

7.5. Статика. Центр тяжести. Рычаги и блоки
Часть динамики, изучающая условия равновесия тел, называется статикой ( гр. statos — стоящий).
Равновесием тела называется такое его положение, которое сохраняется без дополнительных воздействий. Опираясь на уравнения динамики поступательного и вращательного движений, можно сформулировать следующие условия равновесия твердого тела.
• Тело не придет во вращательное движение, если для любой оси сумма моментов сил, действующих на него, равна нулю:
• Тело не начнет двигаться поступательно, если сумма сил, действующих на него, равна нулю:
Равенство (7.8) называется правилом моментов.
Условиями равновесия покоящегося тела являются одновременное равенство нулю суммы сил и суммы моментов сил, действующих на тело.
Выясним, какое положение должна занимать ось вращения, чтобы закрепленное на ней тело оставалось в равновесии под действием

В соответствии с правилом моментов для равновесия необходимо, чтобы сумма моментов всех этих сил относительно оси равнялась нулю.
Можно показать, что для каждого тела существует единственная точка, где сумма моментов сил тяжести относительно любой оси, проходящей через эту точку, равна нулю. Эта точка называется центром тяжести (обычно совпадает с центром масс).
Центром тяжести тела (ЦТ) называется точка, относительно которой сумма моментов сил тяжести, действующих на все частицы тела, равна нулю.
Таким образом, сила тяжести не вызывают вращения тела вокруг центра тяжести. Поэтому все силы тяжести можно было бы заменить единственной силой, которая приложена к этой точке и равна силе тяжести.
Для тела спортсмена часто вводится общий центр тяжести (ОЦТ).
Основные свойства центра тяжести:
если тело закреплено на оси, проходящей через центр тяжести, то сила тяжести не будет вызывать его вращения;
центр тяжести является точкой приложения силы тяжести;
в однородном поле тяжести центр тяжести совпадает с центром масс.
Равновесным называется такое положение тела, при которым оно может оставаться в покое сколь угодно долго. При

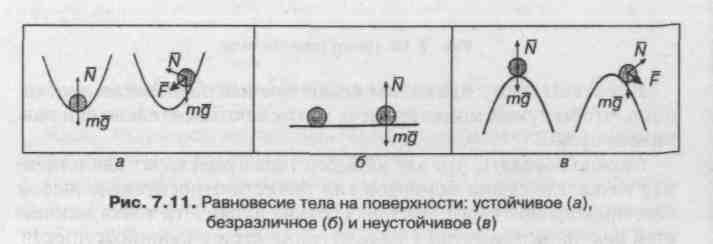
устойчивое равновесие (рис. 7.11, а) — при малом отклонении тела от положения равновесия возникает сила, стремящаяся возвратить тело в исходное состояние;
безразличное равновесие (рис. 7.11, б) — при малом отклонении тело остается в положении равновесия;
неустойчивое равновесие (рис. 7.11, в) — при малом отклонении тела из положения равновесия возникают силы, стремящиеся увеличить это отклонение.
Примером безразличного равновесия является равновесие тела, закрепленного на оси, проходящей через его центр тяжести. Если ось проходит через другую точку и центр тяжести расположен выше оси, то возможно только неустойчивое равновесие. Равновесие будет устойчивым, если центр тяжести расположен ниже оси.
В положении устойчивого равновесия тело обладает минимальной потенциальной энергией.
Рассмотрим теперь равновесие тела, опирающегося не на одну точку, как в примере с шаром, а на целую площадку. В этих случаях условие устойчивости следующее: для равновесия необходимо, чтобы вертикаль, проведенная через центр тяжести, проходила внутри площади опоры тела.
Нарушение этого условия приводит к невозможности сохранения равновесия. Например, цилиндр, представленный на рис. 7.12, а, должен опрокинуться, потому что отвесная линия, проведенная через ЦТ, проходит вне его основания.
Стоящий человек сохраняет равновесие до тех пор, пока отвесная линия из ОЦТ находится внутри площадки, ограниченной краями его ступней, рис. 7.12, б.
Сидящий на стуле человек держит туловище вертикально, рис. 7.12, в. ОЦТ туловища находится внутри тела (близ позвоночника, примерно на 20 см выше уровня пупка). Отвесная линия, проведенная из ОЦТ вниз, проходит через площадь опоры, ограниченную ступнями и ножками стула. В таком положении можно сидеть. Однако, для того чтобы встать, человек должен перенести линию действия силы тяжести внутрь площади, ограниченной ступнями. Для этого необходимо наклонить туловище вперед и одновременно пододвинуть ноги назад (встать можно и не меняя положения ног, если наклон вперед осуществить резко).
Простейшие механизмы
На использовании законов статики основано действие простейших механизмов, используемых для изменения величины или направления силы.
Рычаг — твердое тело чаще в виде стержня, которое может вращаться (поворачиваться) вокруг неподвижной оси.
Пусть ось делит рычаг в отношении L,:L, и на него действуют две параллельные силы F, и F2 (рис. 7.13). Будем также считать, что силой тяжести, действующей на рычаг, можно пренебречь.
Определим положение оси вращения (О), при котором рычаг будет оставаться в равновесии.

