

СКЕ / 3_Асинхронные двигатели. Регулирование скорости
.pdf5.8.Регулирование скорости асинхронных двигателей
5.8.1.Фазовое регулирование скорости
Одной из эффективных возможностей повышения надежности и экономичности работы электропривода с асинхронными двигателями является использование тиристорных регуляторов напряжения. Схема силовых цепей нереверсивного тиристорного регулятора напряжения приведена на рис. 5.26.
Рисунок 5.26 – Схема силовых цепей нереверсивного тиристорного регулятора напряжения
Схема состоит из трех пар встречно-параллельно включенных тиристоров VS1-VS6, управляемых от системы импульсно-фазового управления (СИФУ)
входным сигналом U у. Изменяя напряжение управления, можно плавно
менять действующее значение напряжения на обмотках статора двигателя.
Добавление в схему рис. 5.26 еще двух пар тиристоров позволяет получить реверсивную схему рис. 5.27, обеспечивающую возможность вращения двигателя в двух направлениях. В тиристорных регуляторах напряжения небольшой мощности вместо пары тиристоров используются симметричные тиристоры – симисторы, а также тиристорные модули различного типа, в том числе оптронные.
99
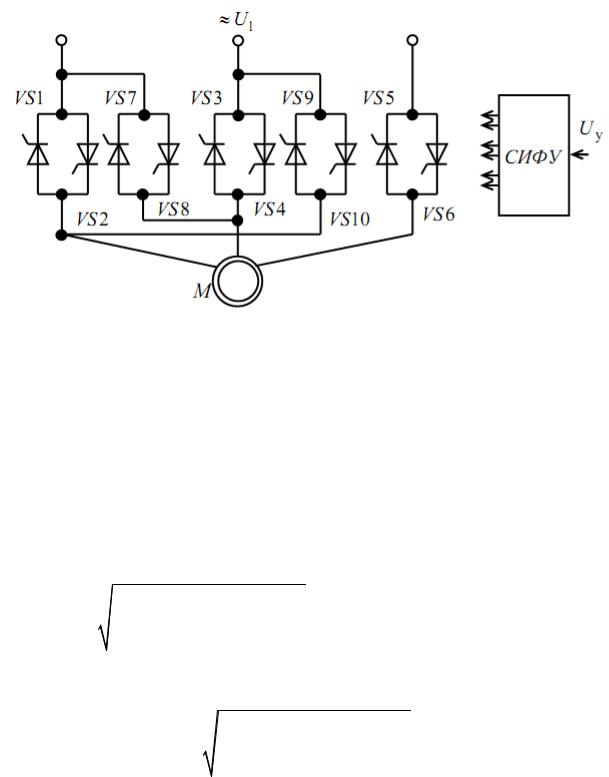
Рисунок 5.27 – Схема силовых цепей реверсивного тиристорного регулятора напряжения
Механическая характеристика асинхронного двигателя при регулировании скорости изменением напряжения определяется выражением
(5.75):
где
M к
M = M к |
|
|
|
2 + asк |
|
, |
|
|
|
|
|
|
|
|
|||||||
|
s |
|
s |
|
|
|
|
|
|
|
|
|
(5.79) |
||||||||
|
|
|
|
|
|
|
+ |
к |
+ as |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
sк |
|
s |
|
к |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
C R' |
|
|
|
|
|
|
|
|
|
|
|||
sк = |
|
|
|
|
|
|
1 |
2 |
|
|
|
|
- |
|
критическое скольжение, |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
2 |
|
|
|
|
|
' |
2 |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
R1 |
+ (X1 + C1X 2 ) |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
m U 2 |
|
|
|
|
|
|
|
|
|||
= ± |
|
|
|
|
|
|
|
|
|
1 |
1 |
|
|
|
|
|
|
|
- критический момент. |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
' |
|
2 |
||||||
|
2ωoC1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
±R1 + |
|
R1 |
+ (X1 + C1X 2 ) |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При снижении |
фазного |
|
напряжения |
синхронная скорость Ω1 и |
|||||||||||||||||
критическое скольжение sк остаются постоянными, а критический момент
двигателя M к уменьшается пропорционально квадрату фазного напряжения.
Соответственно снижается жесткость рабочей части механической
100
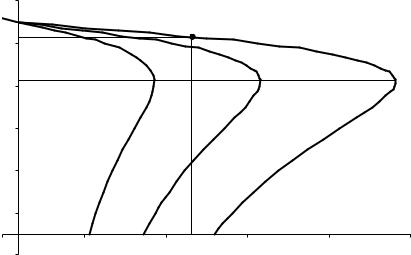
характеристики. При постоянной нагрузке Mc регулирование скорости возможно в диапазоне от ωo до ωo (1− sк ) . Механические характеристики
асинхронного двигателя с короткозамкнутым ротором при изменении напряжения на зажимах статора приведены на рис. 5.28.
