

Стрмех_3часть_рус_1999
.pdf41
x
P P
|
|
|
Q |
dx |
l 1 |
1 |
dx |
dx |
|
|
|
y |
|
|
|
|
|
|
Q |
|
|
|
|
b |
1- 1
М = Ру, потенциальная энергия изгиба:
|
l |
M |
2 |
dx |
l |
P |
2 |
y |
2 |
dx |
|
|
|
P |
2 |
|
L |
|
||
UМ |
|
|
|
|
|
|
|
|
|
|
Y2dx |
(1) |
||||||||
2EJ |
|
|
2EJ |
2EJ |
||||||||||||||||
|
0 |
0 |
|
|
|
|
0 |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Работа поперечных сил: |
|
|
|
|
|
|
|
QdS |
|
|
|
Q |
|
|
|
|||||
|
|
|
|
|
dUQ |
|
|
|
|
|
dx, |
|
||||||||
|
|
|
|
|
|
|
|
2 |
|
2 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где dS = dx
dS
Относительный сдвиг tg при действии Q=1 обозначим через 1, тогда dX
= Q· 1
Потенциальная энергия, равная работе поперечных сил:
dUQ |
|
Q2 1dx |
, |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
||||||||
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
l |
|
|
1 |
|
l |
|
|
|
|
|
|
|
||||
UQ dUQ |
|
|
Q2dx, |
|
|
|
|||||||||||
|
|
|
|
|
|
||||||||||||
|
0 |
|
|
2 |
|
0 |
|
|
|
|
|
|
|
||||
если учесть, что |
Q |
dM |
P |
dx |
, |
|
то |
|
|||||||||
|
|
|
|
||||||||||||||
|
|
|
|
dx |
|
|
dy |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
1P |
2 |
l |
2 |
|
|
|||
|
|
UQ |
|
|
y |
dx |
(2) |
||||||||||
|
|
|
2 |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Работа внешних сил:

|
|
|
|
|
|
|
|
|
|
|
|
42 |
|
|
|
|
|
|
|
|
|
|
|
|
Р |
|
L |
2 |
|
|
|
||
|
|
А Р |
|
y dx , |
|
|
(3) |
|||||||||
|
|
|
||||||||||||||
|
|
|
|
|
|
|
2 |
|
0 |
|
|
|
|
|
||
|
|
|
|
|
|
1 |
|
l |
|
|
|
|
|
|
|
|
|
|
где |
y 2 dx |
|
|
|
||||||||||
2 |
|
|
|
|||||||||||||
из выражения: |
|
|
0 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
Uм + UQ = A, |
|
|
|
|
|
|
|
|||||||
получим: |
|
l |
|
|
|
|
|
|
|
l |
|
|
l |
|||
|
|
P |
|
|
|
|
|
|
1P2 |
|
|
P |
||||
|
|
|
y2dx |
|
|
y 2 dx |
|
y2dx |
||||||||
|
2EJ |
|
2 |
|
2 |
|||||||||||
|
0 |
|
|
|
|
0 |
0 |
|||||||||
или |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
P |
|
l |
|
|
|
|
|
|
l |
l |
|
|||
|
|
y2dx 1P2 y 2 dx |
y 2 dx |
|||||||||||||
|
|
EJ |
||||||||||||||
|
|
0 |
|
|
|
|
0 |
0 |
|
|||||||
|
|
|
|
|
|
|
|
|
||||||||
Принимаем, что в момент потери устойчивости стержень искривляется по синусоиде
x
y asin |
|
, |
которая удовлетворяет граничным условиям задачи: |
|
|||
|
l |
|
|
1)при х = 0; у = 0
2)при x l; у = 0.
