

СКЕ / 1_Основные понятия. Трансформаторы
.pdfМИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ УКРАИНЫ НАЦИОНАЛЬНАЯ МЕТАЛЛУРГИЧЕСКАЯ АКАДЕМИЯ УКРАИНЫ
В.Б. Зворыкин
ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА
Утверждено на заседании Ученого совета академии в качестве учебного пособия
Днепропетровск НМетАУ 2014
УДК 681.51
Зворыкин В.Б. Электропривод переменного тока. Учеб. пособие. -
Днепропетровск: НМетАУ, 2014.- 138 с.
Даны основные параметры переменного тока. Описаны устройство, принцип действия, комплексные уравнения и векторные диаграммы трансформатора.
Описаны устройство и принцип действия трехфазного асинхронного двигателя (АД). Приведены математическое описание асинхронной машины при заторможенном и вращающемся роторе,
комплексные уравнения, векторные диаграммы и схемы замещения АД.
Проанализированы механические характеристики, способы регулирования скорости АД и законы частного регулирования.
Описаны преобразователи частоты для регулирования скорости АД. Рассмотрены способы скалярного частотного управления
скоростью АД с введением положительной обратной связи по току и отрицательной обратной связи по скорости.
Материал пособия отражает содержание выборочной дисциплины «Электропривод переменного тока», входящей в программу подготовки специалистов и магистров (очной и заочной форм обучения) по направлению 0925 – автоматизация и компьютерно-интегрированные технологии.
Издается в авторской редакции.
Ответственный за выпуск |
А.П. Егоров, канд. техн. наук, доцент |
Рецензенты: |
Н.Н. Казачковский, канд. техн. наук, профессор |
|
(Национальный горный университет Украины) |
|
В.Г. Акуловский, канд. техн. наук, доцент |
|
(Академия таможенной службы Украины) |
|
© Национальная металлургическая |
|
академия Украины, 2014 |
2
Введение
Асинхронные машины — наиболее распространенные электрические машины. В основном они используются как электродвигатели и являются основными преобразователями электрической энергии в механическую энергию.
Внастоящее время асинхронные электродвигатели потребляют более половины всей вырабатываемой в мире электроэнергии и широко применяются
вкачестве электропривода большинства механизмов. Это объясняется простотой конструкции, надежностью и высоким значением КПД этих электрических машин.
Современный этап развития промышленных приводов характеризуется значительным расширением области применения регулируемых электроприводов переменного тока. Это касается большинства тех отраслей промышленности, в которых ранее использовались электроприводы постоянного тока с двигателями, независимого возбуждения, обладающие лучшими регулировочными свойствами (например, металлообрабатывающая промышленность, бумагоделательная промышленность и др.), а также отраслей, где технологические параметры средствами электропривода не регулировались (например, насосные станции и воздуходувки).
Основой для разработки асинхронного двигателя послужило открытие явления вращающегося магнитного поля, сделанное одновременно и независимо друг от друга Феррарисом (Италия) и Н. Теслой (США) и опубликованное в 1888 г.
Вто же самое время русским электротехником М. О. ДоливоДобровольским сконструирован трехфазный асинхронный двигатель с распределенной обмоткой статора, а в 1889 г. им же был изобретен короткозамкнутый ротор асинхронного двигателя с обмоткой в форме беличьей клетки. Конструкция асинхронного двигателя, принципиально разработанная тогда, сохранилась до сих пор, он и поныне является одной из самых дешевых и долговечных электрических машин.
Наиболее широко распространен асинхронный двигатель с
короткозамкнутым ротором. Это объясняется простотой его конструкции и высокой надежностью, связанной с отсутствием щеток и контактных колец.
Длительное время асинхронный двигатель использовался, в основном, в нерегулируемых электроприводах, хотя теоретические способы
3
регулирования его скорости известны давно. Одновременно велись работы по практическому созданию регулируемого привода переменного тока.
Известны способы регулирования скорости асинхронного двигателя:
изменение напряжения на статорной обмотке, переключение числа пар полюсов, введение сопротивления или добавочной электродвижущей силы в роторную цепь двигателя с фазным ротором, изменение частоты напряжения на статоре. Лишь электропривод с регулированием скорости путем изменения частоты напряжения на статоре мог составить конкуренцию приводу постоянного тока с двигателем независимого возбуждения в тех устройствах, в которых требуется большой диапазон регулирования скорости и предъявляются высокие требования к точности ее поддержания и динамическим характеристикам привода.
