

СКЕ / 3_Асинхронные двигатели. Регулирование скорости
.pdf5.9.3.3. Структурная схема асинхронного двигателя при управлении по цепи обмотки статора изменением частоты
Структурную схему асинхронного двигателя при управлении изменением частоты найдем из условия, что двигатель в процессе регулирования работает на линейном участке механической характеристики с малыми скольжениями
0 ≤ s ≤ sк, при постоянном потоке статора.
Формулу Клосса (5.75) для этого случая можно упростить, пренебрегая
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
при малых скольжения членом |
|
|
в знаменателе. |
||||||||||
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
sк |
|
M = |
|
2M к |
≈ |
2M кs |
. |
|
|
||||||
|
|
|
|
|
|
||||||||
|
|
s |
+ |
|
sк |
|
|
|
sк |
|
|
||
|
|
sк |
|
s |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|||
Подставив в (5.101) выражение для скольжения |
|||||||||||||
M = |
|
2M к |
(ω |
o |
− ω ). |
|
|
||||||
|
|
|
|
||||||||||
|
ωosк |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
||||||
(5.101)
s = ωo − ω , получим:
ωo
(5.102)
При малых скольжениях ток ротора можно приближенно считать активным, поэтому момент асинхронного двигателя при этих скольжениях пропорционален току. При увеличении нагрузки на валу двигателя возрастают ЭДС и ток ротора. Однако, из-за значительной индуктивности обмоток двигателя, изменение тока во времени происходит примерно по экспоненциальному закону с постоянной времени:
|
L |
+ L' |
|
|
T = |
1 |
2 |
, |
(5.103) |
|
+ R' |
|||
э |
R |
|
|
|
|
1 |
2 |
|
|
|
' |
|
' |
|
|
|
X1 + X 2 |
|
|
где L + L |
= |
|
. |
|
|
||||
1 |
2 |
|
2π f1н |
|
|
|
|
|
|
Выражение для момента двигателя (5.102) с учетом (5.103) примет вид: |
||||
M = |
2M к |
(ωo − ω ). |
(5.104) |
|
ωosк (Тэр + 1) |
||||
|
|
|
129
Механическая часть электропривода в случае представления ее в виде одномассовой системы описывается уравнением:
M − M c = Jpω . |
(5.105) |
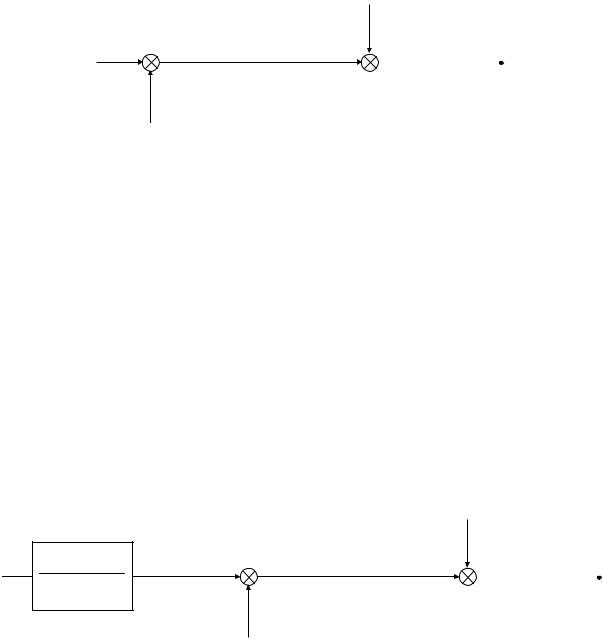
В соответствии с уравнениями (5.104) и (5-105) можно составить упрощенную структурную схему асинхронного двигателя, работающего на линейном участке механической характеристики, при постоянном магнитном потоке, созданном обмотками статора.
ωo |
|
|
|
|
|
M |
M c |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
ω |
|||
|
|
|
2M к |
|
|
|
|
|
|
1 |
|
||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
ωosк (Тэр + 1) |
|
|
|
|
|
|
Jp |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 5.52 - Упрощенная структурная схема асинхронного двигателя при управлении изменением частоты напряжения статора
Инвертор напряжения может быть представлен апериодическим звеном:
W |
( p ) = |
Кин |
|
, |
|
|
|
(5.106) |
|
|
|
|
|
||||||
ин |
|
Тин р + 1 |
|
|
|
|
|||
|
|
|
|
|
|
|
|||
где Кин |
- коэффициент |
передачи |
инвертора; Тин = |
1 |
- |
постоянная |
|||
|
|||||||||
fнч |
|||||||||
|
|
|
|
|
|
|
|
||
времени запаздывания автономного |
инвертора напряжения; |
fнч |
- несущая |
||||||
частота инвертора.
