиндра через h, отмеченный элементарный объем dV =2 πrhdr. Подставляя это выражение в (3.43), получим:
158
R
IZZ ′ = ∫ρ2πr2hdr.
0
Вынося за знак интеграла постоянный множитель 2πρh, после интегрирования в пределах от r = 0 до r = R, получим:
Izz′ = πρh R2 .
2
Масса цилиндра m = ρV = ρπR2 h; приходим к окончательному выражению момента инерции однородного цилиндра относительно его оси симметрии:
IZZ ′ = mR2 . |
(3.47) |
2 |
|
Невысокий цилиндр иногда называют диском.
Ниже приведены без выводов выражения для моментов инерции некоторых тел правильной геометрической формы.
Момент инерции однородного шара массой радиусом R относительно оси, проходящей через центр шара:
IZZ ′ = |
2 mR2. |
(3.48) |
|
5 |
|
Момент инерции тонкого однородного стержня массой m, длиной l относительно оси, проходящей перпендикулярно стержню через его середину:
IZZ ′ = |
|
1 |
ml2. |
(3.49) |
|
12 |
|||||
|
|
|
|||
Если тело состоит из нескольких частей, то, очевидно, момент инерции тела относительно определенной оси равен сумме моментов инерции всех частей тела относительно той же оси.
Момент инерции тела зависит от выбора оси. Связь между моментами инерции данного тела относительно разных осей устанавливается с помощью теоремы Штейнера, которая формулируется следующим образом: момент инерции тела относительно произвольной оси IZZ ′равен сумме момента
инерции этого тела относительно оси, параллельной ей и проходящей через
159
центр масс тела ICC′, и произведения массы тела и квадрата расстояния ( a ) между упомянутыми осями:
IZZ ′ = ICC′ +ma2 . |
(3.50) |
3.2.1.5 Основной закон динамики вращательного движения твердого тела вокруг неподвижной оси
Пусть твердое тело произвольной формы вращается вокруг определенной неподвижной оси ZZ′. Момент импульса этого тела, которое можно рассматривать как систему материальных точек, подчиняется закону изменения момента импульса системы (3.32). С другой стороны, момент импульса вращающегося вокруг неподвижной оси тела связан с моментом инерции и угловой скоростью тела с помощью соотношения (3.42). Подставив последнее в
(3.32), получим:
d (IZZ ′ω) = ∑(Mr dt i
âíåø |
)ZZ . |
(3.51) |
i |
При условии абсолютной твердости тела его момент инерции при вращении вокруг оси не изменяется. На этом основании в (3.51) величину IZZ′ можно вынести за знак производной, после чего получим:
IZZ ′ dωr = ∑(Mr
dt i
âíåø |
)ZZ ′, |
i |
или, учитывая то, что производная угловой скорости по времени есть угловое ускорение β,
IZZ ′βr = ∑(Miâíåø |
)ZZ ′, |
|
||
откуда |
i |
|
|
|
∑(Miâíåø )ZZ ′ |
|
|||
βr = |
|
|||
i |
|
. |
(3.52) |
|
IZZ ′ |
|
|||
|
|
|
|
|
Выражение (3.52) представляет собой основной закон динамики вращательного движения тела вокруг неподвижной оси. Он звучит сле-
дующим образом: угловое ускорение, с которым вращается тело вокруг неподвижной оси, прямо пропорционально сумме моментов всех внешних сил, действующих на тело (главному моменту внешних сил), относительно оси
160
вращения и обратно пропорционально моменту инерции тела относительно той же оси.
Если моменты внешних сил относительно определенной оси равны нулю, то, как следует из (3.52), угловое ускорение при вращении вокруг этой оси
β = 0, т.е. тело вращается вокруг этой оси равномерно.
