

СКЕ / 3_Асинхронные двигатели. Регулирование скорости
.pdfТаким образом, для того, чтобы наиболее эффективно реализовать принципы частотного управления асинхронным двигателем, необходимо в соответствии с видом нагрузки на валу двигателя управлять напряжением,
подводимым к статору, взаимосвязано с изменением частоты тока статора. Перечисленные законы управления (5.90), (5.92), (5.94) достаточны для большинства механизмов. Однако эти законы справедливы только в первом приближении, когда активным сопротивлением статора R1 можно пренебречь
(рис. 5.43, а).
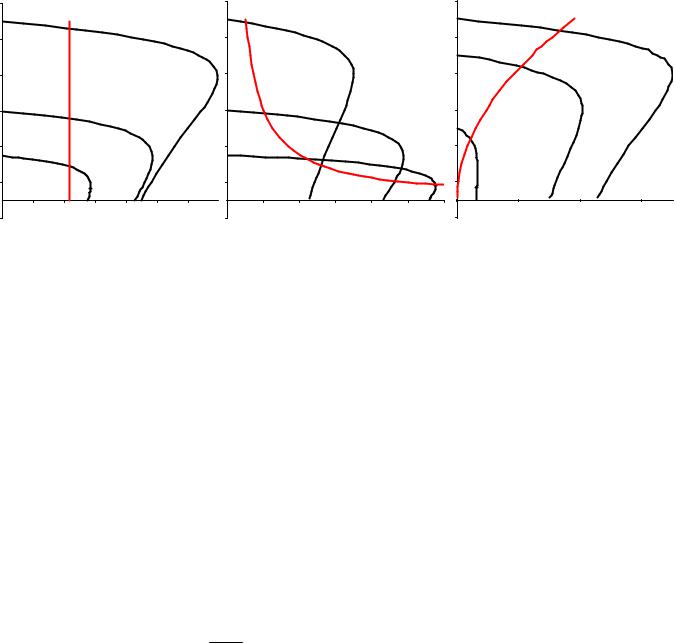
В действительности, при малых значениях частоты максимальный момент существенно снижается при уменьшении частоты из-за возрастающего влияния падения напряжения в активном сопротивлении статора I1R1, что приводит к уменьшению ЭДС E1 и магнитного потока двигателя Фm .
|
а) |
f1н f12 f13 f14 f15 |
б) |
|
|
f1н f12 f13 f14 f15 |
ω |
f |
U / f = const, R = 0 |
ω |
f1н |
|
U / f = const, R ¹ 0 |
|
1н |
1 |
|
|
|
1 |
|
f12 |
|
|
f12 |
|
|
|
f13 |
|
|
f13 |
|
|
|
f14 |
|
|
f14 |
|
|
|
f15 |
|
|
f15 |
|
|
|
|
M |
|
|
|
M |
|
Рисунок 5.43 - Зависимости M = F ( f2 ) |
при регулировании по закону |
||||
U1i / f1i = const для различных значений частоты |
f1i |
|||||
|
С учетом падения напряжения на |
сопротивлении R1, механические |
||||
характеристики примут вид, показанный на рис. 5.43, б. Таким образом, при |
||||||
законе управления U1i = const , предполагающем постоянство критического
f1i
момента, наблюдается его снижение при уменьшении частоты f1i .
119
|
На рис. 5.44 даны механические характеристики электроприводов |
|||||||||||||
|
преобразователь |
частоты |
– |
|
асинхронный |
двигатель |
и |
|
различных |
|||||
|
производственных механизмов. |
|
|
|
|
|
|
|
|
|||||
ω |
M |
c |
= const |
ω |
M |
c |
= kω −1 |
|
ω |
|
M |
c |
= kω 2 |
|
|
|
fн |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
f |
н |
|
|
|
|
fн |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.5 fн |
|
|
|
|
0.5 f |
|
|
|
0.5 fн |
||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
н |
|
|
|
|
|
|
|
0.25 f |
н |
|
|
|
0.25 fн |
0.25 fн |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
M |
|
|
|
M |
Рисунок 5.44 - Механические характеристики электроприводов ПЧ-АД и производственных механизмов
При частотном регулировании скорости асинхронного двигателя необходимо учитывать, что реактивные сопротивления двигателя зависят от частоты питающего напряжения. При снижении частоты f1i активное сопротивление R1 становится соизмеримым с реактивными сопротивлениями машины. Поэтому при расчете электромеханических и механических характеристик асинхронного двигателя нельзя пренебрегать активным сопротивлением статора R1.