ω |
|
U1н U11 U12 |
ωн |
|
|
|
|
|
ωк |
|
|
|
U12 |
U1н |
|
U11 |
|
0 |
M н |
M |
Рисунок 5.28 - Механические характеристики асинхронного двигателя с короткозамкнутым ротором при регулировании напряжения на статоре
При снижении питающего напряжения на 30% критический момент уменьшается примерно в два раза, и при значительном статическом моменте двигатель может оказаться под пусковым током.
В то же время преднамеренное снижение напряжения, подаваемого на обмотку статора, часто используется для регулирования скорости асинхронного двигателя и обеспечения плавности пуска.
Этот способ регулирования наиболее целесообразен в том случае, когда момент сопротивления Mc при снижении скорости существенно меньше номинального момента. Свойством снижения момента сопротивления при уменьшении скорости обладают вентиляторы и центробежные насосы:
Mc = Mo + aω x , |
(5.80) |
где M o - момент, обусловленный силами трения; a - коэффициент; |
x = 2 - |
для вентиляторов; x = 3 - для центробежных насосов. |
|
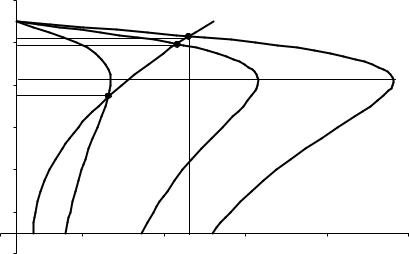
Механические характеристики для случая вентиляторной нагрузки изображены на рис. 5-29.
101
ω |
|
Мc = F (ω ) |
ωωн |
|
|
р1 |
|
|
ωк |
|
|
ωр2 |
|
|
U12 |
|
U |
|
|
1н |
|
U11 |
|
0 |
M н |
M |
Рисунок 5.29 - Механические характеристики асинхронного двигателя с короткозамкнутым ротором при регулировании напряжения на статоре и вентиляторном моменте нагрузки
При расчете подобных приводов необходимо учитывать, что точки,
соответствующие установившемся значениям скольжения или скорости ωн,
ω p1, ω p2 могут соответствовать устойчивому или неустойчивому равновесию.
5.8.2. Особенности прямого пуска асинхронных двигателей
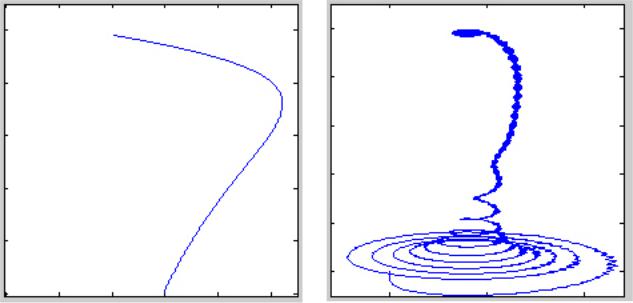
При прямом пуске асинхронных двигателей возникают броски момента. Это связано с особенностями протекания электромагнитных переходных процессов. В качестве примера на рис. 5.30 приведен механическая характеристика, рассчитанная по формуле Клосса (рис. 5.30, а) и полученная путем моделирования системы дифференциальных уравнений, описывающих асинхронную машину (рис. 5.30, б).
Статические механические и электромеханические характеристики асинхронных двигателей благоприятны для пуска асинхронных двигателей прямым включением в сеть. Поскольку пуск двигателя происходит достаточно быстро, то кратковременная перегрузка по току даже в 6-8 раз не опасна для него ни с точки зрения больших ударных динамических моментов, ни с точки зрения больших пусковых токов, которые много меньше пусковых токов естественной характеристики двигателей постоянного тока независимого
102
возбуждения той же мощности. Ограничения на прямой пуск асинхронных двигателей накладываются не самим двигателем, а питающей сетью.
Рисунок 5.30, а – |
Статическая характе- |
Рисунок 5.30, б – |
Динамическая харак- |
ристика асинхронного двигателя |
теристика асинхронного двигателя |
||
Если сеть |
имеет ограниченную |
мощность или |
большое внутреннее |
сопротивление, то пусковые токи двигателя будут вызывать в этой сети большие падения напряжения. Естественно, что это скажется на режимах работы других потребителей энергии. По правилам Госгортехнадзора напрямую можно запускать асинхронные двигатели, если их мощность
Pдв≤ 0.25Sтр, |
(5.81) |
где Sтр - мощность питающего трансформатора подстанции.