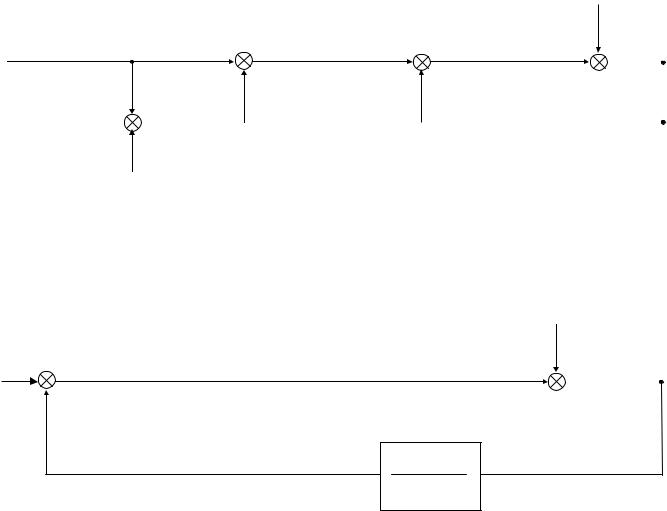
С учетом структурной схемы асинхронного двигателя (рис. 5.52) и передаточной функции инвертора (5.106) можно составить структурную схему скалярного частотного управления скоростью асинхронного двигателя
(рис. 5.53).
U у
Кин Тин р +1
f1 |
|
|
|
ωo |
|
|
|
|
|
|
|
|
M |
M c |
ω |
|||||||
|
|
2π |
|
|
|
|
|
|
2M к |
|
|
|
|
|
1 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
z p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
ω s |
(Т |
э |
р + 1) |
|
|
|
|
|
|
Jp |
|
|
||||
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
o к |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 5.53 – Структурная схема системы АИН-АД при скалярном
частотном регулировании скорости
130
На схеме рис. 5.53 введено новое обозначение числа пар полюсов z p = p взамен ранее принятого обозначения p . Это сделано для исключения
двоякого толкования передаточных функций на структурных схемах, для которых p - оператор преобразования Лапласа.
5.9.3.4. Синтез параметров регулятора скорости при скалярном частотном регулировании скорости
Линеаризованная структурная схема электропривода АИН-АД с отрицательной обратной связью по скорости, соответствующая функциональной схеме рис. 5.50, изображена на рис. 5.54.
U з ωз fз |
|
|
|
|
|
|
|
|
f1 |
|
|
ωo |
|
M |
|
M c ω |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2π |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
ЗИ |
|
|
z p |
|
|
|
|
|
|
|
|
|
Кин |
|
|
|
|
|
|
2M к |
|
|
|
|
|
1 |
|
|
|
||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тин р + 1 |
|
|
|
|
|
|
|
|
|
|
|
ωosк (Тэр + 1) |
|
|
|
|
|
|
|
|
|
|||||
|
2π |
|
|
|
|
|
|
|
|
|
|
|
|
|
z p |
|
|
|
|
|
|
|
|
|
|
Jp |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
Wpc ( p) |
|
|
fкор |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
fос |
|
|
|
|
|
|
|
|
|
|
|
|
Кс |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тдс р +1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Рисунок 5.54 - Линеаризованная структурная схема электропривода АИНАД с отрицательной обратной связью по скорости
Синтез регулятора скорости произведем, пренебрегая внутренней связью по скорости. Расчетная структурная схема примет вид, показанный на рис. 5.55.
