

Что же такое дух и духовность?
На базе представлений, сформулированных в работе [11], мы можем предложить следующую интерпретацию понятия «Дух» и «Духовность»:
Духесть саморазвивающаяся программа гомеостатического движения (поведения) объекта (субъекта, структуры).
Духовность— это качество (эффективность) исполнения (проявленности) Духа.
Мы подчеркиваем здесь гомеостатический принцип регулированиядвижения (поведения) объекта (субъекта) как гармонизирующий фактор бытия объекта (субъекта) с окружающей средой [20]. Относительно человека, да и других живых объектов, эволюция Вселенной ведет к изменению космофизических параметров, влияющих на процессы жизни. Поэтому каждая единица живого должна, сначала фенотипически, а в поколениях генотипически, менять программу своего как структурного, так и социального движения в соответствии с произошедшим эволюционным развитием окружающего Космоса.
Человек, как биологический объект, является сложной системой, возникшей эволюционно внутри большой метасистемы, которая и определяет цели существования каждого отдельного индивида. Однако для того, чтобы достичь цели своего существования в метасистеме, человек от своего зачатия должен пройти не только путь структурного созревания, но интеллектуально-психологического развития, которые позволят ему направленно организованной деятельностью выполнить свою индивидуальную целевую миссию. Опыт показывает, что человек не осознает цели и задачи своей жизни с приходом в наш проявленный мир, они формируются в процессе становления человека под действием окружающих условий, в том числе и других людей. В процессе решения противоречий в отношениях между людьми и обстоятельствами жизни происходит созревание человека и выполнение (или невыполнение) виртуальной цели существования данного индивида.
Принципы построения шкалы духовности.
Основной исходной предпосылкой построения шкалы духовности мы считаем теорию систем и теорию управления. В этом вопросе мы исходим из кибернетики и её новой ветви – гомеостатики. В данной работе основной акцент мы будем делать на поведении человека, однако, все рассуждения можно относить к движению (поведению) любых других объектов косного и живого мира.
Понятие «Поведение» (conduct,behavior) толкуется каквсё то, что человек делает, или не делает намеренно. Таким образом,поведение — это совокупность актов действия и бездействия, совершаемых человеком. [21,22].
Поведение — активность живого организма, направленная на взаимодействие с окружающей средой[23].
Поведение—целеориентированнаяактивность животного организма, служащая для осуществления контакта с окружающим миром. В основе поведения лежатпотребностиживотного организма, над которыми надстраиваются исполнительныедействия, служащие их удовлетворению [24].
Поведение может быть и коллективным. В последние годы наибольшее развитие получили две конкурирующие парадигмы поведения организации. Первая из них основана на теории систем. Её представители рассматривают организацию, прежде всего, как систему и принимают большинство положений, сформулированных в теории систем [25].
Формирование модели поведения и его реализация требуют определённого набора алгоритмов управления своим организмом. Теория управления обладает аппаратом анализа и математического моделирования различных схем управления.
Построим системную шкалу алгоритмов управления от самых примитивных до сложных форм. Направление порядка возрастания сложности и качества управления даст нам вектор возрастания духа и это станет ядром шкалы духовности.
Каждый последующий новый шаг в освоении алгоритма управления, может включать (или не включать) в себя все предыдущие алгоритмы и их различные сочетания.
Итак, наиболее примитивным способом управления является прямая положительная связь с передачей импульсного типа. Этот тип управления относится к командным (синонимы: директивным, административным, распорядительным) методам.
![]()
Рис. 8. Блок-схема прямой положительной связи.
Разновидность этого управления — использование вместо импульсного сигнала непрерывного способа подачи сигнала управления, т.е. непрерывного директивного воздействия на объект (субъект) управления.
Обобщённо, в этой схеме возможно директивное воздействие, изменяющееся по какому-либо закону (функционалу).
Разновидностями командных методов управления являются методы последовательного передачи приказа (управляющего сигнала) по цепи исполнителей, т.е. каждый предыдущий исполнитель, является начальником последующего. На рис. 9 представлена модель такого метода управления.

Рис. 9. Директивный метод управления в структурах с последовательным исполнением приказа по цепи исполнителей.
Соотношение сигнала на входе системы (приказ) к выходному сигналу (результат исполнение приказа) называется передаточной функцией. Т.о. передаточная функция представляет собой дифференциальный оператор, выражающий связь между входом и выходомлинейной инвариантной во времени системы. Зная входной сигнал системы и передаточную функцию, можно восстановить выходной сигнал.