Тогда: |
|
|
|
|
|
|
|
|
|
|
y |
|
|
a |
cos |
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
Pa2 l |
x |
|
1 |
Pa2 |
2 l |
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
a2 2 l |
|
x |
|||||||||||||||||||||||||
|
|
sin2 |
|
dx |
|
|
|
|
|
|
|
|
|
|
cos2 |
|
|
|
|
|
|
|
|
|
|
dx |
|
|
|
|
|
cos2 |
|
|
dx |
||||||||||||||||||||
|
EJ |
|
|
|
|
l |
2 |
|
|
|
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
l |
2 |
|
||||||||||||||||||||||||||||
|
0 |
l |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
l |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
II l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
II |
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
II |
l |
|||||||
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
||||
в результате получаем: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
P |
|
l |
|
|
|
|
|
|
1 |
p 2 |
|
|
|
|
l |
2 |
|
l |
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
EJ |
2 |
|
|
|
|
l2 |
|
|
|
|
2 |
|
l2 |
2 |
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
1 |
2 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
EJ |
|
|
|
|
|
|
|
|
l2 |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
отсюда: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
Рк р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
EJ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
умножим числитель и знаменатель на EJ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 EJ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
Рк р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
1 |
|
|
|
|
1 |
2 EJ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
43
Обозначим
2 |
|
|
1 |
|
|
(4) |
|
2 EJ |
|
|
|||
|
1 |
1 |
|
|
|
|
|
l2 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Р к р |
2 E J |
|
2 E J |
|
(5) |
2 l 2 |
l 2 |
|
|||
|
|
|
|
|
|
Чтобы определить значение коэффициента необходимо знать 1, которое зависит от типа соединения отдельных ветвей стойки.
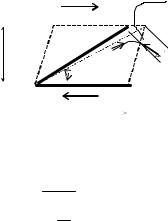
Рассмотрим стойку с ветвями соединенными решеткой
|
|
|
|
Q=1 |
|
пусть длина раскоса d |
|||
|
|
|
|
k |
|
k1 |
|
КК1 |
|
a |
|
|
d |
1 |
|
d |
1 |
||
|
|
|
а |
||||||
|
|
|
|
|
|
n |
|
||
|
|
|
|
|
|
|
|
||
|
|
m |
|
Q=1 |
|
|
поперечную силу воспринимает на себя |
||
|
|
|
|
|
|
|
раскос, удлинение которого: |
||
|
|
|
|
b |
|
||||
|
|
|
|
|
|
|
|
||
Npd
d EFp , где Np, Fp - соответственно усилие и площадь сечения раскоса
Np |
Q |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos |
cos |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
длина раскоса |
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|||
тогда |
|
|
|
|
|
|
sin |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|||||
|
|
|
|
|
|
d |
|
|
|
|
|
|
, |
|
||||
|
|
|
|
|
|
EF cos sin |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