Если тело не является абсолютно твердым, то основной закон динамики вращательного движения выполняется в виде (3.51). Если, например, моменты внешних сил равны нулю, то из (3.51) вытекает:
d(dtIω) =0,
откуда получается, что
Iω=const,
что означает обратно пропорциональную зависимость между величи-
нами I и ω. Наглядным примером такого случая является фигурист на льду. Фигурист начинает вращаться вокруг вертикальной оси с угловой скоростью
ω1, расставив руки в стороны. Затем он прижимает руки к туловищу, в результате чего угловая скорость вращения увеличивается до определенного
значения ω2. Последняя находится из равенства Ι1ω1 = Ι2ω2, где I1 — исходный момент инерции,
I2 — конечный момент инерции фигуриста. Тот же эффект можно наблюдать с помощью скамьи Жуковского.
3.2.1.6 Кинетическая энергия вращательного движения
Найдем кинетическую энергию тела, вращающегося вокруг неподвижной оси. Кинетическая энергия тела как аддитивная величина, слагается из кинетических энергий его элементарных частей. Кинетическая энергия одной
элементарной части (материальной точки) массой |
mi , движущейся со ско- |
|||||
ростью υi , |
|
|
|
|
|
|
|
W |
= |
m υ2 |
|
||
|
i i |
. |
(3.53) |
|||
|
|
|||||
|
|
ki |
2 |
|
|
|
|
|
|
|
|
|
|
Складывая величины |
Wki |
всех частей тела, |
получим кинетическую |
|||
энергию тела Wk |
|
|
|
|
|
|
161

N |
m υ2 |
W = ∑ |
i i , |
k |
2 |
i=1 |
в которую подставим вместо скорости каждой точки тела υi ее выражение
через угловую скорость, т.е. υ =ωr :
i i
W = |
ω2 |
N |
m r2. |
(3.54) |
|
∑ |
|||
k |
2 |
i=1 |
i i |
|
|
|
|
(за знак суммы вынесен одинаковый для всех слагаемых множитель). В соответствии с (3.39) выражение (3.54) преобразуется в следующую формулу:
W = |
IZZ ′ω2 |
. |
(3.55) |
|
|||
k |
2 |
|
|
|
|
|
Таким образом, приходим к выводу, что кинетическая энергия тела,
вращающегося вокруг неподвижной оси, равна половине произведения мо-
мента инерции тела относительно оси вращения и квадрата угловой скорости. Если тело одновременно с враще-
нием движется поступательно, то его кинетическая энергия складывается из кинетической энергии поступательного и вращательного движений. Пусть, например, тело катится без скольжения по горизонтальной поверхности (рис. 3.10). В этом случае сложное движение тела можно разложить на поступательное движение со скоростью центра масс
Рис 3.10 (точки О) и вращательное движение вокруг оси, проходящей через точку О, с угловой скоростью ω. Заметим, что при отсутствии скольжения эти скорости (υ и ω) связаны друг с другом известным соотношением υ = ω r. Действительно, (см. рис. 3.10), если за про-
межуток времени t тело |
перемещается из положения I в положение II, |
его центр масс проходит |
расстояние OO′=υ t благодаря тому, что все |
точки дуги АВ приходят в соприкосновение с поверхностью, по которой катится тело. Поэтому длина дуги АВ, равная произведению угла поворота Δϕ на радиус тела R, совпадает с расстоянием ОО′ или (ВА′): Δϕ R = S. Разделив обе части этого равенства на промежуток времени t с учетом того, что