Передаточная функция в последовательной цепи определяется как произведение передаточных функций каждого отдельного звена:
WΣ(jω)
=W1(p)·W2(p)·W3(p);
где р =![]() ;
;
![]()
Другой разновидностью этого управления является параллельное воздействиеодной директивой двум и более исполнителям:

Рис.10. Модель системы управления с двумя исполнителями.
Передаточная функция параллельного соединения равна сумме передаточных функций составляющих схему. Природа этим пользуется достаточно часто, но как частью схемы управления. Одно дело сумма статических величин 1кт+ 1кт= 2кти ничего нового, другое дело сумма переменных (даже просто синусоид).
Складываем два пассивных звена:
![]()

где k =k1+k2;T=![]() .
.
Получаем функцию идентичную последовательному соединению трех звеньев—двух — стоящих в параллельных цепях, и третья — несуществующего активного дифференцирующего звена первого порядкадля рассматриваемого примера. А в принципе, можно получать структурно несуществующие (виртуальные) звенья с любой заданной характеристикой.
Усложнённой разновидностью командного управления является компенсационный способ управления. Он применяется в системах при наличии внешнего возмущающего воздействия.
В этом случае на вход регулятора попадает сигнал, пропорциональный возмущающему воздействию. Отсутствует зависимость между управляющим воздействием и результатом этого действия на объект.
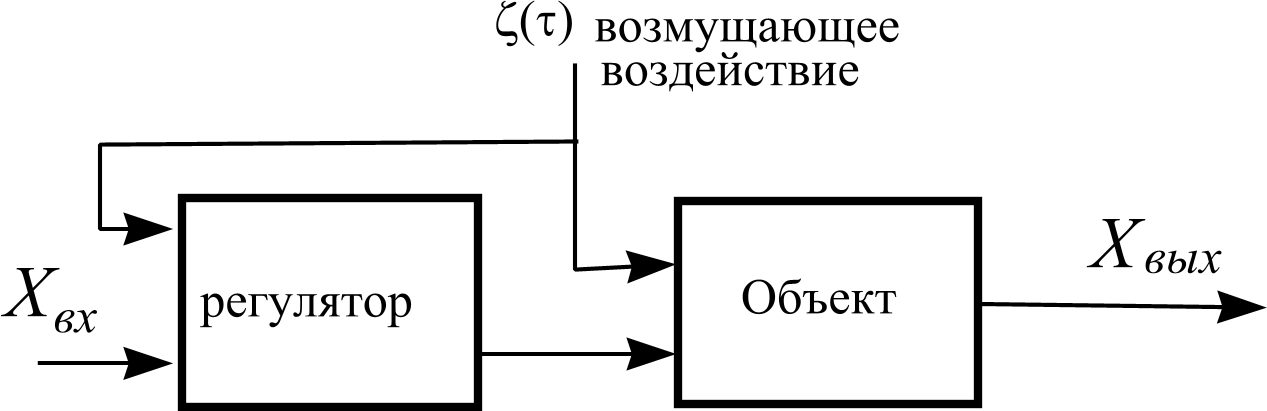
Рис. 11. Компенсационный способ управления.
Новым шагом в управлении является встречно–параллельный способ, или метод управления с отрицательной обратной связью(замкнутый способ управления)
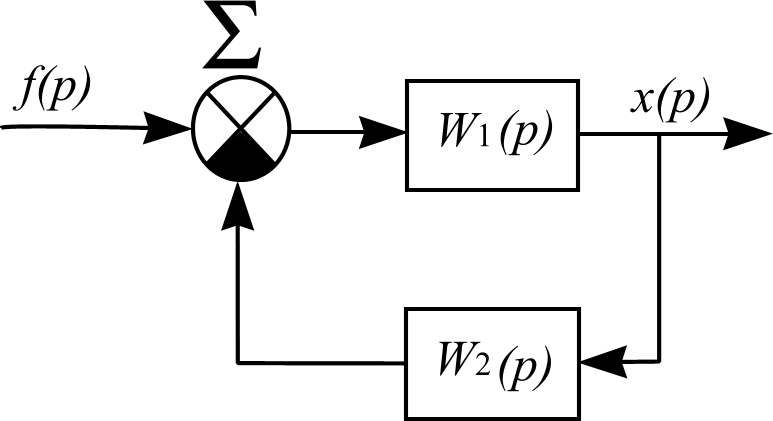
Рис. 12. Модель системы управления с отрицательно обратной связью.
