

Приклад побудови схем дискретних автоматів
Існує декілька
способів представлення скінченних
автоматів, основними з яких є графічний,
таблично-матричний, аналітичний з
використанням секвенціальних виразів.
Використання даних способів розглянемо
на конкретному прикладі для двох
автоматів (рис. 3). Нехай
необхідно синтезувати автомат, який
імітує роботу деякого дискретного
пристрою за заданим алгоритмом. При
графічному способі опису роботи,
скінченний автомат можна представити
в вигляді направленого графу (рис.
3), вершинами якого являються стани
автомату, а ребрами – комбінації вихідних
сигналів. Як видно з графу(рис.
3а)
,комбінація яка спричиняє перехід
автомату з деякого стану
![]() в стан
в стан![]() ,
який відповідає появі нульового сигналу
на виходіy, повинна
бути
,
який відповідає появі нульового сигналу
на виходіy, повинна
бути![]() .
Причому перейти в стан
.
Причому перейти в стан![]() можна лише зі стану
можна лише зі стану
![]() .Подібним
чином відображаються всі переходи в
дискретному автоматі.
.Подібним
чином відображаються всі переходи в
дискретному автоматі.

Рис. 3. Графічний спосіб завдання дискретного автомата: а – граф для моделі Мура; б – граф для моделі Мілі
Граф (рис. 3,а) відповідає представленню автомата моделлю Мура, так як вихідний сигнал (вказаний в вузлах графу) повністю визначається внутрішнім станом автомату і не залежить від комбінації сигналів на вході. При завданні автомату моделлю Мілі, його вихідний сигнал вказується над кожним ребром графа (рис.3, б), так як залежить не тільки від внутрішнього стану автомату, але і від комбінації сигналів, які подаються на входи автомата в даний момент часу. Замість графів, всю необхідну для синтезу автоматів інформацію можна представити в вигляді таблиць переходів та виходів. Для автомату системи Мура таблиці більш прості (рис. 4,а), так як вихідні значення автомату не залежать від вхідних змінних, а для автомату системи Мілі (рис. 4,б) таблиці більш складні, тому що вихідна функція залежить від аргументів. На перетині рядків і стовбців автоматних таблиць переходів вказується внутрішній стан, в який переходить автомат під дією вхідних сигналів. В таблицях виходів на перетині рядків і стовбців вказуються відповідні вихідні сигнали дискретного автомату.