Выпускаемые преобразователи частоты зачастую предусматривают возможность изменения соотношения между напряжением и частотой, с целью обеспечения указанных трех законов управления.
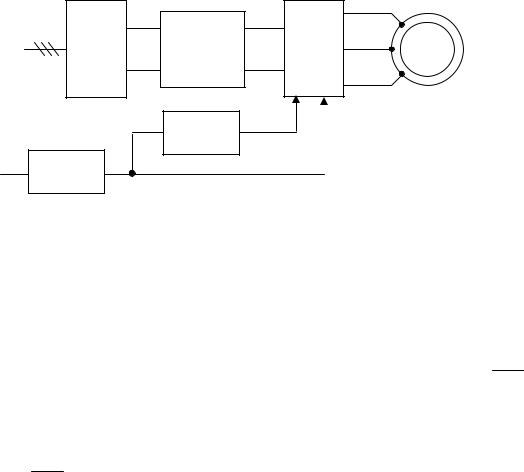
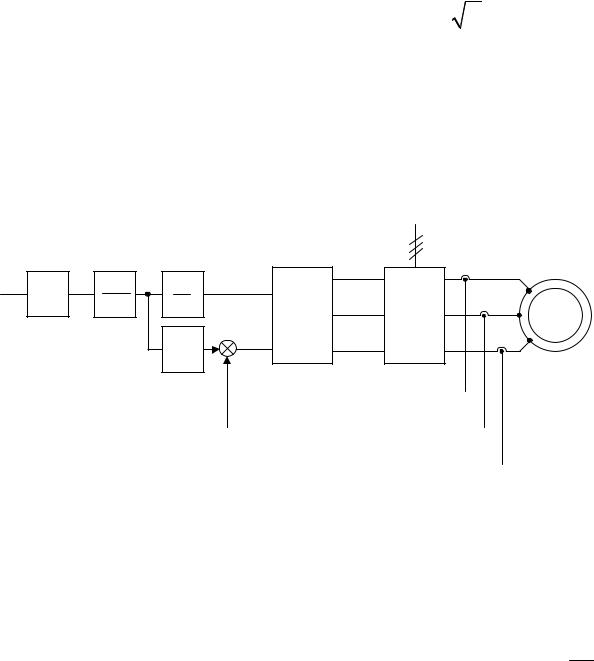
Функциональная схема электропривода, выполненного по системе преобразователь частоты – асинхронный двигатель, реализующая различные
законы управления вида U1i , изображена на рис. 5.45.
f1i
120
M
~ U1
В Фильтр АИН
ФП
U у
ЗИ
Рисунок 5.45 - Функциональная схема скалярного частотного управления скоростью асинхронного двигателя
Выпрямитель В предназначен для выпрямления питающего напряжения.
Входной фильтр служит для уменьшения пульсаций постоянного тока. Сигнал управления U у определяет модуль напряжения статора. Функциональный
преобразователь ФП обеспечивает изменение относительной частоты f1i в
f1н
функции от напряжения управления U у по одному из рассмотренных законов
регулирования U1i . Законы регулирования определяются формулами (5.90),
f1i
(5.92), (5.94).
Задатчик интенсивности ЗИ формирует линейно нарастающий сигнал для обеспечения заданного темпа разгона двигателя. Существенно, что в этом случае (медленное изменение напряжения питания) отсутствуют резкие пики момента двигателя, которые наблюдаются при прямом пуске двигателя.