U зc |
|
|
|
|
|
f1 |
|||||
|
|
|
Кин |
|
|
|
2π |
|
|||
|
|
|
Wpc ( p) |
|
|
|
|
||||
|
|
|
|
|
Тин р + 1 |
|
|
z p |
|||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
Uосс
ωo |
M M c |
ω |
|||||||||
|
|
2M к |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
||||
|
|
ωosк (Тэр + 1) |
|
|
|
|
|
|
Jp |
|
|
Кс Тдс р +1
Рисунок 5.55 - Расчетная структурная схема системы АИН-АД с отрицательной обратной связью по скорости
Передаточная функция объекта регулирования контура скорости:
131

W |
( p ) = |
Кин |
× |
2π |
× |
2M к |
× |
1 |
× |
Кc |
. |
|
|
|
ωosк (Тэр + 1) |
|
|
(5.107) |
|||||||
o |
|
Тин р +1 z p |
|
Jp Тдс р + 1 |
||||||||
|
|
|
|
|||||||||
Пренебрегая произведением постоянных времени, получим:
Wo ( p ) = |
4π КинКcM к |
, |
(5.108) |
||
Jz pωosк p (Тс р + 1) |
|||||
|
|
|
|||
где Тс = Тин + Тэ + Тдс |
- суммарная малая постоянная |
времени контура |
|||
скорости.
Передаточную функцию регулятора скорости, при условии его настройки на модульный оптимум, определим из формулы:
W pc ( p )Wo ( p ) = |
1 |
. |
|
acTc p (Тс р + 1) |
|||
|
|
Подставим взамен Wo ( p ) его выражение из формулы (5.108):
W pc ( p) |
4π Кин |
КcM к |
= |
1 |
. |
|||||
Jz pωosк p (Тс р + 1) |
acTc p (Тс р +1) |
|||||||||
|
|
|
|
|||||||
Wpc ( p) |
= K pc = |
|
Jz pωosк |
|
. |
|
||||
|
|
|
|
|
|
|||||
|
|
|
4acTcπ КинКcM к |
|
||||||
При aс = 2 получим: |
|
|
|
|
||||||
K pc = |
|
Jz pωosк |
|
. |
|
|
|
|
||
|
|
|
|
|
|
|
|
|||
|
8Tcπ КинКcM к |
|
|
|
|
|||||
(5.109)
(5.110)
(5.111)
Таким образом, при настройке контура скорости на модульный оптимум,
регулятор скорости будет пропорционального типа с коэффициентом усиления
Kpc .
Втех случаях, когда электропривод с П-регулятором не обеспечивает требуемые показатели статической точности, контур скорости следует настраивать на симметричный оптимум. В этом случае передаточная функция регулятора определится из уравнения:
Wpc ( p)Wo ( p) = |
|
4Тс p + 1 |
. |
||||
8T |
2 p2 |
(Т |
с |
р +1) |
|||
|
|
||||||
|
c |
|
|
|
|||
Подставим взамен Wo ( p) |
его выражение из формулы (5.108): |
||||||
132
Wpc ( p) |
|
4π КинКcM к |
|
|
= |
|
4Тс p + 1 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
||
Jz pωosк p (Тс р +1) |
|
|
|
2 |
|
|
|
|
|||||||
|
2 |
p |
(Тс |
р + 1) |
|
||||||||||
|
|
8Tc |
|
|
|||||||||||
Wpc ( p) = |
Jz pωosк |
× |
4Тс p + 1 |
= K pc |
|
4Тс p + 1 |
. |
(5.112) |
|||||||
8Тсπ КинКcM к |
|
|
|||||||||||||
|
|
|
|
4Тс |
|
|
|
|
|
4Тс |
|
||||
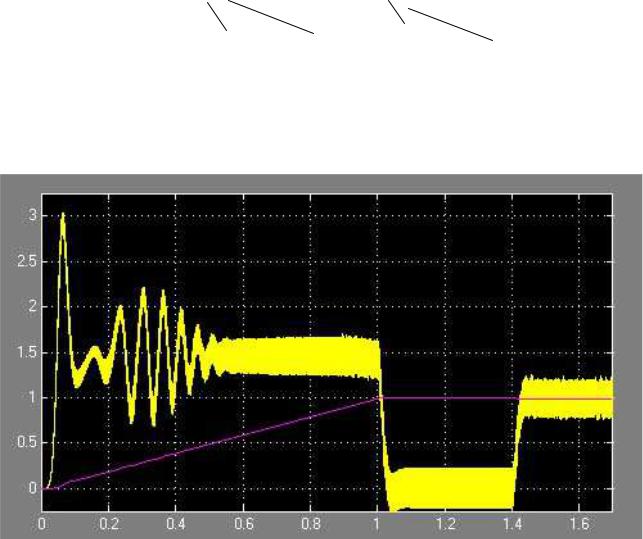
На рис. 5.56 показаны кривые изменения частоты вращения и электромагнитного момента при пуске двигателя.