При питании осветительной аппаратуры от общей сети асинхронные
двигатели можно пускать прямым включением в сеть, когда |
|
Pдв ≤ 0.05Sтр, |
(5.82) |
Если условия (5.81), (5.82) не выполняются, то необходимо применять токоограничение.
5.8.3. Тиристорные пусковые устройства в электроприводах с асинхронными двигателями
Для снижения нагрузок на электрические сети, повышения надежности и экономичности работы электроприводов с асинхронными двигателями
103
целесообразно использование тиристорных пусковых устройств (мягких пускателей).
Тиристорное пусковое устройство (ТПУ) представляет собой специализированный регулятор напряжения переменного тока с фазовым управлением, предназначенный для регулирования напряжения на статоре при неизменной его частоте.
Пусковые устройства обеспечивают:
∙плавное увеличение и уменьшение напряжения на зажимах асинхронного электродвигателя при пуске в ту или иную сторону вращения ротора электродвигателя и его останове за время от 0.5 до
65 с,
∙динамическое торможение (в устройствах реверсивного исполнения),
∙ограничение начального пускового напряжения на зажимах электродвигателя в пределах от 0 до 0.6,
∙ограничение максимального тока в переходных режимах на уровне от
1.0 до 5 Iн.
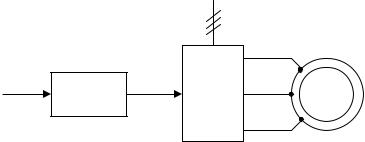
Функциональная схема асинхронного электропривода с ТПУ и задатчиком интенсивности на входе приведена на рис. 5.31.
~ U1
M
U з |
U у |
ЗИ |
ТПУ |
Рисунок 5.31 - Функциональная схема асинхронного электропривода с
ТПУ
Задатчик интенсивности ЗИ , установленный на вход тиристорного пускового устройства ТПУ , формирует темп роста напряжения на обмотках статора асинхронного двигателя М . Как правило, выходное напряжение задатчика интенсивности – линейно-нарастающее, но может быть сформирован и более сложный закон изменения напряжения управления, формирующий не только ускорение привода, но и его рывок.
104

|
dω |
|
Ускорение |
|
при пуске и торможении двигателя определяется темпом |
|
||
|
dt |
|
изменения сигнала U у задатчика интенсивности, причем они связаны между собой зависимостью
dU у |
dω |
|
|
|||
|
= |
|
. |
(5.83) |
||
dt |
dt |
|||||
|
|
зад |
|
|||
|
|
|
|
|
||
dω
Значение ускорения обычно выбирается таким образом, чтобы
dt зад
при известном характере нагрузки Мс и заданном моменте инерции электропривода Jпр, момент двигателя М не превысил допустимого значения
Мдоп. |
|
|
|
|
dω |
|
|
||
М = Мс + |
|
|
≤ Мдоп. |
(5.84) |
|
||||
|
dt |
|
|
|
зад
Таким образом, пуск через ТПУ с использованием задатчика интенсивности позволяет:
∙устранить броски динамического момента на начальном участке пуска;
∙уменьшить максимальное перерегулирование скорости и момента в конце пуска на рабочем участке механической характеристики.
5.8.4. Изменение числа полюсов
Изменение числа пар полюсов позволяет получить ступенчатое изменение частоты вращения. На рис. 5.32 показана простейшая схема (для одной фазы), позволяющая изменять число полюсов обмотки статора в 2 раза.
Схема одной фазы статорной обмотки состоит из двух одинаковых секций 1Н −1К и 2Н − 2К . Если секции соединены последовательно, как это показано на рис.5.31, а, то образуется магнитное поле с четырьмя полюсами,
т.е. 2 р = 4 .
Оставив направление тока тем же, изменим схему соединения обмоток,
как показано на рис.5.32, б. Теперь статорная обмотка образует магнитное поле с числом полюсов 2 р = 2 .
Уменьшение вдвое числа пар полюсов достигается также путем параллельного соединения секций (рис.5.32, в).