Недостатками рассмотренного типа привода являются: низкое качество регулирования скорости как при управляющем, так и при возмущающем воздействии; отсутствие режима работы на упор, т.е. при чрезмерных моментах нагрузки привод отключается под действием токовой защиты; сложность реализации управления потокосцеплением в функции момента двигателя.
Для реализации более сложных законов управления используются замкнутые системы регулирования с различными обратными связями.
121
5.9.3.Скалярное управление
5.9.3.1.Частотное управление со скалярной IR -компенсацией
Как было показано, в классе законов U1i = const невозможно получить
f1i
удовлетворительные механические характеристики в широком диапазоне изменения скоростей и нагрузок. Основная причина - возрастание влияния активного сопротивления обмотки статора при снижении частоты питающего напряжения.
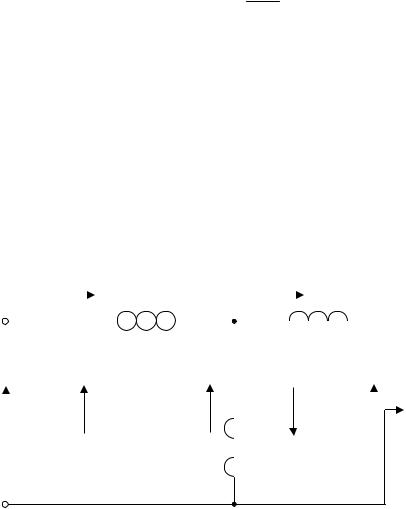
В электроприводах по системе АИН-АД со скалярным управлением существуют и другие законы регулирования. Рассмотрим Т-образную схему замещения, показную на рис. 5.46.
|
|
. |
|
|
|
|
. |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
' |
|
|
|
|
|
|
||||||
|
|
I1 |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
− I2 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
' |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
R1 |
|
|
|
|
X1 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
Rm |
X 2 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
. |
. |
|
|
. |
|
|
|
. . |
|
' |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
U1 |
|
E1 |
Em |
|
|
|
|
|
I o E |
|
|
|
||||||
|
|
|
|
|
|
2 |
|
|
|
|||||||||
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
 X m
X m
Рисунок 5.46 – Т-образная схема замещения АД в установившемся режиме при частотном управлении
В соответствии со схемой замещения (рис. 5.46) можно записать уравнения равновесия напряжений:
. |
|
. |
. |
|
|
|
|
|
|
|
(5.95) |
U1 = E1+ R1 I1, |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
||||
. |
|
. |
|
|
. |
|
|
|
|
(5.96) |
|
U1 = Em + ( R1 + jX1) I1, |
|
|
|
||||||||
|
|
|
|
||||||||
. |
|
. |
+ (R + jX |
|
. |
|
+ jX |
|
. |
' . |
|
U |
1 |
= E ' |
1 |
) I |
1 |
' |
I |
(5.97) |
|||
|
2 |
1 |
|
|
2 |
|
2 |
|
|||
Исходя из уравнений (5.95) – (5.97) |
можно получить следующие законы |
||||||||||
регулирования скорости:
