

СКЕ / 3_Асинхронные двигатели. Регулирование скорости
.pdfM
~ U1
1 |
2 |
3 |
Рисунок 5.35 - Структурная схема автономного инвертора Структурная схема автономного инвертора (рис. 5.35), питающегося от
сети переменного тока, содержит следующие основные элементы: выпрямитель
1; входной фильтр 2, служащий для уменьшения пульсации постоянного тока; собственно преобразователь частоты (инвертор) 3, поочередно подключающий фазы обмотки статора двигателя M к шинам разной полярности.
5.9.1.1. Преобразователи частоты с непосредственной связью
Основой силовой схемы преобразователя частоты с непосредственной связью является реверсивный тиристорный преобразователь. Многофазный выход преобразователя частоты достигается использованием нескольких реверсивных преобразователей с однофазным выходом (рис. 5.36).
Рисунок 5.36 – Система НПЧ – асинхронный двигатель
Выходное однофазное напряжение низкой частоты f1 обеспечивается цикличным изменением углов открытия тиристоров. Коммутация тока тиристорами каждой группы непосредственного преобразователя частоты одного направления осуществляется напряжением сети рис. 5.37.
109
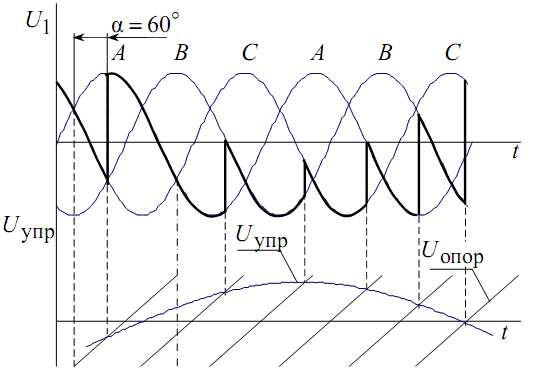
Рисунок 5.37 - Выходное одно фазное напряжение непосредственного преобразователя частоты
На диаграммах напряжения рис. 5.37 управление происходит при переменном угле управления α . Закон изменения управляющего напряжения в непосредственном преобразователе частоты определяется
специальным задатчиком. В рассмотренном случае управляющее напряжение изменяется по синусоидальному закону. В некоторых случаях применяют управляющее напряжение прямоугольной формы.
Большинство непосредственных преобразователей частоты предусматривает совместное согласованное управление реверсивными группами тиристоров. В этом случае для ограничения уравнительных токов служат ограничивающие реакторы что увеличивает массу и габаритные размеры преобразователя, а также снижает его энергетические показатели.
Если каждый из управляемых выпрямителей непосредственного преобразователя частоты охватить глубокими отрицательными обратными связями по току, то преобразователь приобретает свойства источника тока. Таким образом, непосредственные преобразователи частоты могут работать в режиме источника напряжения либо в режиме источника тока.
Достоинством непосредственных преобразователей частоты являются:
110
∙однократное преобразование энергии, что определяет высокий КПД преобразователя;
∙возможность прохождения реактивной мощности как от сети к нагрузке, так и обратно;
∙возможность получения напряжения без гармоник с частотами, кратными частоте питающей сети.
Недостатки:
∙сложность устройств управления. Большое число тиристоров требует большого числа систем импульсно-фазового управления;
∙коэффициент мощности преобразователя существенно меньше единицы ( cosϕ ≈ 0.15 );
∙существенно искажается форма напряжения питающей сети;
∙трудности получения частот, близких к частоте питающей сети. Для нулевой схемы максимальная частота выходного напряжения обычно ограничивается f1max = 16 Гц. Переход к мостовой схеме
расширяет рабочий диапазон до f1max = 25 Гц.
Поэтому асинхронные электроприводы с непосредственными преобразователями частоты применяются для безредукторных электроприводов средней и большой мощности.
5.9.1.2. Автономные инверторы тока
Двухступенчатые преобразовательные устройства выполняются на основе выпрямителя трехфазного переменного напряжения сети и автономного инвертора, преобразующего выпрямленное напряжение в переменное трехфазное с регулируемой частотой и амплитудой. Не смотря на двукратное преобразование энергии и обусловленное при этом некоторое снижение КПД, преобразователи частоты с промежуточным звеном постоянного тока получили наибольшее распространение в регулируемом электроприводе.
Схема силовых цепей трехфазного мостового инвертора тока приведена на рис. 5. 38.