Соединение звеньев в цепь с обратной отрицательной связью обладает суммарной передаточной функцией, вычисляемой как зависимость вида:
![]()
Здесь интересно рассмотреть несколько эффектов:
1) если W1(p)·W2(p)>>1,
то
![]() т. е. при больших значениях исчезает
влияние звена в прямой цепи и свойства
соединения определяются обратными
значениями звена, находящегося в обратной
связи, таким образом, еслиW2(p)
было пассивным, тоWΣобладает эффектом опережения!;
т. е. при больших значениях исчезает
влияние звена в прямой цепи и свойства
соединения определяются обратными
значениями звена, находящегося в обратной
связи, таким образом, еслиW2(p)
было пассивным, тоWΣобладает эффектом опережения!;
2) если W1(p)·W2(p)<<1,
то![]() т.е. при малых значенияхопределяющим
становится звено в прямой цепи, даже
если амплитудные значенияW2(p)
и велики, эффект решает произведение;
т.е. при малых значенияхопределяющим
становится звено в прямой цепи, даже
если амплитудные значенияW2(p)
и велики, эффект решает произведение;
3) при таком виде соединения появляется феномен собственного решения1+W1(p)·W2(p), в цепях с большим количеством элементов достаточно одной обратной связи, чтобы появилосьсобственное решение (одинаковое) не зависимое от положения входа и выхода цепочки, т.е.

Рис. 13. Метод управления в системах последовательной обработки сигнала с обратной связью.
Любой хi(отх1дохn+1) может быть входом или выходом в этой замкнутой цепи; собственное решение (1 +W1…Wn) будет одно и то же, т.е.появляется решение, определяемое структурой(набором активных элементов цепи), а не способом воздействия на систему. Последнее свойство является очень важным условием в системах с адаптивной структурой управления.
Переход от одной структуры к другой может возникать в момент появления определённого собственного решения. Т.е., в зависимости от включения в цепь последовательности различных комбинаций элементов W1,W2, …Wn, линия обратной связи будет выдавать разные собственные решения, которые управляют связанными с ними сочетаниями разных блоков-исполнителей.
Такой механизм работает в нейронных структурах мозга. Активные элементы W1,W2, …Wn— есть последовательность нейронов–представителей анализаторных аппаратов организма, которые включаются в цепь или выключаются из цепи при достижении определенной мощности обрабатываемого информационного потока (в пределах границ нормы реакции). Порог включения–выключения может управляться блоками метаболической и\или информационной потребностей. Возможно участие таких цепочек переработки информации в образовании моделей текущего и прогнозируемого будущего состояний внешней и внутренней среды организма.
Новым, развивающимся направлением современной теории управления является синергетический способ управления [26].
Синергетика(отгреч.συν— «совместно» игреч.εργος— «действующий») —междисциплинарноенаправление научных исследований, задачей которого является изучение природных явлений и процессов на основе принциповсамоорганизациисистем(состоящих изподсистем). «…наука, занимающаяся изучением процессов самоорганизации и возникновения, поддержания, устойчивости и распада структур самой различной природы…».
Синергетика изначально возникла как междисциплинарный подход, так как принципы, управляющие процессами самоорганизации, представляются одними и теми же, безотносительно природы систем и для их описания должен быть пригоден общий математический аппарат.
Синергетический способ управления применяется в нестационарных, диссипативных многопараметрических средах разнородной структуры. Здесь впервые рассматриваются вопросы управления взаимодействием внутренней среды системы с внешней средой, используя прямые и обратные, положительные и отрицательные связи, но без рассмотрения и анализа иерархически вышестоящих подсистем гармонизирующих (управляющих) противоречия между ними.
Синергетика изучает процессы поведения систем и алгоритмы управления в них, опираясь на следующую совокупность понятий:
1) Объектами исследования являются открытые системы в неравновесном состоянии, характеризуемые интенсивным (потоковым, множественно–дискретным) обменом веществом и энергией между подсистем амии между системой с ее окружением.
Конкретная система погружена в среду, которая является также ее субстратом.
2) Среда — совокупность составляющих её (среду) объектов, находящихся в динамике. Взаимодействие исследуемых объектов в среде характеризуется как близкодействие — контактное взаимодействие. Среда объектов может быть реализована в физической, биологической и другой среде более низкого уровня, характеризуемой как газо-подобная, однородная или сплошная. (В составе системы реализуется дальнодействие — полевое и опосредствованное (информационное взаимодействие).