122
|
1. |
E1 = const - регулирование с постоянным потокосцеплением статора |
|||||||||||
|
|
f1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Ψ1, |
|
|
|
|
|
|
|
|
|
|
|
|
2. |
Em = const |
- |
регулирование с |
постоянным потокосцеплением в |
||||||||
|
|
f1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
воздушном зазоре Ψm , |
|
|
|
|
|
|
|||||
|
3. |
E' |
|
|
|
|
|
|
|
|
|
|
|
|
2 = const - регулирование с постоянным потокосцеплением ротора |
||||||||||||
|
|
f1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Ψ2, |
|
|
|
|
|
|
|
|
|
|
|
|
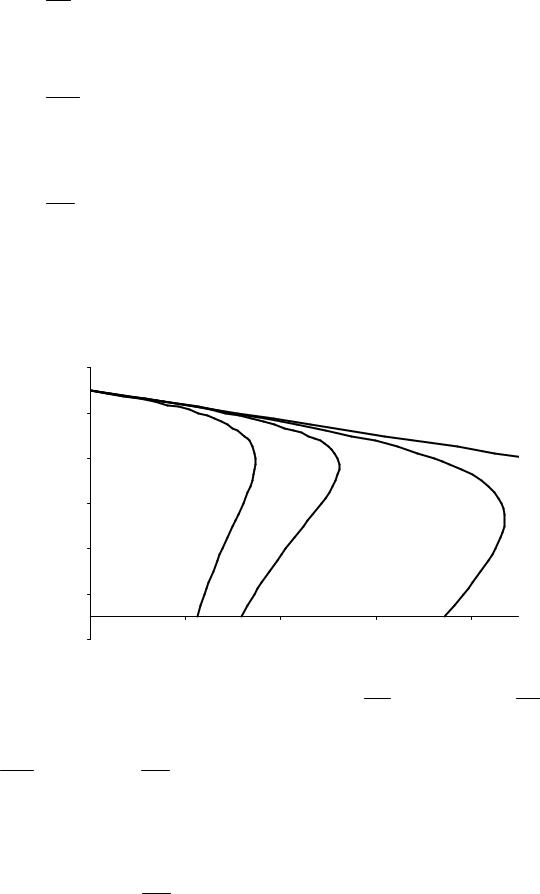
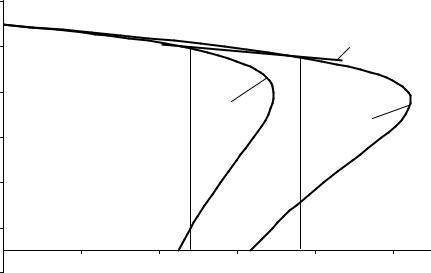
Если при изменении момента статической нагрузки поддерживать |
||||||||||||
постоянство потокосцеплений Ψ1, Ψm , Ψ2, то механические характеристики |
|||||||||||||
асинхронного двигателя примут вид, приведенный на рис. 5.47. |
|
|
|
||||||||||
|
|
ω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
M |
|
|
|
Рисунок 5.47 - Механические характеристики асинхронного двигателя |
||||||||||||
при |
различных |
законах |
управления: |
1 - |
U1 = const , |
2 - |
E1 = const , |
||||||
|
|
|
|
|
|
|
|
|
f1 |
|
|
f1 |
|
3 - |
E |
|
|
E' |
|
|
|
|
|
|
|
|
|
m |
= const , 4 - |
2 = const |
|
|
|
|
|
|
|||||
|
f1 |
|
|
|
f1 |
|
|
|
|
|
|
|
|
|
Анализ механических характеристик (рис. 5.47) показывает, что для |
||||||||||||
стабилизации |
скорости |
при |
изменении |
нагрузки |
предпочтителен |
закон |
|||||||
|
|
|
|
E' |
|
|
|
|
|
|
|
|
|
регулирования при |
|
2 = const . Однако, |
такое регулирование предполагает |
||||||||||
|
|
|
|
|
f1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
123 |
|
|
|
|
|
|
значительное повышение питающего напряжения, что приводит к насыщению магнитной цепи и перегреву асинхронного двигателя.
На практике наибольшее распространение получили следующие способы
частотного регулирования |
E1 |
= const , |
E1 |
= const , |
E1 |
|
= const . При |
|
|
2 |
|
|
|
||||
|
f1 |
|
|
f 1 |
||||
|
f1 |
|
|
|||||
регулировании скорости в этом классе законов необходимо повышать фазное напряжение только на величину падения напряжения на активном сопротивлении обмотки статора. Такой способ регулирования получил название - частотное управление со скалярной IR -компенсацией.
Структурная схема системы управления со скалярной приведена на рис. 5.48.