Равновесие рычага наступает при условии, что отношение приложенных к его концам параллельных сил обратно отношению плеч

и моменты этих сил противоположны по знаку. Поэтому, прикладывая небольшую силу к длинному концу рычага, можно уравновесить гораздо большую силу, приложенную к короткому концу рычага. В зависимости от взаимного расположения точек приложения сил и оси различают рычаги 1-го и 2-го рода (рис. 7.13):
а) Рычаг 1-го рода. Силы расположены по обе стороны от оси. Подобными рычагами являются длинный шест, с помощью кото рого поднимают тяжелый камень (рис. 7.14.).
б) Рычаг 2-го рода. Силы расположены по одну сторону от опоры. К данному виду относится, например, тачка (рис. 7.15), при использовании которой усилие рук приложено на «максимальном» расстоянии от оси колеса (максимальное плечо), что позволяет пе ревозить большие грузы.

Применение рычага в механизмах дает выигрыш в силе, при этом столько же проигрывается в перемещении. Рычаг не дает выигрыша в работе.
Многие суставы работают по принципу рычага второго рода. При этом мышцы, действуют на меньшее плечо рычага, рис. 7.16. Это приводит к проигрышу в силе, и к выигрышу в перемещении и скорости. В результате, при сравнительно малом по протяженности движении мышцы, звено или конечность описывают значительно большую траекторию.
Эта особенность в строении костно-мышечных узлов должна вызвать дополнительные осложнения в центральном регулировании


Балансир (фр. balancier — коромысло) — двуплечный рычаг, совершающий качатель-ные (колебательные) движения около неподвижной оси. Применяется в балансирующем маятнике, использующемся в механотерапии.
Блок, как и рычаг, относится к простейшим механизмам, рис. 7.17. Он выполняется в форме диска, свободно вращающегося на оси. По окружности диск имеет желоб для цепи (каната, нити). Используется равенство натяжения во всех точках цепи, которая движется без трения.
Неподвижный блок (рис. 7.17, а) не дает выигрыша в силе, но позволяет изменять ее направление. Так, можно поднимать груз вверх, действуя на веревку силой, направленной вниз, что менее утомительно: F — Р.
Подвижный блок (рис. 7.17, б) дает дву-
Для удобства применения подвижный блок часто используют в комбинации с неподвижным (рис. 7.17, в).
Аппараты блокового типа применяются в механотерапии при тренировках по облегчению (восстановлению) движений в суставах и укреплению мышц.
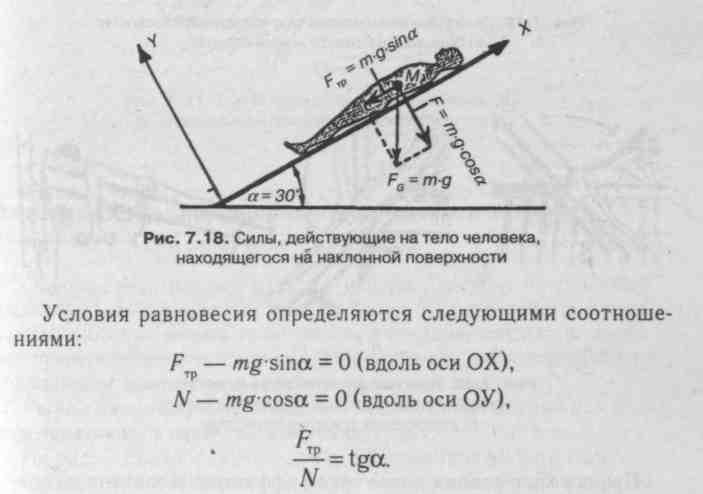
К простейшим механизмам относится и наклонная плоскость. При описании положения тела в этом случае используют прямоугольную систему координат, ось ОХ которой направлена параллельно плоскости, а ось ОУ — перпендикулярно ей. На тело, расположенное на наклонной плоскости, рис. 7.18, действуют сила тяжести mg, сила реакции опоры — N и сила трения F Проекции сила тяжести на координатные оси равны mg-sina (скатывающая сила) и mgcosa.
При движении вниз по наклонной плоскости скатывающая сила помогает движению и способствует значительному увеличению скорости. При заданной длине наклонной плоскости скатывающая сила прямо пропорциональна высоте, рис. 7.19.
Наклонная поверхность часто используется на тренировках при выполнении различных упражнений, рис. 7.20.

