

ТЗА / лекция заочники 1
.docЛекция №1. Тема: Содержание дисциплины и ее связь с другими дисциплинами. Классификация элементов и устройств.
План.
-
История развития дисциплины.
-
Характеристика дискретных элементов.
-
Контактные и бесконтактные элементы.
-
Классификация дискретных устройств.
Методы анализа и синтеза всех классов дискретных автоматов строят на базе алгебры логики. Начало алгебры логики было положено ирландским математиком Д. Булем (1815— 1864 гг.).
Теория дискретных устройств является сравнительно молодой и быстро развивающейся отраслью науки. Ее появление в 30-х годах нашего столетия связано с усложнением и совершенствованием релейных систем управления, когда возникла необходимость в их математическом описании. Новый стимул развития теория дискретных устройств получила в 50-х годах в связи с применением в устройствах управления полупроводниковой техники и вычислительных машин. В настоящее время разрабатываются вопросы теории, связанные с использованием микросхем большой степени интеграции, программируемых логических матриц, микропроцессоров и других достижений современной микроэлектроники.
Основы теории дискретных устройств начали закладываться в 1938—1940 гг., когда советский физик В. И. Шестаков, американский математик К. Шеннон и японский ученый А. Накашима доказали возможность использования булевой алгебры при анализе и синтезе контактных схем. Впервые же указал на такую возможность в 1910 г. русский физик П. Эрнефест.
Большое влияние на развитие теории дискретных устройств оказало создание электронных вычислительных машин (ЭВМ).
ХАРАКТЕРИСТИКА ДИСКРЕТНЫХ ЭЛЕМЕНТОВ
Информация, передаваемая между отдельными узлами (блоками) в системах автоматики, телемеханики и связи, отображается дискретными сигналами. Каждый сигнал: характеризуется определенным параметром, который может иметь два значения: одно из них условно принимают за О, другое — за 1. Для физического представления информации применяют дискретные элементы, которые могут быть в двух состояниях: 0 или 1. Цифры 0 и 1 не дают никакой количественной оценки состояний элемента, они лишь обозначают эти состояния.
Как уже отмечалось, каждому дискретному сообщению соответствует свой дискретный сигнал, представляющий собой некоторую последовательность символов 0 и 1 определенной длины, например 101100111. Эту последовательность символов называют кодовым словом. Его образуют с использованием алфавита, состоящего из двух букв: 0 и 1, называемых соответственно логическим нулем и логической 1. Кодовое слово можно рассматривать как некоторое число в двоичной системе счисления. Следовательно, информация в системах автоматики, телемеханики и связи может быть представлена в виде двоичных чисел, т. е. -каждому дискретному сообщению должно соответствовать определенное число. Двоичные числа представляют в виде комбинации состояний дискретных элементов. Функциональный блок систем автоматики, телемеханики и связи есть совокупность дискретных элементов, соединенных надлежащий образом.
Под дискретным элементом будем понимать некоторую минимальную совокупность деталей, объединенных в общую схему для выполнения какой-либо функции и имеющую релейную характеристику (рис. 1.6). У элемента с такой характеристикой изменение входной величины х вызывает скачкообразное изменение выходной величины г, принимающей лишь два дискретных значения: 0 и 1. У реальных элементов всегда

имеется некоторое различие значений входного параметра (Х1 и х°), при которых происходит изменение выходного параметра с 0 на 1 и обратно с 1 на 0.
Отношение входных параметров, соответствующих обратному и прямому изменениям выходной величины, называют коэффициентом возврата дискретного элемента

Чем ближе к единице значение /Св, тем меньше могут отличаться друг от друга значения входного параметра, соответствующие логическим 0 и 1 . Градации между значениями входного параметра должны быть выбраны с таким расчетом, чтобы находящиеся в пределах норм колебания значений напряжений источников питания, сопротивлений резисторов, емкости конденсаторов, помехи не приводили к неправильной работе дискретного элемента. При высоком коэффициенте возврата легче обеспечить надежную работу дискретного элемента.