U з ωз
1
ЗИ 2π
f з |
|
|
~ U1 |
|
θ |
U уА |
M |
||
1 |
U уB |
|
||
|
|
|||
p |
ПК |
АИН |
||
|
||||
|
U уC |
|||
ФП |
Uр Uу |
|
||
|
|
|
|
Uir |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
||||
|
|
|
iA |
|||||||
|
|
|
Kir R1 |
|
I1 |
ФПТ |
||||
|
|
|
Tir p + 1 |
|
|
|
|
|||
|
|
|
|
iB |
||||||
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
iC |
|||
|
|
|
|
|
|
|
||||
Рисунок 5.48 - Структурная схема частотного управления со скалярной |
||||||||||
IR -компенсацией
Задатчик интенсивности ЗИ формирует кривую разгона двигателя.
Сигналу задания U з соответствует задание на частоту fз. Функциональный преобразователь ФП формирует требуемую зависимость между частотой и
напряжением преобразователя, устанавливая один из законов управления E1 .
f1
При скалярной IR -компенсации сигнал управления U y является суммой
сигнала регулирования U p и сигнала положительной обратной связи по току
Uir :
U y = U p + Uir = U p + Kir R1I1. |
(5.98) |
124
где Kir - коэффициент положительной обратной связи по току; R1 - активное
сопротивление обмоток статора; I1 - сигнал, пропорциональный действующим
значениям токов iA , iB , iC обмоток статора двигателя.
Сигнал управления U y является входным для прямого координатного
преобразователя |
ПК , на выходе которого формируются три синусоидальных |
|||||
напряжения управления |
U yA , U yB , U yC , сдвинутые друг |
относительно |
||||
друга на угол |
± |
2π |
, |
с |
амплитудами, пропорциональными |
напряжению |
|
||||||
|
3 |
|
|
|
|
|
управления. Сигналы U yA , |
U yB , U yC формируют фазные напряжения на |
|||||
выходе автономного инвертора напряжения АИН .
Для пояснения принципа действия АИН-АД с положительной обратной связью по току рассмотрим механические характеристики асинхронного двигателя, изображенные на рис. 5.49.
ω |
|
|
|
|
|
|
3 |
|
|
1 |
2 |
|
|
|
|
0 |
Mс1 |
Mс2 |
M |
Рисунок 5.49 – Механические характеристики электропривода АИН-АД при наличии положительной обратной связи по току
Предположим, что асинхронный двигатель работал на характеристике 1 (рис. 5.49) с моментом на валу, равным Mc1. При увеличения момента на валу до значения Mc2 , возрастут токи фаз iA , iB , iC и, следовательно, сигнал I
функционального преобразователя тока статора ФПТ . Увеличится и напряжение положительной обратной связи, вычисляемое по току I с
помощью апериодического звена:
125
W ( p) = |
Kir R1 |
. |
(5.99) |
|
|||
т |
Tir p +1 |
||
|
|
||
где Tir - постоянная времени задержки контура тока, с.
С ростом корректирующего сигнала Uir возрастет и сигнал управления
Uy , что приведет к росту напряжения на зажимах статора и, в конечном счете,
кувеличению критического момента M к ≡ U12 . Характеристика 2 (рис. 5.49)
соответствует возросшему фазному напряжению. В результате действия положительной обратной связи формируется механическая характеристика замкнутой системы 3 (рис. 5.49), жесткость которой определяется коэффициентом Kir .
Для получения токового сигнала, как правило, используются шунты, включенные в цепь переменного тока инвертора напряжения (рис. 5.48).
При скалярной IR -компенсации меняется только модуль напряжения обмотки статора асинхронного двигателя без изменения фазового угла. Это
. .