Наиболее распространенный тип электропривода с двигателем переменного тока включает в себя приводной двигатель и преобразователь частоты со звеном постоянного тока и инвертором с широтно-импульсной модуляцией. Переменное выходное напряжение формируется автономным инвертором из напряжения постоянного тока.
Поскольку обычно в качестве источника питания используется сеть переменного тока, то в состав преобразователя частоты входит управляемый или неуправляемый выпрямитель. Такие преобразователи принципиально не имеют ограничения на максимальное значение выходной частоты. Преобразователи частоты со звеном постоянного тока подразделяются на преобразователи с автономным инвертором тока и автономным инвертором напряжения. Наиболее широко используются преобразователи с автономным инвертором напряжения.
Система управления приводом переменного тока с микропроцессорным управлением и внешним интерфейсом обеспечивает пользователю максимум возможностей для использования привода в самых различных отраслях промышленности.
4

1 Переменный ток
1.1 Основные параметры переменного тока
При подключении к источнику переменного тока с синусоидально изменяющейся ЭДС электрических цепей с линейными сопротивлениями в них будут действовать синусоидально изменяющиеся напряжения, и протекать синусоидально изменяющиеся токи. Переменные токи, ЭДС и напряжения характеризуются четырьмя основными параметрами: периодом, частотой,
амплитудой и действующим значением.
i |
|
2 |
|
|
|
|
|
+Im |
i = Im sin (ωt ) |
I |
|
|
|
−Im |
ωt |
|
1 |
|
|
|
|
T |
|
Рисунок 1.1 - Кривые изменения синусоидального переменного тока при
различной частоте
Период. Промежуток времени T , в течение которого ЭДС e ,
напряжение u или ток i (рис. 1.1) совершают полный цикл изменений, называется периодом. Чем быстрее вращается виток или ротор генератора переменного тока, тем меньше период изменения ЭДС, напряжения или тока.
Частота. Число полных периодов изменения ЭДС, напряжения или тока
за одну секунду называется частотой: |
|
f = 1/ T . |
(1.1) |
Частота измеряется в герцах, т. е. числом периодов в секунду. Чем выше частота, тем меньше период изменения тока, напряжения или ЭДС. Электрические станции переменного тока вырабатывают ток, изменяющийся с частотой 50 Гц, т. е. 50 периодов в секунду. В автоматике и радиотехнике применяют электрические токи и более высоких частот. Такие частоты
измеряются в килогерцах (1 кГц=103 Гц) и мегагерцах (1 МГц=106 Гц).
Из рис. 1.1 следует, что в течение одного периода T фаза ωt тока (ЭДС или напряжения) изменяется на угол 360°, или 2π радиан. Поэтому угловая частота переменного тока определится:
5
ω = 2π / T = 2π f . |
(1.2) |
Амплитуда. Наибольшее значение переменного тока (ЭДС и напряжения) называют амплитудным значением, или амплитудой. В
простейшем генераторе переменного тока ток i дважды достигает амплитудного значения (рис. 1.1): во время первого полуоборота +Im , а во время второго полуоборота −Im . Точно так же за один период ЭДС e два раза достигает амплитудного значения: +Em и −Em.
Действующее значение. Ток, напряжение и ЭДС, действующие в электрической цепи в каждый отдельный момент времени, характеризуются так называемыми мгновенными значениями. Эти значения принято обозначать строчными буквами i , u , e . Однако судить о переменных ЭДС, токе или напряжении по их мгновенным значениям неудобно, так как эти значения непрерывно меняются. Поэтому оценивать способность переменного тока совершать механическую работу или создавать тепло принято по действующему его значению.
Действующее значение переменного тока численно равно такому
постоянному |
току, |
при котором за время равное |
одному периоду T в |
||||||||||||||
проводнике с сопротивлением R выделяется такое же количество тепловой |
|||||||||||||||||
энергии, как и при переменном токе. |
|
|
|
|
|
|
|
|
|
||||||||
Количество энергии, выделяемое в проводнике: |
|
|
|||||||||||||||
∙ при постоянном токе |
|
|
|
|
|
|
|
|
|
|
|
||||||
Q= = I 2RT . |
|
|
|
|
|
|
|
|
|
|
|
(1.3) |
|||||
∙ при переменном токе |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
T |
|
2 |
|
T |
2 |
|
2 |
|
|
2 |
T |
1 − cos 2t |
||||
Q≈ = ∫ i |
|
(t )Rdt = R ∫ Im sin |
|
tdt = |
ImR ∫ |
|
|
|
dt = |
||||||||
|
|
|
|
||||||||||||||
0 |
|
|
|
0 |
|
|
|
|
|
|
0 |
|
2 |
|
|||
2 |
|
T |
|
T |
|
2 |
|
|
|
|
|
|
|
||||
= |
ImR |
|
|
∫ dt |
− ∫ cos 2tdt = |
Im R |
T . |
|
|
|
|
|
(1.4) |
||||
|
|
|
|
|
|
|
|||||||||||
2 |
|
|
|
|
0 |
|
2 |
|
|
|
|
|
|
|
|||
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|||
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где ∫ cos 2tdt = 0 |
- интеграл |
от любой периодической функции за период |
|||||||||||||||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
равен нулю.