3) Различаются процессы организации, и самоорганизации Общим признаком для них является возрастание порядка вследствие протекания процессов, противоположных установлению термодинамического равновесия независимо взаимодействующих элементов среды (также удаления от хаоса по другим критериям). Организация, в отличие от самоорганизации, может характеризоваться, например, образованием однородных стабильных статических структур.
4) Результатом самоорганизации становится возникновение, взаимодействие, также взаимосодействие (например, кооперация) и, возможно, регенерация динамических объектов (подсистем) более сложных в информационном смысле, чем элементы (объекты) среды, из которых они возникают. Система и её составляющие являются существенно динамическими образованиями.
5) Направленность процессов самоорганизации обусловлена внутренними свойствами объектов (подсистем) в их индивидуальном и коллективном проявлении, а также воздействиями со стороны среды, в которую «погружена» система.
6) Поведение элементов (подсистем) и системы в целом, существенным образом характеризуется спонтанностью — акты поведения не являются строго детерминированными.
7) Процессы самоорганизации происходят в среде наряду с другими процессами, в частности противоположной направленности, и могут в отдельные фазы существования системы как преобладать над последними (прогресс), так и уступать им (регресс). При этом система в целом может иметь устойчивую тенденцию или претерпевать колебания к эволюции либо деградации и распаду. Поведение изучаемых параметров образует так называемые фазовые траектории.
В общем случае для двумерных фазовых траекторий система уравнений имеет вид:
![]()
Здесь t – переменная
(время, численность и т.д.);P(x,
y, t)
иQ(x,
y. t)
– полиномы, определяющие балансное
соотношение зависимостейx(t)
иy(t)
при их изменении в процессе взаимовлияния
(взаимодействия антиподовx(t)y1,y(t)y2).
Состоянию динамического равновесия в
рассматриваемой системе (антиподов) на
фазовой плоскости соответствуют особые
точки
![]() и
особые кривые, состоящие из особых
точек, — сепаратрисы. Их положение
и
особые кривые, состоящие из особых
точек, — сепаратрисы. Их положение
![]() на плоскости определяется решением
системы нелинейных алгебраических
уравнений:
на плоскости определяется решением
системы нелинейных алгебраических
уравнений:
![]()
Характер устойчивости определяется свойствами корней характеристического уравнения:
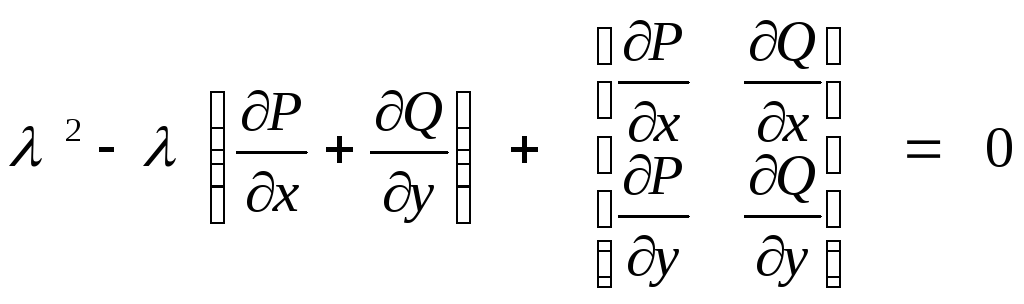 .
.
Значения всех производных берутся в
точках равновесия
![]() .
Его решением служат:
.
Его решением служат:
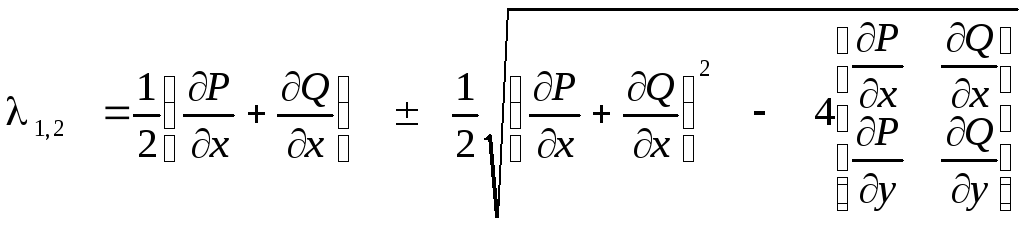
Производные в квадратных скобках определяют собственные частоты колебаний (движений) системы, а сумма производных в круглых скобках – инкремент их нарастания (декремент затухания) вблизи точки равновесия. В соответствии с общей теорией точки устойчивого и неустойчивого равновесия чередуются, а сепаратрисы проходят через точки неустойчивого равновесия.