приводит к непостоянству векторов ЭДС Е1 и потокосцепления Ψ1. Как следствие в системе регулирования могут возникнуть возмущения, связанные с
изменением фазового угла Несмотря на этот недостаток, разомкнутые структуры частотного
регулирования скорости на основе АИН со скалярной IR -компенсацией находят широкое применение в приводах длительного режима работы с диапазоном регулирования
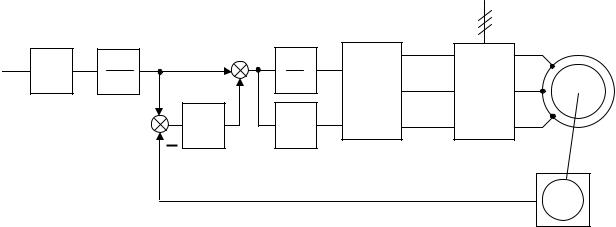
5.9.3.2. Система преобразователь частоты – асинхронный двигатель с отрицательной обратной связью по скорости
Функциональная схема системы АИН-АД с отрицательной обратной связью по скорости приведена на рис. 5.50
126
U з ωз |
|
|
|
θ |
|
~ U1 |
f з |
f зчи |
1 |
U уА |
M |
||
ЗИ |
1 |
|
|
U уB |
|
|
2π |
|
p |
ПК |
АИН |
||
|
|
|
|
U уC |
||
|
|
PC |
ФП |
|
|
|
|
|
|
|
|
||
|
|
fкор |
|
U |
|
|
|
|
fос |
|
у |
|
|
|
|
|
|
|
BR |
|
|
|
|
|
|
|
Рисунок 5.50 - Система АИН-АД с отрицательной обратной связью по скорости
В системе регулирования (рис. 5.50) питание асинхронного двигателя осуществляется от инвертора напряжения АИН . Управляющим воздействием является частота fз. Задание на напряжение формируется функциональным преобразователем ФП . Его передаточная функция зависит от выбранного закона регулирования напряжения в функции частоты.
Характер изменения скорости определяется параметрами задатчика интенсивности ЗИ .
Система регулирования (рис. 5.50) относится к классу систем с полузамкнутым управлением. Сигнал задания частоты складывается из двух сигналов: собственно сигнала задания частоты fз и корректирующего сигнала , являющегося выходом регулятора скорости.
В быстро протекающих процессах действует сигнал управления заданной частоты fз, что соответствует разомкнутому управлению. В медленных процессах действует обратная связь по угловой скорости, что соответствует замкнутому управлению.
Сигнал корректирующей частоты определяется по выражению:
fкор = Wpc ( p) ( fз − fос ). |
(5.100) |
На рис. 5.51 приведены механические характеристики, поясняющие работу электропривода.
127

ω |
|
|
|
ω1 |
|
|
3 |
ω2 |
|
|
2 |
|
|
1 |
|
0 |
M с1 |
M с2 |
M |
Рисунок 5.51 – Механические характеристики электропривода АИН-АД при наличии отрицательной обратной связи по скорости
Предположим, что двигатель работал на характеристике 1 (рис. 5.51) с
сигналом задания частоты инвертора fзчи1 и моментом нагрузки Мс1, что соответствует скорости электропривода ω1. Допустим, что нагрузка на валу двигателя возросла и стала равной Мс2 .
Так как момент двигателя М стал меньше момента нагрузки Мс2 ,
скорость вращения двигателя начнет падать. Это приведет к тому, что сигнал отрицательной обратной связи по скорости fос начнет уменьшаться.
Корректирующий сигнал fкор будет увеличиваться и, следовательно,
возрастет сигнал задания частоты инвертора fзчи = fз + fкор. Асинхронный двигатель переходит на механическую характеристику 2 (рис. 5.51),
соответствующую новому сигналу задания частоты инвертора fзчи2. Новая точка установившейся работы электропривода соответствует скорости ω2.
Результирующая характеристика замкнутой системы 3 (рис. 5.51) получается более жесткой, чем в случае скалярной IR -компенсации.
Произведем математический анализ и синтез регулятора скорости, упростив для этого структурную схему асинхронного двигателя.
128