162

ϕ |
= ω и |
S |
=υ, получим ω R = υ. Кинетическая энергия тела в данном |
|
t |
t |
|||
|
|
случае складывается из двух частей: поступательной и вращательной:
W = |
mυ2 |
+ |
Iω2 |
, υ= ωR . |
(3.56) |
|
|
||||
k |
2 |
2 |
|
|
|
|
|
|
|||
При вращении твердого тела вокруг неподвижной оси реузльтирующий момент внешних сил (∑Mriâíåø )ZZ ′ , который
i
обозначен M ZâíåøZ ′ , выполняет определенную
работу. Найдем работу результирующего момента внешних сил. Пусть (рис. 3.11) тело за элементарный промежуток времени dt
повернулось вокруг оси ZZ′ на элементарный угол dϕ. На элементарную массу (ма-
териальную |
точку) тела |
mi при вращении |
|
|
|
r |
|
тела действует внешняя силаFi . Элементарная |
|||
Рис 3.11 |
|
r |
→ |
|
|
||
работа этой силы при перемещении массы |
mi на dSi |
δAi = Fi |
dSi . Учиты- |
→
вая то, что перемещение dSi направлено по касательной к окружности вращения материальной точки массы mi , приведенное выше выражение для
элементарной работы записывается в следующем виде:
|
δAi |
= Fi cosαidSi =(Fi )τdSi , |
(3.57) |
где (Fi )τ — проекция вектора силы Fi на касательную к окружности |
|||
вращения массы mi , |
т.е. |
тангенциальная проекция вектора силы Fi . |
|
Величину перемещения |
dSi |
представим в виде произведения: |
dSi = ri dϕ, |
где ri — радиус окружности вращения данной точки тела. С учетом этого выражение для элементарной работы внешней силы Fi , приложенной к точке
массой mi твердого тела, предстает в следующем виде: |
|
δAi =(Fi )τridϕ. |
(3.58) |
На основании (3.14) произведение (Fi )τ ri является величиной момента силы Fri относительно оси вращения, т.к. входящая в выражение (3.14) вели-
163
чина r в данном случае совпадает с ri . Поэтому (3.58) может быть записано в следующем виде:
δAi =(Mi )ZZ ′dϕ. |
(3.59) |
Если сложить выражения типа (3.59) для всех внешних сил, приложенных к разным точкам тела, получим элементарную работу результирующего момента внешних сил:
N |
N |
|
′dϕ = M âíåø′ |
|
|
|
δA = ∑δA = ∑ (M |
) |
dϕ. |
(3.60) |
|||
i |
i=1 |
i ZZ |
|
ZZ |
|
|
i=1 |
|
|
|
|
|
|
В соответствии с этим выражением, работа результирующего момента |
||||||
внешних сил за конечный промежуток времени |
t = t2 |
– t1 |
получится при |
|||
интегрировании (3.60) по времени в пределах от t1 до t2: |
|
|
||||
t2 |
t2 |
|
|
|
|
|
A = ∫ |
δA = ∫M ZâíåøZ ′ dϕ. |
|
(3.61) |
|||
t1 |
t1 |
|
|
|
|
|
Изучая динамику вращения твердого тела вокруг неподвижной оси, нельзя не заметить, что существует определенная аналогия между величинами, описывающими поступательное движение твердого тела (или движение материальной точки) и его вращательное движением вокруг неподвижной оси. Например, мерой инертности при поступательном движение является масса тела m, в то время как при вращательном движении — момент инерции тела; отмеченные величины подобным образом входят в основные законы динамики. Ниже приведена таблица соответствующих величин при сравнении поступательного и вращательного движений твердого тела.