|||
кроме того |
|
|
|
d = KK1 · cos |
|
|
|
|
|
|||||||||
или: |
|
|
KK1 |
|
d |
|
|
|
a |
|
|
|
|
|||||
|
|
cos |
EF cos |
2 |
sin |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
1 |
1 |
|
|
|
|
|
|
|
(6) |
||||
|
|
|
|
|
EF cos |
2 |
sin |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
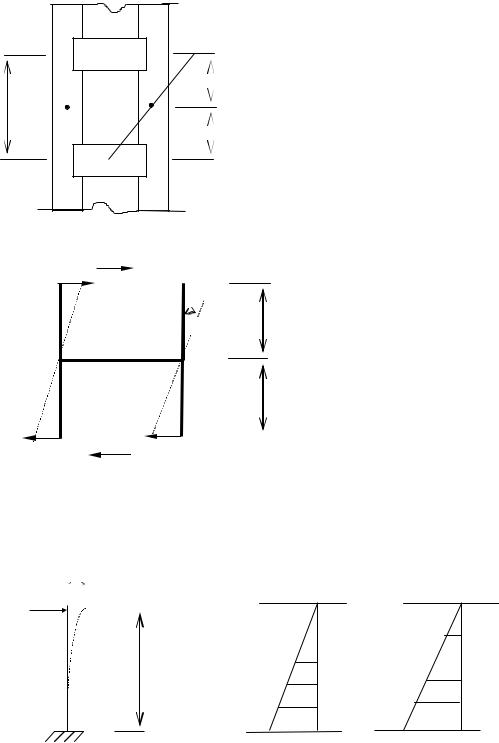
Рассмотрим стойку с ветвями соединенными планками
44
в точках n и n1 изгибающие моменты = 0, действуют только поперечные силы
b/2
b |
n |
n1 |
b/2
Q=1
½ |
1/2 |
n n1
n1
 1 b/2
1 b/2
|
|
|
|
|
|
|
|
b/2 |
|
|
||
½ |
|
Q=1 |
1/2 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||
1 |
tg 1 |
2nn1 |
|
(7) |
||||||||
|
b |
|||||||||||
|
ymax=nn1 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|||
1/2 |
|
|
|
|
|
|
|
|
Mp |
M p |
||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b/2
|
|
|
|
|
|
b/4 |
|
|
|
|
|
|
|
|
|
b/2 |
||||||
|
ymax nn1 |
1 |
|
1 в |
|
в |
2 |
|
в |
в3 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
EJB |
2 |
2 |
|
4 |
3 |
2 |
48EJв |
|||||||||||||||
или |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
1 |
|
|
2в3 |
|
|
|
|
|
|
|
|
|
|
в2 |
|
|
|
||||
|
48 EJ в в |
|
|
24 EJ в |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где Jв - момент инерции одной ветви колонны.
|
45 |
|
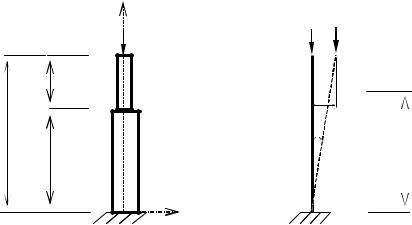
Лекция 10. Расчет на устойчивость колонны ступенчатого сечения |
||
x |
|
|
P |
P |
P |
l1 |
I1 |
|
|
|
|
|
|
M = -P ( - y) |
l |
|
y |
l2 |
I2 |
x |
|
y |
|
Запишем дифференциальное уравнение оси стойки для каждого участка |
||
|
|
d2 y |
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
d2 y |
2 |
|
|
M |
||||||||||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
EJ1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dx2 |
EJ2 |
||||||||||||||
|
|
dx2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
тогда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Р y |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d2 y |
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
||||
или |
|
|
|
|
|
|
|
|
|
|
|
|
dx2 |
|
|
|
EJ1 |
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
d2 y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Py |
|
|
|
|
P |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
аналогично |
|
|
|
|
|
|
|
|
|
|
|
|
dx2 |
EJ1 |
|
EJ1 |
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
d2 y |
|
|
|
|
Py |
|
|
|
|
P |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
|
|
|
||||||||||
обозначим |
|
|
|
|
|
|
|
|
|
|
|
|
dx2 |
|
EJ2 |
|
EJ2 |
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
|
|
||||||
|
|
|
|
|
|
К2 |
|
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
К2 |
|
|
|
; |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
1 |
|
|
EJ1 |
|
|
|
|
|
|
|
2 |
|
|
EJ2 |