При анализе устойчивости следует ещё учитывать, что помимо структурной устойчивости движения внутри сепаратрис существует также общая устойчивость макросистемы в целом. Резкое (революционное) структурное изменение даже одного параметра может привести к нарушению устойчивости всей системы в целом, что будет равносильно не эволюционному развитию системы, а инволюционному.
Высшим научно-осознанным управлением на современном этапе развития науки являются методы гомеостатического управления[20].
Гомеостатика как наука возникла в 80-е годы прошлого века и изучает механизмы поддержания жизненно важных параметров организма и трендов его развития.
Гомеостатический способ управления применяется в системах, подсистемы которых имеют противоположно направленные тенденции управления, т.е. обладают внутренними противоречиями. Поэтому, для специального согласования и управления противоположно направленными процессами, в системе созданы специальные блоки регулирования противоположно направленных подцелей подсистем. Анализ естественных систем показал, что все они имеют внутренние противоречия и построены по гомеостатическому типу.
Гомеостат — простейший элемент управления гомеостатического типа состоит из субъекта управления, командующий как минимум двумя исполнителями, работающих в режиме соперничества (или в противоположных направлениях в достижении одной и той же цели) и объекта управления. Выработанные решения двух исполнителей посылаются в объект управления, где происходит их суммация. И уже алгебраически суммарный сигнал отрабатывается объектом. Объединение противоположностей (на определённых условиях) в единую систему по принципу «зеркального» отражения приводит к тому, что каждая из противоположностей становится для другой отрицательной обратной связью, обеспечивающей высокую устойчивость такой системы и самокомпенсацию проникающей помехи, действующей на входы противоположностей, а эта устойчивость и помехозащищённость будут тем большими, чем более симметричны между собой объединённые антагонисты и чем больше между ними величина противоречия.
Условиями объединения («склеивания») противоположностей являются четыре основных положения:
1. Два антагониста, как устойчивые, так и неустойчивые, а также их комбинация могут быть объединены в устойчивую систему, если выполняются необходимые и достаточные условия их «склеивания».
2. Необходимым условием такого «склеивания» является «зеркальное» объединение антагонистов, причём с такими знаками, чтобы для каждого антагониста его «зеркальный» оппонент образовывал цепь обратной связи (в результате получается структура, обладающая как бы двойной отрицательной связью: возможно всего 8 способов «склеивания» антагонистов, удовлетворяющих таким условиям).
3. Достаточным условием «склеивания» является выполнение трёх требований:
Несимметрия параметров антагонистов не должна превышать определённого предела несимметрии;
Несимметрия заданий (приказов), прикладываемых к потенциальным антагонистам, не должна превышать определённого предела несимметрии заданий;
Степень неустойчивости потенциальных антагонистов не должна превышать определённого критического значения.
4. При прочих равных условиях «склеивания» антагонистов значения допустимой несимметрии падают по мере снижения мощности силовых элементов, т.е. снижение потолков (границ нормы реакции системы). При их переходе этого снижения за некоторые границы вообще исчезает возможность для «склеивания» антагонистов.