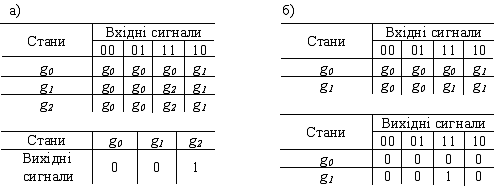
Рис. 4. Таблиці переходів і виходів для моделі Мура (а), та моделі Мілі (б)
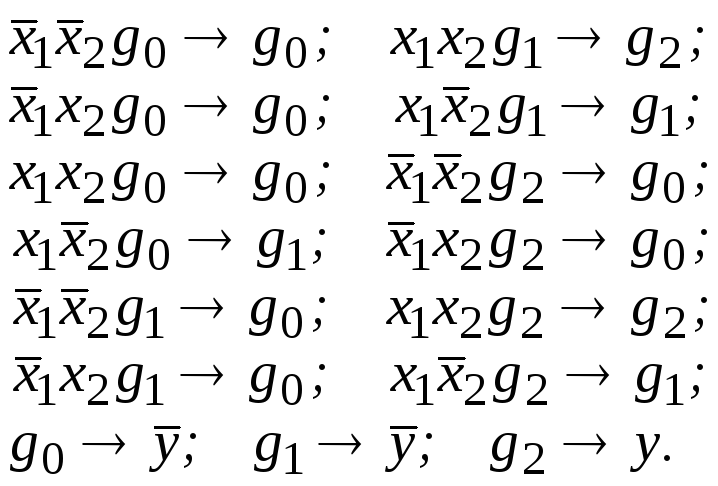
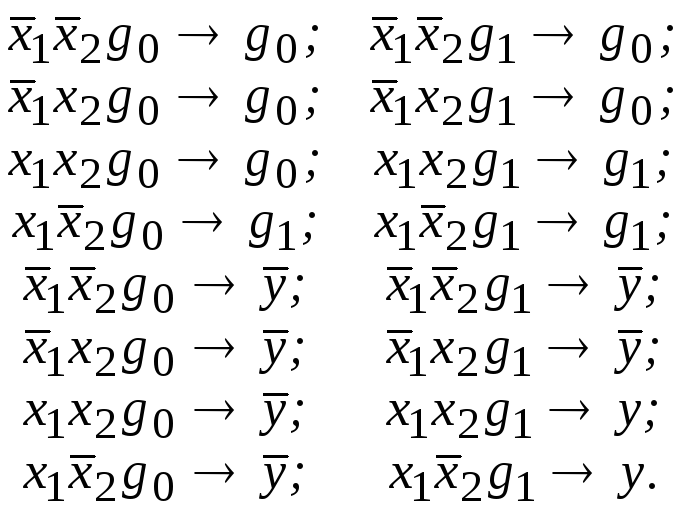
Аналітичний опис автомату передбачає відображення його системою секвенціальних виразів. Секвенціальні описи для автоматів моделі Мура та моделі Мілі будуть мати наступний вигляд:
Для моделі Мура: Для моделі Мілі:
Приведені секвенції є елементарними, так як кожна з них описує лише один перехід, або одну функцію таблиці виходів. Для зручності мінімізації доцільно користуватись скороченими секвенціями, перейти до яких можна наступним чином. Всі елементарні секвенції, які прямують до однієї і тієї ж змінної, записуються через знак диз’юнкції і спрямовуються до даної змінної. При цьому для кожного рівняння спільні множники виносяться за дужки і рівняння будуть мати вигляд:
Для моделі Мура:
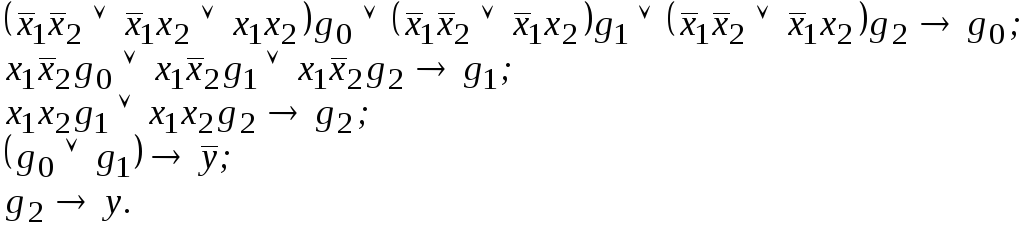
Для моделі Мілі:
З метою отримання найбільш простих виразів скорочені секвенції піддають мінімізації, при виконанні якої необхідно перевірити, щоб отриманні в процесі перетворень скорочені секвенції не суперечили одна одній. Отримані після мінімізації скорочені секвенції мають вигляд:
Для моделі Мура: Для моделі Мілі:
Для побудови на
базі секвенціального опису структури
автомату, необхідна наявність двох
блоків: блока реєстрації переходів, які
описують стан автомату і блока реалізації
функцій виходу. При реалізації переходів,
стани
![]() ,
,![]() ,та
,та![]() необхідно
використовувати в якості перемикаючих
сигналів тригерних схем, які виконують
роль елементів пам’яті.
необхідно
використовувати в якості перемикаючих
сигналів тригерних схем, які виконують
роль елементів пам’яті.
Кожний стан автомату можна фіксувати збудженням одного з тригерів схеми. Однак для зменшення необхідного об’єму пам’яті, зручно будь якому стану автомату поставити в відповідність одну з можливих комбінацій станів тригерних схем (табл. 2):
Таблиця 2