В качестве параметров (признаков) входных и выходных сигналов дискретного элемента, как правило, применяют: значение амплитуды тока или напряжения (большая амплитуда соответствует значению сигнала 1 , малая амплитуда — 0); значение сопротивления (равенство сопротивления между двумя зажимами нулю вследствие того, что цепь замкнута накоротко, соответствует значению сигнала 1 ; равенство этого сопротивления бесконечности вследствие разомкнутой цепи соответствует значению сигнала 0).
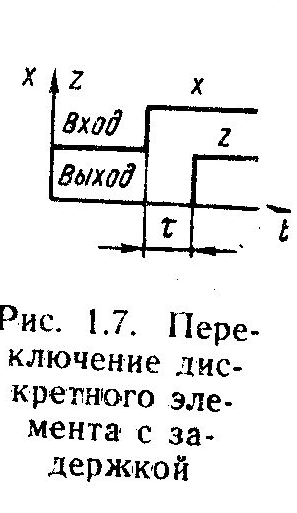
Наряду с указанными выше параметрами в системах автоматики, телемеханики и связи используют частоту тока или частоту следования импульсов, время (продолжительность) отдельных посылок, число импульсов, фазу тока или напряжения. Параметры входных и выходных сигналов дискретного элемента могут быть одинаковыми или различными. Переход элемента из одного состояния в другое может происходить практически мгновенно или с некоторой задержкой (рис. 1.7).
Дискретные элементы могут реагировать на статические сигналы или не на сами входные сигналы, а только на их определенные изменения. Элементы второго типа называют реагирующими на переход. При анализе их работы под «сигналом» подразумевают изменение входных сигналов.
Дискретные элементы могут быть разделены на активные и пассивные. У активных элементов выходные сигналы создаются энергией специальных источников, а входные сигналы служат только для управления, как, например, у транзисторов и электромагнитных реле. В пассивных элементах выходной сигнал формируется энергией входных сигналов, как, например, у полупроводниковых диодов.
Дискретные элементы, способные сохранять свое состояние или выходной сигнал после прекращения действия входного сигнала, вызвавшего переход в это состояние, называют элементами памяти (элементами с фиксацией воздействия). Для перехода такого элемента в новое состояние требуется новое входное воздействие х1 или х° (рис. 1.8).
В общем случае дискретный элемент может быть представлен как n-полюсник, имеющий от 1 до п входов, на которые поступают входные сигналы х и от 1 до z выходов. Дискретный элемент состоит из реагирующих органов, воспринимающих входные сигналы, исполнительных, выдающих выходные сигналы, и промежуточных, перерабатывающих и передающих воздействие от реагирующих органов к исполнительным. Данные органы могут быть или явно выражены, или совмещены. Состояние частей и деталей элемента характеризует его внутреннее состояние, которое в общем случае может принимать n состояний. Двухпозиционные элементы имеют два внутренних состояния, одно из которых обозначают О, а другое—1. Такие элементы называют двоичными. Многопозиционные элементы характеризуются наличием трех и более состояний. Последовательность перехода элемента из одного состояния в другое определяется свойствами самого элемента и последовательностью поступления сигналов на его входы. Например, многопозиционными дискретными элементами являются нейтрально-поляризованные реле, многопозиционные переключатели, шаговые искатели. Нейтрально-поляризованное реле может находиться в трех состояниях, соответствующих отсутствию напряжения на его обмотке, наличию напряжения положительной полярности и наличию напряжения отрицательной полярности.
Дискретные элементы обладают свойством направленности, т. е. передача сигналов возможна только от входа к выходу, в этом случае состояния входов и внутренние состояния элемента не зависят от выходных сигналов. Другим важным свойством элемента является разделительность входов и выходов, заключающаяся в том, что сигнал, поступивший на один из входов (выходов), не вызывает появления сигнала на других входах (выходах).
Все электрические дискретные элементы можно разделить на два класса: контактные и бесконтактные, отличающиеся конструкцией и принципом действия.