111
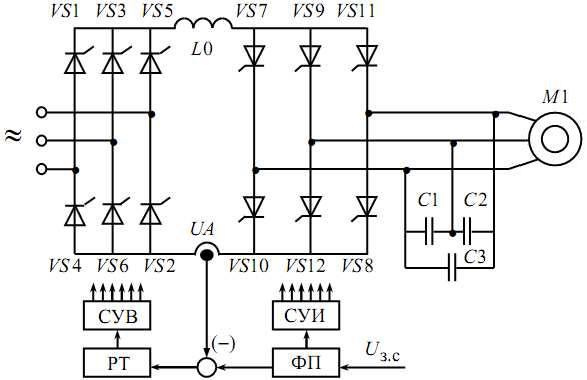
Рисунок 5.38 - Схема силовых цепей трехфазного инвертора тока Условные обозначения, принятые на рис . 5.37 СУВ – схема управления выпрямителем;
РТ – регулятор тока; СУИ – схема управления инвертором;
ФП – функциональный преобразователь.
В автономном инверторе тока управляемый выпрямитель, выполненный на тиристорах VS1...VS 6 , работает в режиме регулятора тока, а инвертор на тиристорах VS 7...VS12 формирует требуемую частоту выходного тока. Фильтр с индуктивностью L0 обеспечивает сглаживание пульсаций выпрямленного тока
Тиристоры инвертора тока VS 7...VS12 , включенные по трехфазной мостовой схеме, пропускают ток в течение 120o электрических градусов.
Переключение производится с периодичностью 60o в последовательности,
соответствующей нумерации тиристоров. Диаграммы токов для каждой из фаз инвертора приведены на рис. 5.39.
112
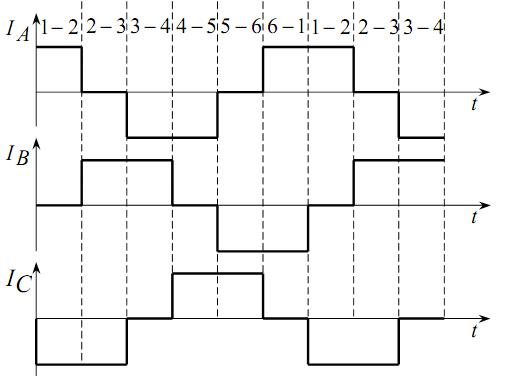
Рисунок 5.39 - Диаграммы токов для каждой из фаз инвертора Коммутация тока и компенсация реактивной мощности осуществляется
конденсаторами на стороне переменного тока. При активноиндуктивной нагрузке на выходе инвертора и на тиристорах VS 7...VS12 в
моменты коммутации могут возникнуть значительные перенапряжения, обусловленные действием ЭДС самоиндукции нагрузки. Их ограничение достигается установкой соответствующих емкостей. При снижении частоты и при постоянном моменте на валу двигателя емкость конденсаторов возрастает обратно пропорционально квадрату частоты.
При переходе двигателя, питаемого от автономного инвертора тока, в
генераторный режим изменяется направление противо-ЭДС инвертора, который переходит в режим работы выпрямителем, что могло бы вызвать увеличение тока в звене постоянного тока. Однако за счет сильной отрицательной обратной связи по току, которой охвачен выпрямитель, ток в звене постоянного тока сохраняется на прежнем уровне, а выпрямитель переводится в режим инвертора, ведомого сетью. Вследствие чего происходит рекуперация энергии в питающую сеть без изменения направления тока в звене постоянного тока.
Таким образом, в автономных инверторах тока легко реализуются тормозные режимы двигателя с рекуперацией энергии в сеть, что делает предпочтительным его применение в реверсивных электроприводах.
113
Основные достоинства преобразователей частоты с автономными
инверторами тока:
∙возможность рекуперации энергии в сеть;
∙близкое к синусоидальной форме выходное напряжение;
∙безаварийность режима короткого замыкания в нагрузке. Недостатки:
∙ограничение выходной частоты на уровне 100-125 Гц;
∙коммутационные перенапряжения на тиристорах, что заставляет усложнять силовую схему;
∙невозможность работы на групповую нагрузку;
∙существенные вес и габариты индуктивного фильтра.
5.9.1.3.Автономные инверторы напряжения
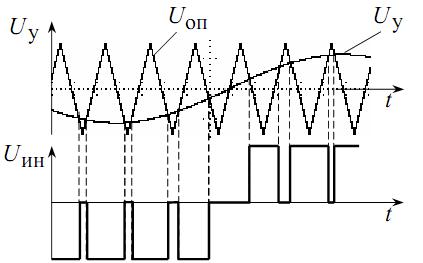
В схеме возможно выключение любого рабочего тиристора в заданный момент времени независимо от состояния других тиристоров, что дает возможность регулировать действующее значение напряжения на нагрузке изменением длительности открытого состояния рабочего тиристора. Такое построение автономного инвертора позволяет использовать для получения постоянного напряжения неуправляемый выпрямитель. Принцип синусоидальной широтно-импульсной модуляции (ШИМ) показан на рис. 5.40.