|||||||||||||||||||
|
d2 y |
|
|
|
|
|
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
1 |
|
К12 |
у1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(1) |
|
|||||||
|
dx |
2 |
EJ1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
d2 y |
|
|
|
|
|
|
|
|
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
2 |
К |
22 |
у2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(2) |
|
|||||||||
|
dx |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
EJ2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Общее решение дифференциального уравнения (1) |
|
|
|
|
|
|
||||||||||||||||||||||||||||||
y1 C1 sin K1x C2 cos K1x Ф1 |
|
|
|
(3) |
||||||||||||||||||||||||||||||||
частное решение Ф1 = А, подставим его в дифференциальное уравнение (1)
P |
A |
P |
; |
|
А = |
EJ1 |
|
||||
|
EJ1 |
|
|
||

46
y1 C1 sin K1x C2 cosK1x |
(4) |
аналогично
y1 d1 sin K2x d2 cosK2x |
(5) |
Определим коэффициенты уравнений (4) и (5) из граничных условий задачи:
1) |
При Х = 0 |
|
|
|
у2 = 0 |
|
|
|
|
|
|
|
|
0 d2 ; |
|
|
|
d2 = - |
|
|
|
|
|
||
2) |
При Х=l |
|
у1 = 0 |
|
|
|
|
|
|
|
|
|
|
C1 sin K1l C2 cosK1l |
|
|
|
|
|
|
|||||
|
C2 |
C1 tgK1l |
|
|
|
|
|
|
|
|
||
3) |
При Х = l2 |
|
|
у1 = у2 |
|
d sin K |
l |
|
cosK l |
|
|
|
|
C sin K l |
CtgK lcosK l |
2 |
2 |
|
|||||||
|
1 |
1 2 |
1 |
1 |
1 2 |
1 |
2 |
|
|
|
||
|
C1 cosK1l2 tgK1l2 |
tgK1l d1 sinK2l2 |
cosK l2 |
|
(6) |
|||||||
4) При Х = l2
dy1 dy2
dx dx
dy1 C1K1 cos K1x C2 K1 sin K1x dx
dy2 d1K2 cos K2 x d2 K2 sin K2 x dx
C1K1 cos K1l2 K1C1tgK1l sin K1l2 d1K2 cos K2l2 K2 sin K2l2
(7)
C1K1 cos K1l2 1 tgK1ltgK1l2 d1K2 cos K2l2 K2 sin K2l2 ;
Решая совместно уравнения (8) и (9) получим
tgK1l1tgK 2 l2 |
|
K1 |
|
(8) |
|
K 2 |
|||||
|
|
|
|
||
|
|
|
|
|
47
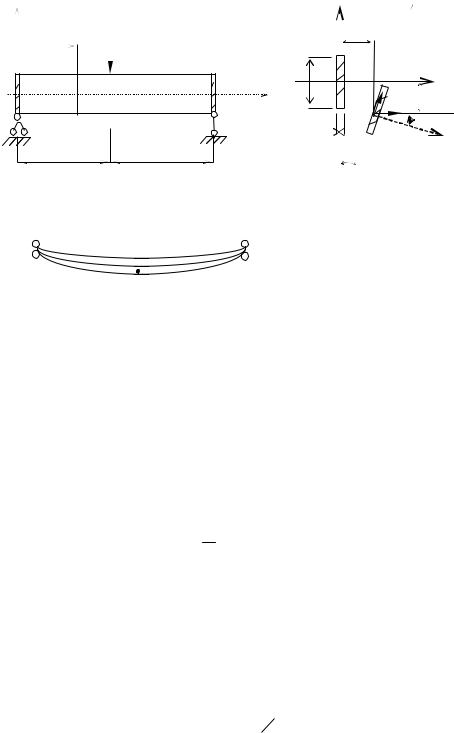
Лекция 11. Потеря устойчивости плоской фермы изгиба тонкой полосы и двутавровой балки
Если тонкая и высокая балка прямоугольного сечения изгибается в главной плоскости с наибольшей жесткостью, то плоская форма изгиба за критическим и нагрузками становится неустойчивой и происходит выпучивание балки.
Рассмотрим тонкую высокую балку, загруженную посредине пролета силой Р
а) |
|
в) |
y |
y1 |
Z |
P |
|
U |
|
|
|
|
|
|
|
Z |
h |
M1(X) |
|
|
|
|
MX |
V |
|
|
|
|
|
l/2 |
l/2 |
|
|
x1 |
|
|
|
|
|
б) |
|
|
|
|
P
В самый начальный момент потери устойчивости некоторое сечение на расстоянии Z от левой опоры повернулось на малый угол , т.е. его новая ось у1 наклонена к вертикали под этим углом. Горизонтальное смещение средней линии сечения = U, вертикальное = V.
Т.е. в момент потери устойчивости, наряду с вертикальным изгибом, появляется изгиб балки в боковом направлении, а также ее кручение.
Определим дополнительную потенциальную энергию накапливаемую полосой в момент потери устойчивости, учитывая боковой изгиб и кручение полосы.