164

|
|
|
|
|
|
|
|
Таблица 3.1 |
Поступательное движение |
Вращательное движение |
|||||||
|
|
|
Сила |
|
Момент силы |
|||
|
|
|
F |
|
M = rr×F |
|||
|
|
масса |
|
Момент инерции |
||||
|
|
|
m |
|
|
I |
||
Основной закон динамики |
Основной закон динамики |
|||||||
|
F =mar |
|
M = Iβ |
|||||
|
Импульс |
|
Момент импульса |
|||||
|
P =mυ |
|
L = Iω |
|||||
|
|
|
|
|
|
|
r |
|
Закон сохранения импульса |
Закон сохранения момента импульса |
|||||||
r |
r |
|
r |
âíåø = 0 |
|
|
|
r |
P = ∑Pi = const , F |
L = ∑L = const M âíåø = 0 |
|||||||
|
|
|
|
|
i |
|
|
|
|
|
|
|
Кинетическая |
энергия |
|
|
|
|
W |
|
= mυ2 |
|
W = |
Iω2 |
|
|
|
|
|
|
|||||
|
k |
2 |
|
k |
2 |
|
||
|
|
|
|
работа |
|
|||
|
|
|
|
Элементарная |
|
|
|
|
|
δA = F dS |
|
δA = M dϕ |
|||||
3.3ДОПОЛНИТЕЛЬНЫЙМАТЕРИАЛ
3.3.1Движениевнеинерциальныхсистемахотсчета
3.3.1.1 Силыинерцииприпоступательномдвижении неинерциальнойсистемыотсчета
Законы Ньютона и все вытекающие из них следствия выполняются только относительно инерциальных систем отсчета. Определяющим является тот факт, что, если тело имеет ускорение a относительно инерциальной системы отсчета, то ускорение этого тела относительно произвольной другой, но обязательно инерциальной системы отсчета тоже равно a . Т.е. ускорение тела относительно произвольных инерциальных систем отсчета одно и то же. Это легко показать, если рассмотреть движение материальной точки М относительно двух инерциальных систем отсчета (рис. 3.12), одна из которых, обозначенная К, условно покоится, а другая, обозначенная К′, движется относительно первой с постоянной
скоростью υ, направленной вдоль их общей оси X (или X′). Пусть в начальный момент времени t = 0 обе системы совпадали (совпадали точки О и О′). В мо-
мент времени t радиус-вектор материальной точки М в системе К есть r , в системе К — r ′. Вектор ОО′ = υt по величине равен расстоянию, пройденному
системойК′запромежутоквремениt. Каквидимизэтогорисунка,
r = r ′+υt |
(3.62) |
165

Рис. 3.12 |
Рис. 3.13 |
Если вычислить производную по времени от равенства (3.62), получим:
|
|
|
|
|
u =u′+υ, |
(3.63) |
|
где ur = |
dr |
— скорость материальной точки М относительно системы отсче- |
|||||
dt |
|||||||
r |
dr |
′ |
|
|
|||
′= |
|
|
|||||
та К; u |
|
|
|
— скорость материальной точки М относительно системы от- |
|||
dt |
|
|
|||||
счета К′.
Равенство (3.63) называется законом сложения скоростей.
Если вычислить производную по времени от равенства (3.63), придем к тому, что
a = a′, |
(3.64) |
так как υ = const и ddtυ = 0 , (ar = ddut ,ar′= ddtu′). Получили отмеченное выше утверждение: ускорение материальной точки относительно различных инерциальных систем отсчета одинаковое.
Если будем описывать движение материальной точки в системе отсчета, движущейся относительно инерциальной системы отсчета с ускорением, то придем к другому результату. Эти последние системы отсчета называются неинерциальными. В простейшем случае неинерциальная система отсчета движется с ускорением (относительно инерциальной системы отсчета), но поступательно.
Пусть неинерциальная система отсчета К′ движется относительно r
инерциальной системы К поступательно с постоянным ускорением w . Движение материальной точки М можно наблюдать и описывать относительно систем К или К′ (рис. 3.13). Допустим, что в начальный момент времени t = 0 обе системы совпадали и скорость системы К′ была рона 0. В момент времени t радиус-вектор материальной точки М относительно системы К есть
166
r ′ r′ r = r′+ →′ ′
r относительно К — r . Как видим из рисунка, r r OO . Вектор ОО равен по величине расстоянию, пройденному системой К′ за время t с нулевой начальной скоростью и постоянным ускорением w , т.е.