Рисунок 5.40 - Принцип синусоидальной широтно-импульсной модуляции
При ШИМ-модуляции схема управления определяет моменты коммутации полупроводниковых приборов при равенстве опорного Uоп
114
треугольного напряжения и управляющего U у синусоидального. Для
электроприводов небольшой мощности в последние годы в качестве ключей нашли применение силовые транзисторы типа IGBT и MOSFET .
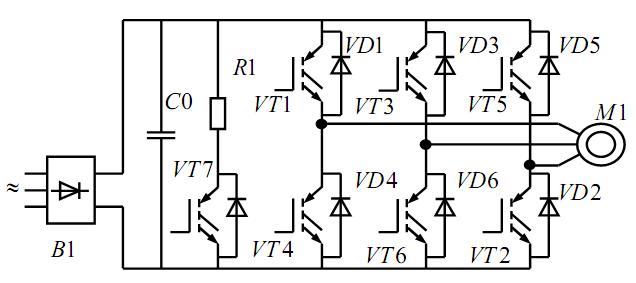
Асинхронный электропривод с автономным инвертором напряжения, выполненным на IGBT -транзисторах, приведен на рис. 5.41.
Рисунок 5.41 - Асинхронный электропривод с автономным инвертором напряжения, выполненным на IGBT -транзисторах
Индуктивный характер нагрузки учитывается подключением параллельно транзисторным ключам VT1...VT 6 диодов VD1...VD6 , обеспечивающих непрерывность цепи протекания тока в обмотках статора при отключении их от источника питания и возврат запасенной электромагнитной энергии в конденсатор фильтра C0 .
Так как IGBT -транзисторы могут переключаться при значительно больших частотах, чем тиристорные ключи, то и форма тока, протекающего через обмотки двигателя становиться значительно ближе к синусоидальной. Очевидно, что чем выше несущая частота ШИМ, тем меньше амплитуда колебаний тока в обмотках статора двигателя. На рис. 5.42 приведены осциллограммы токов статора асинхронного двигателя при низкой и высокой несущей частоте опорного напряжения ШИМ модулятора.
Однако чрезмерное увеличение несущей частоты может при вести к перегреву двигателя и ключей инвертора. Чем выше частота коммутации ключей, тем выше потери энергии в них.
115

Рисунок 5.42 - Осциллограммы токов статора асинхронного двигателя при низкой (а) и высокой (б) несущей частоте опорного напряжения ШИМ модулятора
Ряд электроприводов имеет высокую интенсивность тормозных режимов.
Для эффективного торможения в этих случаях применяется специальный узел сброса энергии, состоящий из дополнительного ключа VT 7 и резистора R1.
Ключ VT 7 открывается при превышении напряжения на емкости C0 сверх допустимого значения, вследствие чего обеспечивается «сброс» энергии в резистор R1, рассеивающий эту энергию в виде тепла.
В структурах электроприводов с автономными инверторами напряжения,
охваченными отрицательной обратной связью по току, инвертор приобретает свойства источника тока.
В электроприводах с автономными инверторами напряжения возможен режим векторного управления, что позволяет использовать их для процессов с повышенными требованиями к динамике и пусковому моменту. Кроме того, эти преобразователи совместно с асинхронными двигателями во многих случаях позволяют заменить более дорогой электропривод постоянного тока.
5.9.2. Принципы частотного регулирования
Изменение частоты питающей сети для регулирования скорости позволяет применять более надежные и дешевые асинхронные двигатели с короткозамкнутым ротором.
Для получения требуемой характеристики двигателя следует изменять не только частоту питающей сети, но и напряжение. Напряжение и частота должны быть связаны таким образом, при котором обеспечивается устойчивая работа двигателя, не происходит чрезмерной перегрузки его по току, магнитному потоку и т. п.
Рассмотрим наиболее распространенные законы управления, применяемые при частотном регулировании.
116
Закон Костенко — характеристики асинхронного двигателя при
частотах питающего напряжения, отличных от номинальной, зависят
от соотношения между напряжением сети U1 и частотой f1.