Рисунок 5.56 - Кривые изменения частоты вращения и электромагнитного момента двигателя при пуске без нагрузки
Как следует из графиков (рис. 5.56), электропривод обеспечивает изменение скорости по линейному закону до достижения заданного значения скорости.
На рис. 5.57 показаны кривые изменения частоты вращения при набросе момента нагрузки, равного номинальному моменту двигателя для трех случаев:
∙АИН-АД, разомкнутая система регулирования;
∙АИН-АД, замкнутая система скалярного частотного регулирования скорости с отрицательной обратной связью по скорости (П-регулятор скорости).
∙АИН-АД, замкнутая система скалярного частотного регулирования скорости с отрицательной обратной связью по скорости (ПИ-регулятор скорости).
133
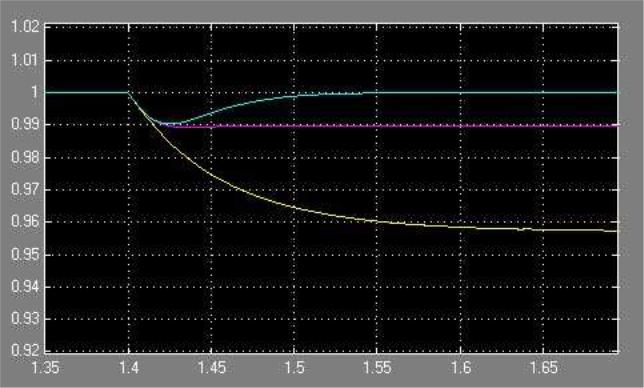
Рисунок 5.57 - Кривые изменения частоты вращения при набросе момента нагрузки, равного номинальному моменту двигателя
Анализ кривых показывает, что наибольшая ошибка наблюдается в разомкнутой системе регулирования скорости и составляет 4.4%, в замкнутой САР скорости с П-регулятором она уменьшается до 1.1%, замкнутая САР скорости с ПИ-регулятором астатична по возмущению.
134
Литература
1. Башарин А.В. Управление электроприводами: учеб. пособие для студ.
вузов /А.В. Башарин, В.А. Новиков, Г.Г. Соколовский, Л.: Энергоатомиздат, Ленингр. отд-ние, 1982.-392 с.
2. Браславский И.Я. Энергосберегающий асинхронный электропривод: учеб. пособие для студ. вузов /И.Я. Браславский, 3.Ш. Ишматов, В, Н. Поляков;
под ред. И.Я. Браславского. М,: Издательский центр «Академия», 2004.-256 с. 3. Вешеневский С.Н. Характеристики двигателей в электроприводе
/С.Н. Вешеневский, М.: Энергия, 1966.-400 с.
4. Зворыкин В.Б. Системы управления электроприводами. Модуль 2:
Системы подчиненного управления. Учеб. пособие. - Днепропетровск:
НМетАУ, 2008.-68 с.
5.Ключев В. И. Теория электропривода: учебник для вузов. 3-e изд. перераб. и доп. М,: Энергоатомиздат, 2001.-714 с.
6.Поздеев А.Д Электромагнитные и электромеханические процессы в частотно-регулируемых асинхронных электроприводах /А.Д. Поздеев.
Чебоксары: Изд-во Чуваш. ун-та, 1998.-172 с.
7. Сабинин Ю.А. Частотно-регулируемые асинхронные электроприводы
/Ю.А Сабинин, В.Л. Грузов. Л.: Энергоатомиздат, Ленинг. отд-ние, 1985.-128 с.
8.Системы подчиненного регулирования электроприводов переменного тока с вентильными преобразователями /О.В. Слежановский, Л.Х. Дацковский, И.С. Кузнецов, Е.Д. Лебедев и др. М,: Энергоатомиздат, 1983.-256 с.
9.Соколовский Г.Г. Электроприводы переменного тока с частотным управлением. /Г.Г. Соколовский. - М,: Издательский центр «Академия», 2006.- 264 с.
10.Чернышев А.Ю. Электропривод переменного тока: учебное пособие
/А.Ю. Чернышев, Ю.Н. Дементьев, И.А. Чернышев. – Томск: Изд-во Томского политехнического университета, 2011.-213 с.