105

а) |
2 p = 4 |
б) |
2 p = 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N |
S |
|
N |
|
S |
|
S |
|
|
|
|
N |
||
|
|
|
|
|||||||||||
|
1К |
|
2Н |
|
1К |
|
|
|
2К |
|||||
|
|
|
|
|
|
|||||||||
I |
1Н |
|
|
2К |
|
1Н |
|
2Н |
||||||
|
|
|
|
|||||||||||
|
|
|
|
|
I |
|
|
|
|
|||||
в) |
|
|
|
2 p = 2 |
|
|
|
|
|
|
|
|
|
|
|
S |
|
|
N |
|
|
|
|
|||
|
|
|
|||
|
|
|
|||
|
|
|
|
|
|
|
|
1К |
2Н |
||
1Н |
|
|
|
2К |
|
|
|
|
|||
I 
Рисунок 5.32 - Схемы переключений секций обмоток статора для изменения числа пар полюсов
На практике наиболее часто применяют две схемы переключения обмоток статора многоскоростных асинхронных двигателей: переключение с треугольника на двойную звезду (рис. 5.33); со звезды на двойную звезду.
a ) |
|
U1 |
|
|
|
|
|
б) |
U1 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 5.33 - Соединение обмоток статора в треугольник (а), двойную звезду (б)
В первом случае, при соединении в треугольник (рис.5.33, а), секции соединяются последовательно. При соединении обмоток статора в двойную
106
звезду (рис.5.33, б), секции обмоток соединяются параллельно и число пар полюсов уменьшается вдвое.
При переключении число последовательно включенных витков в каждой фазе уменьшается вдвое, но так как частота вращения возрастает в два раза, ЭДС, индуцированная в фазе, остается неизменной. Следовательно, двигатель при обеих частотах вращения может быть подключен к сети с одинаковым напряжением. Чтобы не осуществлять переключения в обмотке ротора,
последнюю выполняют короткозамкнутой. Если нужно иметь три или четыре частоты вращения, то на статоре располагают еще одну обмотку, при переклю-
чении которой можно получить дополнительно две частоты. Асинхронные двигатели с переключением числа полюсов называют многоскоростными.
Многоскоростные двигатели имеют следующие недостатки: большие габариты и массу по сравнению с двигателями нормального исполнения, а,
следовательно, и большую стоимость. Кроме того, регулирование
осуществляется |
большими |
ступенями: при |
частоте f1 = 50 Гц скорость |
вращения поля |
no при |
переключениях |
изменяется в соотношении |
3000:1500:1000:750.
В сериях асинхронных двигателей 4А-6А выпускаются двух-, трех- и
четырехскоростные двигатели. Применяются, в основном, для крановых механизмом и лифтов. Как правило, плавное регулирование скорости для таких электрических машин не применяется, то есть многоскоростные асинхронные двигатели не используются для систем регулируемого электропривода.
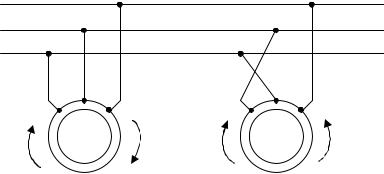
5.8.5. Изменение направления вращения
C |
|
|
|
B |
|
|
|
A |
|
|
|
B1 C1 |
A1 |
B1 |
C1 |
A1 |
|
||
ω |
|
|
ω |
M |
M |
|
|
Рисунок 5.34 - Схемы включения двигателя при изменении направления вращения
107
Для изменения направления вращения ротора электродвигателя надо изменить направление вращения магнитного поля. Для этого необходимо изменить порядок чередования тока в фазах обмоток статора. В трехфазных машинах это осуществляется путем переключения двух любых проводов, подводящих ток из трехфазной сети к фазам этой обмотки (рис. 5.34).
5.9. Регулирование скорости асинхронных двигателей изменением частоты питающего напряжения
5.9.1. Преобразователи частоты для электроприводов переменного тока
Способы частотного регулирования скорости электроприводов переменного тока с короткозамкнутыми асинхронными двигателями находят все большее применение в различных отраслях техники. Преобразование переменного напряжения питающей сети в переменное напряжение с регулируемой частотой, напряжением и током осуществляют преобразователи частоты.
В настоящее время преобразователи частоты выполняются на базе силовых полупроводниковых ключей – тиристоров и транзисторов. Значительное увеличение выпуска преобразователей частоты стало возможным с появлением биполярных транзисторов с изолированным затвором, рассчитанных на токи до нескольких тысяч ампер, напряжения до нескольких киловольт и частоту коммутации 20 кГц и выше.
По типу связи с питающей сетью преобразователи частоты делятся на два больших класса:
∙преобразователи частоты с непосредственной связью (НПЧ),
∙преобразователи частоты со звеном постоянного тока. Преобразователи частоты со звеном постоянного тока, в свою очередь,
подразделяются:
∙автономные инверторы тока (АИТ),
∙автономные инверторы напряжения (АИН)
На рис. 5.35 дана структурная схема автономного инвертора.
108