Р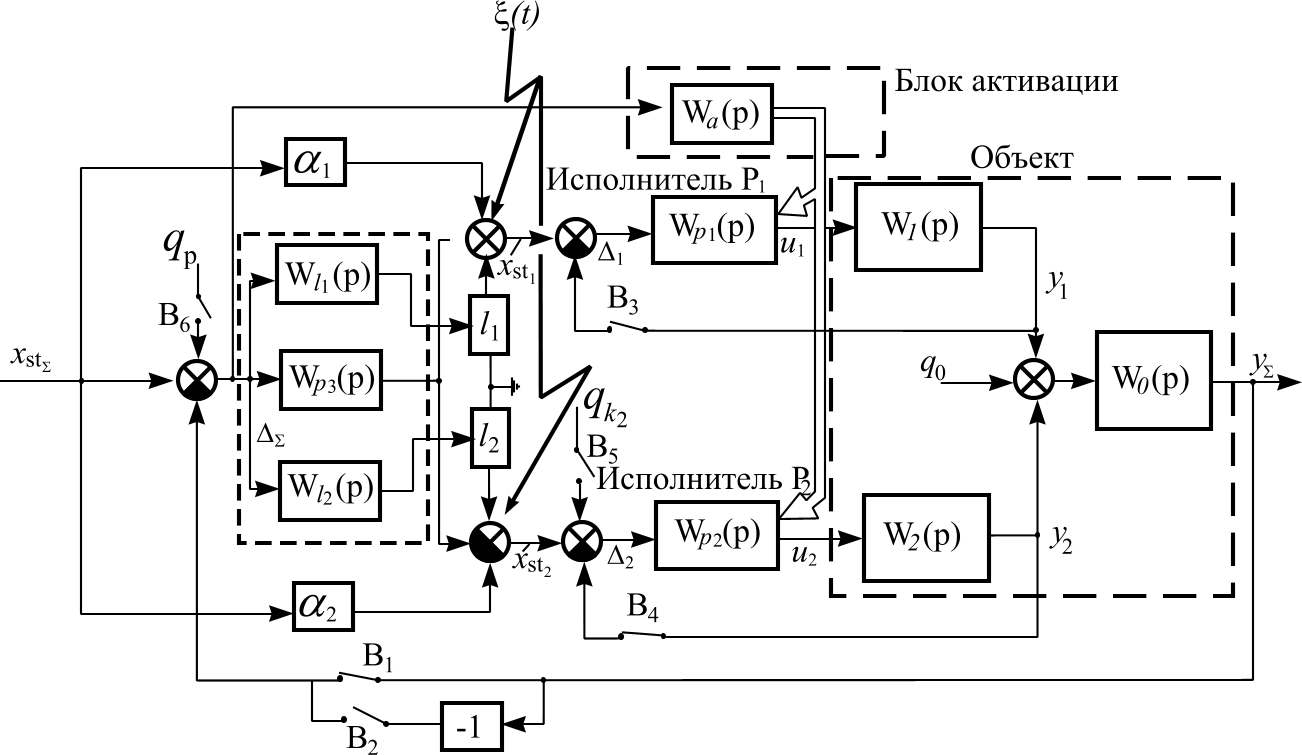 ис.
14. Блок-схема простейшего гомеостата.
ис.
14. Блок-схема простейшего гомеостата.
Исходя из известных положений о работе систем автоматического регулирования с обратной связью, каждую систему неживой (а в некоторых случаях и живой) природы допустимо представлять передаточной функцией, а потенциальными антагонистами считать такие системы, действия которых имеют противоположно направленный характер:
Г![]() деD– коэффициент деления
выходного сигнала.
деD– коэффициент деления
выходного сигнала.
Несимметрия по параметрам определяется как степень различия между передаточными функциями антагонистов или отдельно взятыми параметрами, например, между постоянными времени То. В последнем случае достаточное условие будет иметь вид:
Г![]() деn— допустимый показатель несимметрии
по параметрам.
деn— допустимый показатель несимметрии
по параметрам.
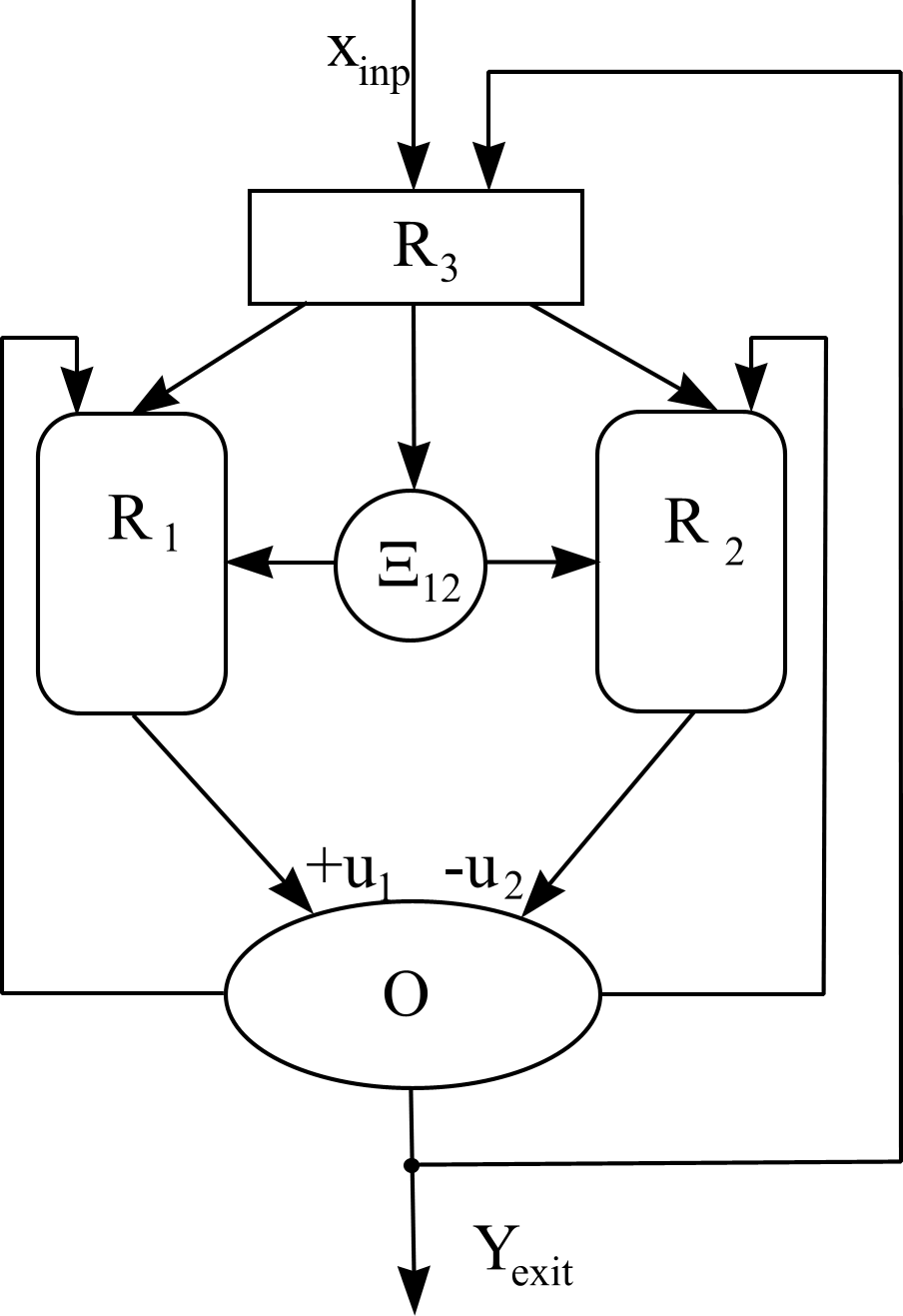
Рис. 15. Принципиальная схема строения простейшего гомеостата.
R3– регулятор-руководитель (шеф), дающий задания регуляторам исполнителямR1иR2, Ξ1,2– противоречия междуR1иR2,регулируемые шефомR3, О – управляемый объект; +u1и –u2–R1иR2, управляющие сигналы объектом О.
Биологические гомеостатические системы принципиально отличаются от технических в значимости соотношений собственных и вынужденных решений. Способность усваивать (встраивать в структуру) информационный носитель приводит к тому, что информация в гомеостатических системах из идеальной формы становится материальной, превращаясь в конструктивный материал, и изменяет структуру системы до тех пор, пока собственные решения и принимаемая системой рабочая информация начинают соответствовать друг другу. Т.о. в результате процесса структурной перестройки собственное решение переходит в вынужденное. При этом возникает, так называемая плата за адаптацию — система не может вернуться к обработке потоков информации в старом режиме. Таковы процессы адаптации биологических систем при стрессе.
Компенсационные же процессы используют запасённые резервы в организме для выполнения задачи, когда оперативных средств отработки сигнала не хватает, например, когда не хватает глюкозы, запасённой в крови, тогда рекрутируется гликоген из печени. Запасённый резерв также является одним из видов противоречия, которое заключается в том, что при обычном функционировании он не нужен, но для его поддержания требуется расход дополнительной энергии.
Естественное от природы управление в биологических системах, включая управление общностью природы и человека, есть высшие известные нам формы гомеостатического регулирования. Поэтому пока шкала духовности завершается на данном осознанном нами уровне управления.
Духовная шкала, таким образом, представляет собой ось ординат (направленная вертикально вверх) имеющая классификационные деления, подразделённые на более мелкие варианты, которые представляют собой включённость различных комбинаций методов управления внутри основных и дополнительных блоков.