Изменение угла наклона и места крепления фиксирующих ремней (на уровне крупных суставов ног, поясничного и грудного отделов позвоночника) позволяет дозировать нагрузку на опорно-двигательную, сердечно-сосудистую и вестибулярную системы.

Элементы механики опорно-двигательного аппарата человека
Опорно-двигательный аппарат человека состоит из сочлененных между собой костей скелета. Кости скелета действуют как рычаги, которые имеют точку опоры в сочленениях или во внешней среде и приводятся в движение силой тяги, возникающей при сокращении мышц, прикрепленных к костям.
Рычаг первого рода, обеспечивающий перемещение или равновесие головы в сагиттальной плоскости.
На рис. 7.22 изображен череп и действующие на него силы.
Ось вращения (О) проходит через сочленение черепа с первым позвонком. На череп действуют две силы, приложенные по разные стороны от оси.
Сила тяжести (/?), приложенная к центру тяжести черепа. Плечо этой силы обозначено буквой Ь.
Сила тяги мышц и связок (F), приложенная к затылочной кости. Плечо этой силы обозначено буквой а.

Сила тяжести (/?), равная половине силы тяжести, действующей на все тело. Плечо этой силы обозначено буквой Ь — расстояние от соединения стопы до точки контакта плюсны и пола (обычно 12 см);Сила тяги мышц (F), передаваемая с помощью ахилловых сухожилий и приложенная к выступу пяточной кости. Плечо этой силы обозначено буквой а — расстояние от точки опоры до точки действия ахилловых сухожилий (обычно 18 см).
Условие равновесия рычага: F-a = Rb. В данном случае а > Ь, следовательно, F < R. Поэтому рычаг дает выигрыш в силе, но проигрыш в перемещении.
По принципу рычага второго рода работает предплечье человека.
На рис. 7.24 изображены предплечье и кисть с грузом, а также действующие на них силы.

Ось вращения (О) находится в локтевом суставе. На рычаг действуют две силы, приложенные по одну сторону от оси.
Сила тяжести (/?), равная весу груза. Плечо этой силы обозначено буквой Ь.
Сила тяги мышц (F), передаваемая с помощью бицепса. Плечо этой силы обозначено буквой а.
Условие равновесия рычага: F-a = Rb. В данном случае а < Ь, следовательно, F > R. Поэтому рычаг дает проигрыш в силе (примерно в 8 раз). Целесообразно ли такое устройство? На первый взгляд, как будто нет, поскольку имеется потеря в силе. Однако согласно «золотому правилу» механики потеря в силе вознаграждается выигрышем в перемещении: перемещение кисти в 8 раз больше

Таким образом, способ прикрепления мускулов, который имеется в теле человека (животных), обеспечивает конечностям быстроту движений, более важную в борьбе за существование, нежели сила. Человек был бы крайне медлительным существом, если бы руки у него не были устроены по этому принципу.
Системы вытяжки костей при переломах
При сращивании сломанных костей необходимо фиксировать поврежденные участки и устранить силы, которые обычно действуют в месте перелома, до тех пор, пока он не срастется. Для этого используют различные комбинации грузов и блоков.
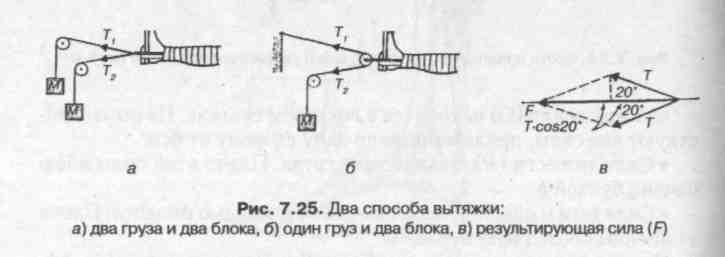
На рис. 7.25, а показана система вытяжки с использованием двух одинаковых грузов и двух блоков. В этом случае силы натяжения 7", и Г2 равны. Те же условия можно создать и другим способом (рис. 7.25, б), используя один груз и комбинацию из подвижного и неподвижного блоков. В этом случае общая сила, действующая на ногу, равна векторной сумме двух сил натяжения (рис. 7.25, в).
9 = 20° к горизонтали. Остальные углы указаны на рисунке. При этом векторная сумма трех сил натяжения, обозначенная на рис. 7.26, б, F, имеет оптимальное направление.
На рис. 7.26, а показана система вытяжки Рассела, применяемая для фиксации сломанного бедра. Эта система получена добавлением к системе, изображенной на рис. 7.25, еще двух блоков для обеспечения связи с коленом. Бедро устанавливается под углом