→ |
′ |
r t2 |
|
|||
|
|
|
|
|
||
OO |
= w 2 , |
|
||||
|
|
|||||
тогда |
|
r t2 |
|
|||
r r |
′ |
|
||||
r = r |
+ w 2 . |
(3.65) |
||||
|
||||||
Вычислив производную по времени от обеих частей равенства (3.65), |
||||||
получим |
|
|
|
|
|
|
u =u +wt . |
(3.66) |
|||||
После вычисления производной по времени (3.66) получим |
|
|||||
a = a′+ w, |
(3.67) |
|||||
где a — ускорение материальной точки в инерциальной системе отсчета К,
a′ — в неинерциальной системе отсчета К′, которая движется поступа- r
тельно относительно К с постоянным ускорением w .
Таким образом, ускорения материальной точки (тела) в инерциальной и неинерциальной системах отсчета разные. В случае, когда неинерциальная система движется поступательно с постоянным ускорением, разность ускорений материальной точки относительно К и К′ равна ускорению неинерциальной системы:
a −a′= w . |
(3.68) |
Законом динамики, или динамическим уравнением движения материальной точки массой mrв инерциальной системе отсчета является второй закон Ньютона: mar = ∑Fi , где Fi — силы, действующие на материальную
i
точку в этой системе отсчета. После подстановки (3.67) в уравнение движения получим
r |
r |
(3.69) |
m(a′+ w) = ∑Fi , |
||
|
i |
|
откуда |
r |
|
r |
(3.70) |
|
ma = ∑Fi −mw . |
||
i
167
Равенство (3.70) является законом динамики (динамическим уравнением движения) материальной точки относительно неинерциальной системы отсчета. Оно отличается от соответствующего уравнения движения в инерциальной системе отсчетаr (второго закона Ньютона) наличием дополнительного слагаемого −mw. Это слагаемое, равное со знаком минус произведению массы материальной точки и ускорения неинерциальной системы при ее поступательном движении, называется силой инерции:
r |
(3.71) |
Fèí = −mw. |
С использованием обозначения (3.71) динамическое уравнение дви-
жения материальной точки относительно неинерциальной системы от-
счета (3.70) приобретает следующий вид:
mar = ∑ Fi + Fèí . |
(3.72) |
i |
|
Равенство (3.72) утверждает, что произведение массы материальной точки и ее ускорения в неинерциальной системе отсчета равно векторной сумме всех сил, действующих на материальную точку, сложенной с дополнительной силой (или силами) инерции, выступающей в данной неинерциаль-
ной системе. Если неинерциальная система отсчета движется непоступатель- r
но, то выражения (3.71) и (3.72) тоже справедливы, но величина w уже не
будет являться ускорением всей неинерциальной системы отсчета. В этом r
случае равенство (3.68) также удовлетворяется и, значит, вектор w является разностью между ускорениями материальной точки в инерциальной и неинерциальной системах.
Надо особо отметить, что силы инерции Fèí не являются силами в
полном смысле этого слова, так как они не характеризуют действия тел друг на друга, а только вносят влияние движения неинерциальной системы на описание движения тела. Поэтому силы инерции иногда называют фиктивными силами; они используются для описания движения материальной точки (тел) только относительно неинерциальных систем.
168

Рис 3.14
(сила тяжести mgr и сила натяжения нити
Рассмотрим разницу между описаниями движения тела в инерциальной и неинерциальной системах отсчета на конкретном примере. Возьмем в качестве тела маленький шарик массой m, подвешенный на нити к вертикальному стержню, перпендикулярному тележке (рис. 3.14). Если тележка движется без ускорения (рис. 3.14, а), то нить принимает вертикальное положение, и силы, действующие на шарик
N ) взаимно уравновешиваются.
Если тележка движется с ускорением w (рис. 3.14, б), нить находится под определенным углом α к вертикали. Как в этом случае описывается движение шарика в инерциальной и неинерциальной системах отсчета? В инерциальной системе К (неподвижная система) выполняется второй закон Ньютона: равнодействующая сил mg и N сообщает шарику ускорение wr :
F=mgr+ N =mwr .