Момент, изгибающий полосу в боковом направлении
My Mx sin ,
учитывая, что угол бесконечно мал sin =
P
My 2 Z
Потенциальная энергия, накапливаемая в результате бокового изгиба
|
|
l |
M y2 dz |
|
P2 |
l |
|
U My |
|
0 |
|
|
|
Z 2 2dz , |
|
2EJ y |
8EJ y |
||||||
|
|
|
0 |
где Jу - момент инерции сечения относительно оси У.
Учитывая, что сила приложена посредине длины балки, возьмем интеграл на половине ее длины и результат удвоим
|
2 |
l |
|
|
2 |
|
|
U My |
P |
Z2 2dz |
(1) |
4EJ |
|||
|
|
0 |
|

48
Определим потенциальную энергию, накапливаемую в полосе за счет ее кручения
|
Мк рl |
|
, |
|
|
||
GJк р |
|
|
|
||||
|
|
|
|
|
|||
или |
Мкр dz |
||||||
d |
|
||||||
|
|
|
, |
|
|||
|
GJк р |
|
|||||
отсюда |
|
d |
|
||||
Мкр GJкр |
. |
||||||
|
|||||||
|
|
|
|
dz |
|||
Потенциальная энергия в элементе бесконечно малой длины
Mкрd dUкр 2 ,
dUк р |
|
GJ |
к р |
d |
|
|
dz |
||
|
2 |
|
||
Умножим это выражение и разделим на dz
dU к р |
GJ |
к р d |
|||
|
|
|
|
|
|
|
2 |
|
|
||
|
|
|
dz |
||
Потенциальная энергия в полосе кручения |
|
|
|
|
|
U к р dUк р |
|
GJк р |
|||
l |
|
l |
2 |
||
или
d .
2
dz .
|
d |
2 |
|
|
|
|
dz |
|
|||
|
dz |
|
|
|
|
|
l |
|
d |
2 |
|
|
|
|
|
|
2 |
|
|
||||
U |
|
GJ |
к р |
|
|
|
dz |
(2) |
|
|
|
||||||||
|
к р |
|
|
dz |
|
|
|||
|
|
|
0 |
|
|
|
|
|
|
Полная потенциальная энергия внутренних сил, накапливаемая полосой после потери устойчивости
|
|
|
|
|
|
|
|
|
|
P2 |
l |
|
l |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
2 |
d |
|
|
|||
|
|
|
|
U U |
|
U |
|
|
|
0 |
z2 2dz GJ |
кр 0 |
|
|
dz |
|
(3) |
|
|
|
|
|
|
|
4EJy |
|
|||||||||||
|
|
|
|
|
|
Му |
|
кр |
|
|
|
dz |
|
|
||||
|
|
|
|
|
|
|
|
|||||||||||
Определим работу внешних сил в момент потери устойчивости полосой |
|
|||||||||||||||||
P |
|
|
|
|
|
|
Ввиду малости перемещений, работа внешних |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
P |
|
|
|
|
|
|
сил при повороте сечения = 0 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Работа Р на перемещении равна
А = Р ,
49
без коэффициента 1/2 т.к. в момент потери устойчивости сила имеет свою постоянную величину.