Зависимость максимального момента от напряжения и частоты
выражается формулой (5.69). Подставляя в нее значение |
ω = |
2π f1 |
, при |
|||||||
|
||||||||||
|
|
|
|
|
|
|
|
o |
p |
|
|
|
|
|
|
|
|
|
|
|
|
C1 = 1 получим: |
|
|
|
|
|
|
|
|
||
|
m U |
2 p |
|
|
|
|
|
|
||
M к = ± |
1 |
1 |
|
|
. |
|
|
|
||
|
|
|
|
|
|
|
|
|
||
|
2 |
' |
2 |
|
|
(5.85) |
||||
|
|
|
+ (X1 + X 2 ) |
|
|
|
|
|
||
|
4π f1 ±R1 + R1 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
Пренебрегая значением R1 в знаменателе, имеем: |
|
|
|
|
|||||||||
|
|
|
m U 2 p |
|
m U 2 p |
|
CU 2 |
|
|
||||
M |
к |
= ± |
|
1 1 |
= ± |
|
1 1 |
|
= ± |
1 |
, |
(5.86) |
|
4π f1 |
' |
2 |
' |
2 |
|||||||||
|
|
|
|
|
|
||||||||
|
|
|
(X1 + X 2 ) |
|
8π f1 |
(L1 |
+ L2 ) |
|
f1 |
|
|
||
где C - постоянная. |
|
|
|
|
|
|
|
|
|
||||
Из (5.86) следует, что при изменении частоты |
f1 изменяется |
||||||||||||
максимальный момент, т. е. отношение максимального момента |
|
M к к |
|||||||||||
нагрузочному моменту M c . |
|
|
|
|
|
|
|
|
|||||
Для устойчивости работы двигателя необходимо обеспечить достаточную
перегрузочную способность |
M к |
1.7 ÷ 2.0. Следовательно, при частотном |
|||||
M н |
|||||||
|
|
|
|
|
|
||
регулировании должно быть обеспечено условие |
|||||||
|
M к |
= |
M кi |
= const , |
(5.87) |
||
|
|
|
|||||
|
M н Mci |
|
|
||||
где индекс «н» относится к номинальной частоте питающего напряжения;
индекс «i» относится к частотам питающего напряжения, отличным от номинальной частоты, т. е. к различным синхронным частотам вращения.
Так как согласно (5.86)
117
M к |
2 |
|
2 |
|
|
|
= |
U1н |
× |
f1i |
, |
(5.88) |
|
M кi |
|
f 2 |
||||
|
U 2 |
|
|
|||
|
|
1i |
1н |
|
|
|
то, исходя из (5.87), (5.88) получаем основной закон частотного регулирования:
U |
= U |
|
f1i |
|
Mci |
. |
(5.89) |
||
|
|
|
|||||||
|
1i |
|
1н |
|
fн |
|
M н |
|
|
При постоянном значении нагрузочного момента |
M ci = M н = const |
||||||||
уравнение (5.89) принимает вид: |
|
||||||||
|
U1i |
= |
U1н |
= const , |
(5.90) |
||||
f1i |
|
||||||||
|
|
f1н |
|
|
|
|
|
|
|
т. е. питающее напряжение следует изменять прямо пропорционально его частоте. При этом мощность двигателя увеличивается прямо пропорционально возрастанию частоты вращения.
При нелинейно-спадающей нагрузке Mci = kωi−1 (режим постоянства мощности) закон управления (5.89) принимает вид:
U1i = U1н |
f1i |
|
k |
× |
ωн |
= U1н |
f1i |
|
f1н |
|
= U1н |
|
f1i |
|
, |
(5.91) |
fн |
|
ω |
k |
f |
|
f |
|
f |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
1н |
|
1i |
|
|
|
1н |
|
|
|
или
|
U1i |
|
|
= |
U1н |
|
|
= const . |
|
|
|
|
|
|
|
|
|
|
(5.92) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
f1i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
f1н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
При |
вентиляторной нагрузке |
M |
ci |
= kω2 |
|
закон управления (5.89) |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
принимает вид: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
2 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
f1i |
|
|
|
|
k ωi2 |
|
f1i |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f1i |
|
|
f1i |
|
|
||||||
U1i = U1н |
|
|
|
|
|
|
= U1н |
|
|
|
|
|
= U1н |
|
, |
(5.93) |
|||||||||||||
|
fн |
k ω2 |
f1н |
f 2 |
f 2 |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
н |
|
|
|
|
|
1н |
|
|
1н |
|
|
||
или |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
U1i |
= |
U1н |
= const . |
|
|
|
|
|
|
|
|
|
|
(5.94) |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
f 2 |
|
|
|
f 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
1i |
|
|
|
1н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
118