Внеинерциальной системе отсчета К′, неподвижно rсвязанной с тележкой, шарик находится в состоянии покоя. Но силы mg и N , действующие на
шарик, не уравновешивают друг друга. Чтобы ответить на вопрос, почему шарик покоится при действии неуравновешивающих друг друга сил, вводим
дополнительную силу инерции Fèí , равную по величине иr противоположную по направлению векторной сумме реальных сил mg и N :
F = −F = −(mgr+ N ) . |
(3.73) |
èí |
|
При учете этой силы инерции векторная сумма сил в системе К′ равна
нулю:
Fèí + F = Fèí +mgr+ N = 0.
чае ar′В=соответствии0. с динамическим законом движения (3.72), в этом слу-
В неинерциальных системах отсчета не существует замкнутых систем тел, т.к. силы инерции являются внешними силами. В результате этого в не-
169

инерциальных системах отсчета не выполняются законы сохранения импульса, момента импульса, энергии.
3.3.1.2 Центробежная сила. Сила Кориолиса
Пусть неинерциальная система отсчета К′ вращается вокруг неподвижной оси с постоянной угловой скоростью ω. В этом случае на тело, движение которого описывается относительно системы К′, «действуют» особые силы инерции. Рассмотрим только простейшие случаи, когда тело или покоится относительно системы отсчета К′, или движется перпендикулярно угловой скорости.
|
1. Центробежная сила. Ее надо |
|
|
учитывать, описывая движение тела от- |
|
|
носительно вращающейся неинерциаль- |
|
|
ной системы независимо от того, покоит- |
|
|
ся тело в этой системе или движется. Рас- |
|
|
смотрим центробежную силу на примере |
|
|
шарика (см. предыдущий параграф), за- |
|
|
крепленного на платформе, вращающейся |
|
|
вокруг неподвижной вертикальной оси с |
|
|
угловой скоростью ω (рис. 3.15). Инер- |
|
|
циальная система К покоится. При вра- |
|
|
щении платформы нить, на которой за- |
|
Рис. 3.15 |
креплен шарик, находится в отклоненном |
|
от вертикали положении. На шарик дей- |
||
ствуют две силы: mg и Nr |
||
. Относительно инерциальной системы отсчета К |
шарик вращается вокруг неподвижной оси с угловой скоростью ω. По второму закону Ньютона
mar =mgr+ N = F ,
где ar — нормальное (центростремительное) ускорение шарика относительно инерциальной неподвижной системы отсчета К. Оно направлено к центру
окружности — точке О, его величина a = υ2 =ω2R .
R
Относительно неинерциальной системы отсчета К′, которая вместе с платформой вращаетсяr с угловойr скоростью ω, шарик неподвижен. Вектор-
ная сумма сил mgr+ N = F , действующих на шарик, не равна нулю. В соответствии с уравнением движением тела в неинерциальной системе отсчета (3.72) в случае a′= 0 получим равенство: , где, согласно
(3.71) и (3.68),
170
r |
r |
r′ |
r |
Fèí = −mw |
= −m(a |
−a ) = −ma. |
|
значит, величина силы инерции в данном случае |
|
||
F |
=mω2R , |
(3.74) |
|
èí |
|
|
|
вектор Frèí направлен против вектора a , т.е. по радиусу от центра. Эта сила
инерции, равная по величине mω2R и направленная по радиусу окружности вращения от ее центра, называется центробежной силой.
2. Сила Кориолиса. Необходимость введения этой силы инерции вытекает, например, из следующего опыта. Пусть снова имеем платформу, вращающуюся с постоянной угловой скоростью ω вокруг вертикальной оси. Положим в центр платформы маленький шарик m и толкнем его в направлении радиуса платформы, сообщая шарику начальную скорость υ0
(рис. 3.16, а). Траекторией шарика будет являться не радикальная прямая, а определенная кривая линия. Относительно инерциальной неподвижной системы отсчета сложное движение шарика состоит из движения в радиальном направлении относительноr платформы со скоростью u′ и движения тех точек платформы, через которые шарик последователь-
но проходит. Результатом сложения скоростей в каждый момент времени и является наблюдаемая траектория. Шарик движется под действием двух сил: силы тяжести и силы реакции опоры — платформы. Относительно неинерциальной системы отсчета — платформы — ее движение отсутствует. Поэтому своеобразная траектория шарика объясняется действием дополнительной силы. Эта сила инерции, как можно показать,
r |
r |
|
FK =2mu′×ω, |
(3.75) |
|
называется силой Кориолиса.