Приравняем правые части выражений (1.3) и (1.4):
6

|
2 |
R |
|
|
|||||
I 2 |
RT = |
Im |
T . |
(1.5) |
|||||
|
|
||||||||
|
2 |
|
|
|
|||||
Из (1.5) следует: |
|
||||||||
I = |
Im |
|
. |
|
|
(1.6) |
|||
|
|
|
|
|
|||||
|
|
|
|
|
|
||||
|
2 |
|
|
|
|
|
|
||
Под действующим значением переменного тока понимают силу такого постоянного тока (прямая 2 на рис. 1,1,а), который, проходя по
проводнику в течение некоторого времени (например, в течение одного периода или 1 с), выделит в нем такое же количество тепла (произведет такую же механическую работу), как и данный переменный ток (кривая 1
на рис. 1,1,а). Действующие значения тока, напряжения и ЭДС обозначают
соответственно I , U , E . |
|
||||
При синусоидальном переменном токе |
|
||||
I = Im / |
|
= 0.707Im . |
|
||
2 |
(1.3) |
||||
Аналогично для синусоидальных напряжений и ЭДС |
|
||||
U /Um = E / Em = 1/ |
|
= 0.707 . |
|
||
2 |
(1.4) |
||||
На практике для характеристики параметров переменного тока используют, главным образом, действующие значения тока, напряжения и ЭДС. Например, когда говорят, что напряжение в осветительной сети переменного тока составляет 220 В или, что по цепи проходит ток 100 А, то это значит, что действующее значение напряжения приложенного к данной сети равно 220 В или, что действующее значение тока, проходящего по данной цепи,
равно 100 А. Электрическая энергия и механическая работа, создаваемые переменным током в различных электрических устройствах, пропорциональны действующим значениям тока и напряжения. Большая часть существующих приборов для измерения переменного тока измеряет действующие значения тока, напряжения и ЭДС.
1.2 Элементы электрической цепи синусоидального тока
Индуктивность
Вокруг всякого проводника с током образуется магнитное поле, которое
. .
характеризуется вектором магнитной индукции B и магнитным потоком Ф:
7
. |
. |
|
|
|
|
. |
|
Ф = ∫ B × d S . |
(1.5) |
||||||
|
s |
|
|
||||
Если поле образуют несколько w проводников с одинаковым током, то |
|||||||
используют понятие потокосцепления Ψ : |
|
||||||
Ψ = wФ. |
|
(1.6) |
|||||
Отношение потокосцепления к току, который его создает, называют |
|||||||
индуктивностью катушки: |
|
||||||
L = Ψ . |
|
(1.7) |
|||||
|
i |
|
|
||||
При изменении во времени потокосцепления согласно закону Фарадея |
|||||||
возникает ЭДС самоиндукции: |
|
||||||
e |
= − |
dΨ |
. |
|
(1.8) |
||
|
|
|
|||||
L |
|
dt |
|
|
|||
|
|
|
|
||||
С учетом соотношения (1.7) получаем: |
|
||||||
e |
= −L |
di |
. |
(1.9) |
|||
|
|||||||
L |
|
|
dt |
|
|
||
|
|
|
|
|
|||
Эта ЭДС всегда препятствует изменению тока (закон Ленца). Поэтому, чтобы через проводники все время протекал ток, необходимо к проводникам прикладывать компенсирующее напряжение:
uL = −eL . |
(1.10) |
||||
Сопоставляя уравнения (1.9) и (1.10) получаем: |
|
||||
u |
L |
= L |
di |
. |
(1.11) |
|
|||||
|
|
dt |
|
||
|
|
|
|
||
Это |
соотношение является аналогом закона Ома для |
индуктивности. |
|||
Конструктивно индуктивность выполняется в виде катушки с проводом. Реальная катушка с проводом кроме свойства создавать магнитное поле всегда обладает активным сопротивлением R .
