

10.6. Матричний метод визначення переміщень за способом Мора-Сімпсона
З розвитком ЕОМ стало можливим виконувати громіздкі обчислення, пов'язані з визначенням переміщень, за допомогою електронних машин. Особливо зручно це робити в тому випадку, якщо обчислення переміщень припускає використовування таких простих арифметичних операцій, як перемножування і складання. Саме на використовуванні таких операцій заснований метод Мора-Сімпсона.
З
курсу лінійної алгебри відомо, що
матрицею називається таблиця, що містить
інформацію у вигляді чисел, розташованих
в певному порядку у вигляді рядків і
стовпців. Наприклад, матриця
![]() має
має
![]() рядків і
рядків і
![]() стовпців:
стовпців:
 .
.
З матрицями можна виконувати деякі операції: складання, віднімання, множення, транспонування та ін. Транспонованою називається матриця, у якої стовпці і рядки міняються місцями:
 .
.
Матриці А і В, що мають однакове число рядків і стовпців, можна складати. В результаті одержимо матрицю С, елементи якої мають вигляд:
![]() ,
,
де
матриця
![]() має
має
![]() рядків і
рядків і
![]() стовпців.
стовпців.
При
перемножуванні матриць слід користуватися
таким правилом: кількість стовпців
матриці А повинна дорівнювати кількості
рядків матриці В. Перемножимо, користуючись
цим правилом, матриці А і D. Матриця
![]() має
має
![]() стовпців
і
стовпців
і
![]() рядків:
рядків:
 .
.
Перемножуючи матриці А і D, маємо:

При цьому закон переміщення не діє:
![]() .
.
Представимо в матричному вигляді одиничні і вантажні згинальні моменти, наведені на рис.10.14 для однієї ділянки.
 ;
;
 .
.
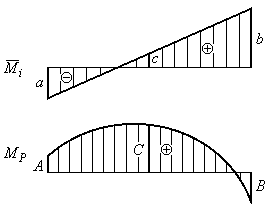
Рис.10.14
Транспонуємо матрицю одиничних моментів:
![]()
і введемо ще одну матрицю В, яку назвемо матрицею піддатливості:
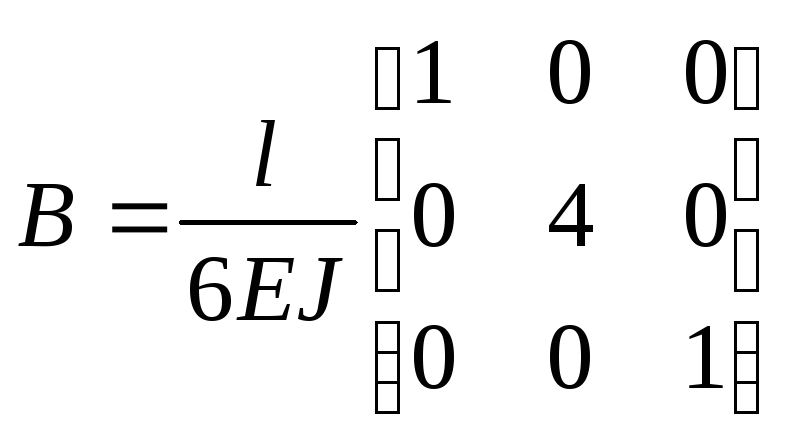 .
.
Перемножуючи
матриці,
![]() ,
,![]() і
і
![]() ,
одержимо переміщення в матричному
вигляді:
,
одержимо переміщення в матричному
вигляді:
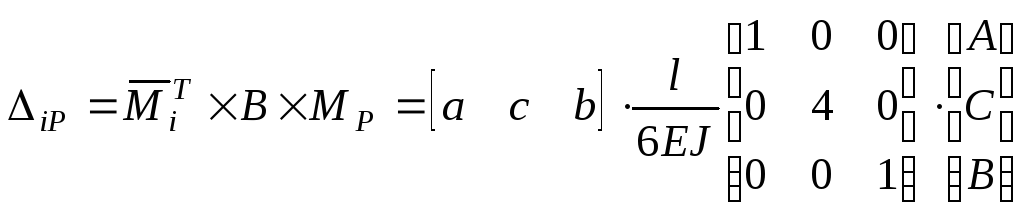 .
.
Легко побачити, що в результаті перемножування матриць переміщення набуває вигляд, який співпадає з формулою Мора-Сімпсона:
![]() .
.
Сформулюємо тепер порядок визначення переміщень за методом Мора-Сімпсона матричним способом за наявності декількох ділянок і при необхідності визначення ряда переміщень, наприклад, прогинів і кутів повороту в декількох перерізах.
1. Зображаємо вантажний стан системи і стільки одиничних станів, скільки переміщень необхідно визначити. Нумеруємо ділянки балки, в межах кожної з яких проставляємо по три “характерні” перерізи: на лівому кінці ділянки, посередині і на правому кінці ділянки. Слід зазначити, що кількість ділянок та “характерних” перерізів на вантажному і одиничному станах балки повинне бути однаковим.
2.
Будуємо епюри
вантажних
![]() і одиничних згинальних моментів, де
і одиничних згинальних моментів, де
![]()
кількість визначуваних переміщень.
кількість визначуваних переміщень.
3. Складаємо матриці вантажних та одиничних згинальних моментів:
 ;
;
 ,
,
де
![]()
кількість “характерних” перерізів.
кількість “характерних” перерізів.
Складаємо матрицю піддатливості В:
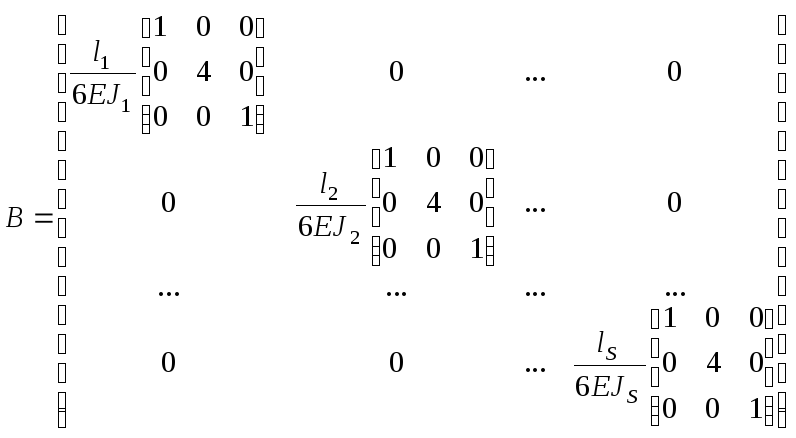 ,
,
де
![]()
кількість ділянок.
кількість ділянок.
4. Обчислюємо переміщення за формулою Мора-Сімпсона, записаною в матричному вигляді:
![]() ,
,
де
![]()
матриця результуючих переміщень:
матриця результуючих переміщень:
 .
.