В формуле (3.75) u′ — скорость тела (шарика) относительно системы К′ в каждой точке движения тела; ω — угловая скорость вращения системы отсчета К′.
Согласно (3.75) направление FK определяется векторным произведе-
нием, или правилом правого винта. В случае, изображенном на рис. 3.16, а, эта сила поворачивает траекторию шарика. Если изменить опыт таким образом, чтобы в начальный момент времени шарик имел скорость относительно
171
системы отсчета К′ по окружности вращения вокруг точки О′, то, по (3.75), сила Кориолиса будет направлена по радиусу от центра О′ (рис. 3.16, б).
Земля является, строго говоря, неинерциальной системой отсчета, вращающейся с запада на восток вокруг оси, проходящей через географические
полюса, с угловой скоростью ω= |
2π |
7 10−5 ñ−1 . При описании дви- |
24 ×3600 |
жения тел относительно Земли с большой точностью нужно учитывать силы инерции, в частности центробежную и силу Кориолиса. Действие центробежной силы на тела, находящиеся на поверхности Земли, приводит к зависимости ускорения свободного падения от географической широты местности (вместе с другой причиной — формой Земли). Действие силы Кориолиса на тела, движение которых наблюдается с Земли, ведет к ряду эффектов, например: при свободном падении тел в северном полушарии кориолисова сила «действует» на восток, благодаря чему в этом случае наблюдается отклонение тел к востоку; если тело движется вдоль меридиана в северном полушарии, сила Кориолиса «действует» в правую сторону относительно движения; если тело движется вдоль меридиана в южном полушарии, сила Кориолиса «действует» в левую сторону по отношению к направлению движения; при движении тела вдоль параллели на восток сила Кориолиса направлена от Земли; при движении тела по параллели на запад кориолисова сила прижимает тело к Земле.
4 МАТЕРИАЛЫ, ИСПОЛЬЗУЕМЫЕ В ПРОЦЕССЕ ОБУЧЕНИЯ
4.1 МАТЕРИАЛЫ К ЛЕКЦИЯМ
Лекция 1 «Динамика вращательного движения»
План лекции
1.Момент силы относительно точки (определение, модуль, плечо момента, направление вектора момента силы относительно точки, частные случаи).Момент силы относительно оси (определение, направление вектора момента силы относительно оси); рассмотреть общий случай взаимного направления силы и оси и выразить момент силы относительно оси через тангенциальную составляющую силы. Примеры.
2.Момент импульса материальной точки относительно точки (определение, аналогия с моментом силы), относительно оси (определение). Основываясь на аналогии с моментом силы, записать окончательное выражение момента импульса относительно оси через тангенциальную составляющую импульса.
3.Закон сохранения момента импульса механической системы. Найти производную (изменение) момента импульса материальной точки по време-
172
ни. Рассмотреть систему материальных точек, дать определение момента импульса системы. Доказать закон изменения момента импульса системы материальных точек и получить из него закон сохранения момента импульса.
Контрольные вопросы
1.Что такое плечо момента силы относительно точки?
2.Чему равен момент силы относительно точки приложения силы?
3.Как направлен момент силы относительно оси?
4.В каком случае момент импульса механической системы не из-
меняется?
Лекция 2 «Динамика вращательного движения» (продолжение), «Движение в неинерциальных системах отсчета».
План лекции
1.Момент импульса тела, вращающегося вокруг неподвижной оси. Найти выражение для момента импульса вращающегося тела, основываясь на определении момента импульса системы материальных точек.