КОНТАКТНЫЕ И БЕСКОНТАКТНЫЕ ДИСКРЕТНЫЕ ЭЛЕМЕНТЫ
Контактные дискретные элементы. Исполнительным органом этих элементов является механический контакт между двумя пружинами, приводимыми в соприкосновение механическим перемещением одной из них. Реагирующим органом у контактных элементов могут быть обмотки, создающие магнитное поле, воздействующее через якорь или другие
устройства на контактные пружины; всевозможные механизмы (кнопки, ключи и т. п.), осуществляющие механическое воздействие на контактные пружины при перемещении.
В зависимости от конструкции существуют контактные элементы с памятью и без памяти. Память достигается за счет механического или магнитного удержания элемента в определенном состоянии.
Наиболее распространенным контактным дискретным элементом является электромагнитное реле.. Реагирующим органом реле, воспринимающим внешнее воздействие в виде электрического тока, служит обмотка, исполнительным органом, выдающим выходные сигналы (О — цепь разомкнута, 1 — цепь замкнута) — контакт. Промежуточный орган, передающий воздействие от реагирующего органа к исполнительному, имеет сердечник, ярмо и подвижную часть, называемую якорем, которая приводится в действие электромагнитным потоком и воздействует на контакт. Реле может содержать от одной до восьми контактных групп. Притяжение якоря к сердечнику и замыкание контактов называют срабатыванием реле.
Таким образом, фронтовой контакт является повторителем входного сигнала, а тыловой контакт— инвертором.
Бесконтактные дискретные элементы. Действие этих элементов основано на нелинейном изменении проводимости под влиянием напряжения, тока или магнитного поля, воздействующих на элемент. Например, если на диод (рис. 1.13) подается напряжение прямой полярности (входной сигнал х — 1), сопротивление составляет несколько омов, он открыт, напряжения на выходе и входе равны (выходной сигнал г =1). При подаче на вход напряжения обратной полярности (входной сигнал х — 0) сопротивление диода становится очень большим, диод закрыт, значение напряжения на выходе близко к нулю (выходной сигнал 2 = 0). Как видно, у рассмотренного элемента состояние выхода повторяет состояние входа. Такие элементы называют повторителями.
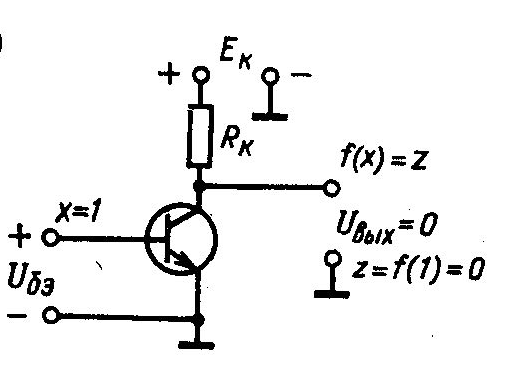
Транзисторы в дискретных устройствах используются в режиме переключения. Транзистор может иметь два состояния: закрытое, соответствующее максимальному сопротивлению между эмиттером и коллектором, и открытое, при котором сопротивление между эмиттером и коллектором минимальное. Переключение транзистора из одного состояния в другое обеспечивается изменением входного сигнала.
Входной и выходной сигналы дискретного элемента на транзисторе с проводимостью типа п-р-п (рис. 1.14, а) имеют значение 1 при положительной полярности этих сигналов. Это схема положительной логики. Она может быть реализована на МОП-транзисторе с индуцированным каналом типа п (рис. 1.14, б). У рассмотренных схем на транзисторах наличие сигнала на входе (х — 1) соответствует отсутствию сигнала на выходе (2 = 0) и наоборот. Схему, выполняющую такую функцию, называют инвертором.
В дискретных элементах на диодах и транзисторах отсутствует четкое разделение реагирующих, промежуточных и исполнительных органов.
КЛАССИФИКАЦИЯ ДИСКРЕТНЫХ УСТРОЙСТВ.