Перемещение определим оп интегралу Мора:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
|
|
M M |
y |
dz |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
, |
|
|
|
|
|||||||
|
|
|
|
|
|
0 |
|
EJy |
|
|
|
P |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где Му - момент, вызывающий боковой изгиб силой Р : |
My |
|
z ; |
||||||||||||||||||||||
2 |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Му - то же единичной силой : |
М |
|
|
z . |
|
|
|
||||||||||||||||||
у |
|
2 |
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Тогда: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
l |
|
Р |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
0 |
|
z 2 2 d z |
|
|
|
|||||||||||||
|
|
|
|
|
4 E J y |
|
|
|
|||||||||||||||||
или: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
Р |
|
|
l / 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
0 |
|
z 2 2 d z |
|
|
(4) |
|||||||||||
|
|
2 E J y |
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Приравнивая потенциальную энергию внутренних сил работе внешних сил:
|
Р 2 |
l / 2 |
|
|
|
|
|
|
|
|
l |
|
d |
|
2 |
|
|
|
|
Р 2 |
l / 2 |
||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|||||||||||||
|
|
z 2 2 d z G J к р |
|
|
|
|
|
|
|
d z |
|
|
|
z 2 2 d z |
|||||||||||||
|
4 E J y |
|
|
|
|
|
2 E J y |
||||||||||||||||||||
|
0 |
|
|
|
|
|
|
|
|
|
0 |
|
d z |
|
|
|
|
0 |
|||||||||
|
|
|
|
|
l |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
Р 2 |
|
l / 2 |
|
|||||
|
|
|
|
|
2 d |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
G J |
|
0 |
|
|
|
|
|
d z |
|
|
|
|
|
|
|
|
|
z 2 2 d z |
|||||||
|
|
|
|
|
|
|
4 E J y |
|
|
||||||||||||||||||
|
|
|
|
к р |
d z |
|
|
|
|
|
|
|
|
|
0 |
|
|||||||||||
или |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
|
|
d |
2 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
4EJ |
|
|
GJ |
|
р |
|
|
|
|
|
dz |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
y |
|
|
|
к |
|
|
dz |
|
|
|
|
|
|
|||||
|
|
|
|
Р 2 |
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
(5) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z 2 2 dz |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Задаемся выражением для углов закручивания сечений, удовлетворяющих граничным условиям задачи:
|
Asin |
zz |
|
d |
A |
|
|
z |
||
|
|
, |
|
|
|
cos |
|
; |
||
|
|
|
dz |
l |
|
|||||
|
|
l |
|
|
|
l |
||||
1) |
при z = 0 |
|
|
= 0 |
|
|
|
|
|
|
2) |
при z = l |
|
|
= 0 |
|
|
|
|
|
|
50
|
|
|
|
|
2 |
|
l |
|
|
|
|
|
|
|
|
2 |
|
z |
|
||
|
4 EJ y |
G Jк р A |
2 |
|
|
cos2 |
dz |
|||
l |
2 |
|
||||||||
Р 2 |
|
|
|
|
0 |
|
l |
|||
|
l |
|
|
|
|
|
|
|
||
|
|
2 |
|
|
|
|
z |
|
|
|
|
|
A 2 z2 |
sin2 |
|
dz |
|
|
|||
|
|
|
l |
|
|
|||||
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вычислив интегралы:
Ркр |
17,2 |
EJy GJкр |
l2 |
Точное решение
Р |
|
1693, |
|
|
|
|
||
EJ |
|
GJ |
|
|||||
|
l2 |
|
|
|
||||
кр |
|
|
|
y |
|
кр |
||
Для двутаврового сечения:
Ркр l2  EJy EJкр
EJy EJкр
где - коэффициент, определяемый по таблицам справочников.
Лекция 12. Основы динамики сооружений
(6)
(7)
Динамика сооружений - это специальный раздел строительной механики, посвященный методам расчета сооружений на динамические нагрузки.
Динамическими называются нагрузки, которые во время действия сообщают массам сооружения значительные ускорения, вызывая появление инерционных сил.
Классификация динамических нагрузок
1.Неподвижная периодическая нагрузка характерна тем, что она многократно повторяется через определенные промежутки времени. Периодическая нагрузка может быть как непрерывной, так и прерывной.
Если непрерывная периодическая нагрузка изменяется по закону синуса или косинуса, то такая нагрузка называется вибрационной или гармонической.
Создаются такие нагрузки различными механизмами, имеющими неуравновешенные массы вращающихся частей.
2.Кратковременная нагрузка характерна почти мгновенным действием, т.е. быстрым развитием и быстрым исчезновением (взрыв).
3.Ударная нагрузка характеризуется резким изменением скорости ударяемого тела. Ударную нагрузку создают падающие тела, всевозможные копры, молоты и т.д.
4.Подвижная нагрузка постоянного или переменного значения, меняющая свое положение на сооружении (поезда, автомобили, мостовые краны и т.д.).
5.Сейсмическая нагрузка - это беспорядочное движение почвы, толчки, удары и т.д.