2.Момент инерции (определение момента инерции материальной точки, тела относительно некоторой оси). Получить выражение момента инерции тонкого однородного кольца, записать выражения моментов инерции однородных тел: сплошного цилиндра, стержня, шара. Сформулировать теорему Штейнера.
3.Закон динамики вращения твердого тела вокруг неподвижной оси. Доказать закон, основываясь на законе изменения момента импульса
системы и выражении для момента импульса вращающегося тела.
4.Получить закон динамики относительно неинерциальных систем отсчета, рассматривая движение материальной точки относительно неинерциальной системы отсчета, которая движется поступательного с постоянным ускорением. Ввести понятие сил инерции. Рассмотреть пример.
5.Силы инерции во вращающейся системе отсчета: центробежная сила
исила Кориолиса. Получить выражение центробежной силы, рассматривая вращение платформы, на которой закреплен шарик на нити. Записать выражение силы Кориолиса. Рассмотреть действие двух указанных сил на поверхности Земли.
173
Контрольные вопросы
1.Как направлен момент импульса тела, вращающегося вокруг неподвижной оси?
2.Может ли момент инерции тела относительно оси быть отрицательной величиной?
3.Какая характеристика тела является мерой инертности при вращении тела? при его поступательном движении?
4.Является ли Земля инерциальной системой отсчета?
Вопросы для самоконтроля
Iуровень (репродуктивный)
1.Какая физическая величина называется моментом силы относительно точки? Как направлен вектор момента силы относительно точки, чему равна величина этого вектора? Что такое плечо момента силы?
2.Что такое момент силы относительно оси? Как направлен этот вектор и чему равна его величина?
3.Какая физическая величина называется моментом импульса относительно точки, относительно оси? Как направлены эти векторы и
каковы их величины?
4.Что такое момент импульса системы материальных точек? Как читается закон изменения момента импульса системы материальных точек?
5.В чем состоит закон сохранения момента импульса?
6.Формула момента импульса тела, вращающегося вокруг неподвиж-
ной оси.
7.Дать определения моментов инерции материальной точки, тела относительно некоторой оси. Знать выражения моментов импульса кольца, цилиндра, стержня, шара относительно оси симметрии.
8.Сформулировать теорему Штейнера.
9.В чем состоит закон динамики вращательного движения?
10.Формула кинетической энергии вращающегося тела и тела, катящегося без скольжения. Как вычислить работу момента силы?
11.Какие системы отсчета называются неинерциальными? Что такое силы инерции (формула, их определяющая)? Чему равна центробежная сила, сила Кориолиса?
IIуровень (продуктивный)
1.На основании определения момента силы относительно оси найти его выражение через проекцию силы, перпендикулярную оси, а затем через тангенциальную составляющую силы.
174
2.Найти выражение производной момента импульса материальной точки по времени и, используя его, доказать закон изменения и закон сохранения момента импульса системы материальных точек.
3.Найти выражения для моментов инерции однородного кольца (полого цилиндра) и сплошного цилиндра относительно оси симметрии.
4.Получить выражение для момента импульса тела, вращающегося вокруг неподвижной оси.
5.Доказать основной закон динамики вращательного движения.
6.Найти выражения для кинетической энергии вращательного движения и работы момента силы.
7.Получить закон динамики материальной точки относительно неинерциальной системы отсчета. Получить выражение центробежной силы.
IIIуровень (творческий)
1.Найти момент инерции цилиндра относительно оси, совпадающей с диаметром его сечения.
2.Найти момент инерции прямого конуса относительно его оси симметрии, прямоугольной пластинки относительно оси, перпендикулярной плоскости пластинки.
3.Доказать теорему Штейнера (например, для системы двух материальных точек различных масс).
4.Найти момент импульса сплошного цилиндра, катящегося по горизонтальной плоскости, относительно оси симметрии цилиндра, а также относительно оси, совпадающей с образующей цилиндра, которая в данный момент времени касается плоскости (мгновенная ось вращения).
175