Рассмотренные выше дискретные элементы соединяют между собой определенным образом, образуя сложные дискретные устройства, предназначенные для выработки управляющих воздействий на объекты управления при автоматизации технологических процессов. Управляющие воздействия представляют собой сигналы на выходе сложного дискретного устройства, получающиеся в результате преобразования сигналов, поступающих на вход дискретного устройства и отображающих исходную информацию об объекте управления.
Таким образом, сложное дискретное устройство в системе управления есть преобразователь информации. Материальными носителями информации являются сигналы.
Дискретным автоматом называют модель дискретного устройства, отражающую только его свойства по переработке сигналов. В таком автомате выделяются множества состояний входов а и выходов v, а также внутренних состояний s. Сигналы при этом двухзначные, а элементы памяти двоичные, т. е. каждый с двумя внутренними состояниями.
В зависимости от вида функций выходов, представляющих собой зависимость значений сигналов на каждом выходе от состояния входов а и внутренних состояний элементов памяти в данный момент, дискретные автоматы делят на два класса: комбинационные автоматы и автоматы с памятью.
В комбинационном автомате, называемом также автоматом без памяти, или комбинационным устройством (схемой), каждый сигнал на выходе (логические 0 или 1) определяется лишь сигналами (логические 0 или 1), действующими в данный момент времени на входах автомата, и не зависит от сигналов, ранее действовавших на этих входах. Комбинационный автомат не имеет памяти, он не хранит информации о своей прошлой работе.
Функция выходов для комбинационного автомата
![]()
где
![]() —
сигналы на j-м
выходе автомата в момент времени t;
а(() —
значение сигналов на всех входах автомата
(множество состояний входов).
—
сигналы на j-м
выходе автомата в момент времени t;
а(() —
значение сигналов на всех входах автомата
(множество состояний входов).
На выходе комбинационного устройства формируется сигнал, определяющий совпадение сигналов на входе.
В автоматах с памятью, называемых также последовательностными устройствами, выходной сигнал определяется не только значениями сигналов на входах в данный момент времени, но и его внутренним состоянием. Внутреннее состояние автомата зависит от состояний его элементов памяти. Дискретные устройства с памятью, имеющие конечное число состояний, называют конечными автоматами.
Функционирование автомата, т. е. состояния его входа, выхода и памяти, рассматривается в дискретные моменты времени, интервалы между которыми называют тактами и нумеруют числами натурального ряда О, 1, 2, ..., /. Таким образом, фактически переменной величиной является не само время, а порядковые номера тактов.
В зависимости от того, как определены дискретные моменты времени, в которые рассматривается функционирование автоматов, последние разделяют на синхронные и асинхронные. В синхронном автомате эти моменты определяются синхронизирующими (тактовыми) импульсами, вырабатываемыми специальным генератором. Состояния входа, памяти и выхода автомата рассматриваются только в моменты поступления синхронизирующих импульсов. Во время действия синхронизирующего импульса состояние внутренних элементов памяти не изменяется. Смена состояний внутренних элементов памяти происходит после окончания импульса в интервале и обязательно завершается к моменту поступления каждого следующего синхронизирующего импульса. В асинхронном автомате в отличие от синхронного дискретные моменты времени определяются моментами изменения состояния входа или состояния памяти автомата, а длительность тактов — интервалом времени, в течение которого состояние автомата не меняется.
-
Перелік літератури
|
|
Основна |
|
1. |
Сапожников В.В. и др. Теория дискретных устройств железнодорожной автоматики и телемеханики. М.: 2001. |
|
2. |
Сапожников В.В. и др. Дискретные устройства железнодорожной автоматики, телемеханики и связи. -М.: Транспорт, 1988.-256с. Обесп. 1/3. |
|
|
Додаткова
|
|
2. |
Голсуорт В.В. Проектирование цифровых логических устройств.-М.:Машиностроение, 1985.- 226 с. Обесп. 1 екз. |
|
3. |
Дискретные устройства автоматизированных систем управления /Под ред. Г.Н.Тимонькина.-Харьков, 1990.-511 с. Обесп.1 екз. |
|
4. |
Методичні вказівки Обесп.1/1 |