Единицей измерения индуктивности является Генри (Гн). Часто
используют дробные единицы:
∙ |
1 |
–6 |
Гн; |
мкГн = 10 |
|||
∙ |
1 |
–3 |
Гн. |
мГн = 10 |
8
Емкость
Все проводники с электрическим зарядом создают электрическое поле. Характеристикой этого поля является разность потенциалов (напряжение).
Электрическую емкость определяют отношением заряда проводника к приложенному напряжению:
C = |
Q |
. |
(1.12) |
||
|
|
||||
|
Uc |
|
|||
Учитывая, что ток равен изменению заряда во времени |
|
||||
i = |
dQ |
, |
(1.13) |
||
|
|||||
|
dt |
|
|||
получаем формулу связи тока, протекающего по емкости с напряжением,
приложенным к емкости:
i = C |
dUc |
. |
(1.14) |
||
|
|
|
|||
|
|
dt |
|
||
Для удобства ее интегрируют и получают: |
|
||||
Uc = |
1 |
∫ idt . |
(1.15) |
||
|
|||||
|
|
C |
|
||
Это соотношение является аналогом закона Ома для емкости. |
|||||
Конструктивно емкость выполняется в |
виде двух проводников |
||||
разделенных слоем диэлектрика. Форма проводников может быть плоской, трубчатой, шарообразной и др.
Единицей измерения емкости является фарада: 1Ф = 1Кл / 1В = 1Кулон / 1Вольт.
Фарада является большой единицей, например, емкость земного шара равна ≈ 0.7 Ф. Поэтому чаще всего используют дробные значения:
∙ |
1 |
–12 |
Ф, (пФ – пикофарада); |
пФ = 10 |
|||
∙ |
1 |
–9 |
Ф, (нФ – нанофарада); |
нФ = 10 |
|||
∙ |
1 |
–6 |
|
мкФ = 10 |
Ф, (мкФ – микрофарада). |
||
9
2 Методы изображения и расчета синусоидально изменяющихся величин
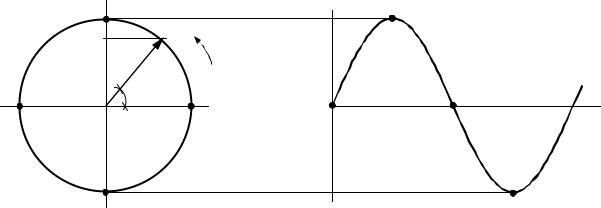
2.1 Векторный метод
При изучении процессов, происходящих в цепях переменного тока, удобно пользоваться методом векторного изображения синусоидально изменяющихся величин.
a) |
2 |
y |
A |
б) |
2 |
|
|
|
B |
|
ω |
i = Im sin (ωt ) |
|
||
|
Im |
|
|
||||
|
|
|
|
|
|||
3 |
|
ωt |
1 |
1 |
|
3 |
|
|
O |
|
x |
0o |
180o |
360o |
ωt |
|
4 |
|
|
|
|
4 |
|
Рисунок 2.1 - Изображение синусоидально изменяющегося тока: а -
вращающимся вектором, б - в виде кривой
Этот метод основан на том, что при вращении некоторого вектора OA
(рис. 2.1, а) с постоянной угловой скоростью ω проекция OB этого вектора на
неподвижную |
вертикальную ось |
y - пропорциональна синусу |
угла |
ωt , |
|
образованного |
вектором |
OA с |
горизонтальной осью x . |
То |
есть |
OB = OAsinωt . Следовательно, |
кривая, выражающая зависимость длины |
||||
проекции OB от угла ωt |
за один оборот вектора OA, будет представлять |
||||
собой синусоиду (рис. 2.1, б). Если в качестве длины (модуля) вектора принять
амплитудное значение переменного тока Im , то полученная кривая будет представлять собой графическое изображение изменения мгновенного значения
тока i от угла |
ωt . При ωt = 0 (точка |
1) вектор OA будет расположен |
||||
горизонтально и |
i = 0 , при ωt = 90o |
(точка 2) вектор OA расположен |
||||
вертикально вверх и i = Im , при ωt = 180o (точка 3) вектор |
OA также |
|||||
расположен |
горизонтально и i = 0 при |
ωt = 270o (точка |
4) |
вектор |
OA |
|
расположен |
вертикально вниз и i = −Im (проекции OB |
вектора |
OA, |
|||
расположенные выше точки 0, будем считать положительными, а
расположенные ниже этой точки — отрицательными). Точкам 1 - 4 на
10