11. Цифровые электроприводы с транзисторными преобразователями /С.Г. Герман-Галкин, В.Д. Лебедев, Б.А. Марков, Н.Г.Чичерин. Л.:
Энергоатомиздат, Ленингр. отд-ние, 1986.-248 с.
12.Шрейнер Р. Т. Математическое моделирование электроприводов переменного тока с полупроводниковыми преобразователями частоты /Р.Т. Шрейнер. Екатеринбург: УРО РАН, 2000.-654 с.
13.Шубенко В.А. Тиристорный асинхронный электропривод с фазовым управлением / В.А. Шубенко, И.Я. Браславский. М,: Энергия, 1972.-200 с.
135
|
|
Содержание |
|
|
|
|
|
|
|
|
|
|
Стр. |
|
Введение |
|
|
|
|
3 |
1 |
Переменный ток |
|
|
|
|
5 |
1.1 |
Основные параметры переменного тока |
|
5 |
|||
1.2 |
Элементы электрической цепи синусоидального тока |
|
7 |
|||
2 |
Методы изображения и расчета синусоидально изменяющихся |
10 |
||||
|
величин |
|
|
|
|
|
2.1 |
Векторные диаграммы |
|
|
|
10 |
|
2.2 |
Символический метод |
|
|
|
15 |
|
2.3 |
Расчет RLC цепи |
|
|
|
|
20 |
3 |
Трехфазный переменный ток |
|
|
|
24 |
|
4 |
Трансформатор |
|
|
|
|
26 |
4.1 |
Электромагнитная схема и принцип действия трансформатора |
26 |
||||
4.2 |
Идеализированный трансформатор |
|
|
28 |
||
4.2.1 |
Холостой ход |
|
|
|
|
29 |
4.2.2 |
Работа под нагрузкой |
|
|
|
31 |
|
4.3 |
Намагничивающий ток и ток холостого хода |
|
33 |
|||
4.3.1 |
Намагничивающий ток |
|
|
|
33 |
|
4.3.2 |
Ток холостого хода |
|
|
|
36 |
|
4.4 |
Комплексные |
уравнения |
и |
векторные |
диаграммы |
37 |
|
трансформатора |
|
|
|
|
|
4.4.1 |
Комплексные уравнения |
|
|
|
37 |
|
4.4.2 |
Векторные диаграммы |
|
|
|
39 |
|
4.5 |
Схема замещения трансформатора |
|
|
42 |
||
4.6 |
Трехфазный трансформатор |
|
|
|
45 |
|
5 |
Асинхронные машины |
|
|
|
49 |
|
5.1 |
Назначение и принцип действия асинхронных машин |
|
49 |
|||
5.1.1 |
Вращающееся магнитное поле |
|
|
|
49 |
|
5.1.1.1 |
Двухполюсное магнитное поле |
|
|
|
49 |
|
5.1.1.2 |
Многополюсное магнитное поле |
|
|
|
52 |
|
5.1.2 |
Принцип действия асинхронного двигателя |
|
52 |
|||
5.2 |
Устройство трехфазных асинхронных двигателей |
|
56 |
|||
5.2.1 |
Двигатели с короткозамкнутым ротором |
|
56 |
|||
5.2.2 |
Двигатели с фазным ротором |
|
|
|
58 |
|
5.2.3 |
Области применения двигателей различных типов |
|
59 |
|||
136
5.3 |
Асинхронная машина при заторможенном роторе |
60 |
5.3.1 |
Холостой ход |
60 |
5.3.2 |
Работа под нагрузкой |
62 |
5.3.3 |
Схема замещения |
64 |
5.4 |
Асинхронная машина при вращающемся роторе |
66 |
5.4.1 |
Электродвижущая сила |
66 |
5.4.2 |
Энергетическая диаграмма |
67 |
5.4.3 |
Связь между скольжением и коэффициентом полезного действия |
69 |
5.4.4 |
Электромагнитный момент |
70 |
5.5 |
Схемы замещения асинхронной машины |
72 |
5.5.1 |
Т-образная схема замещения |
74 |
5.5.2 |
Г-образная схема замещения |
76 |
5.6 |
Механические характеристики асинхронного двигателя |
81 |
5.6.1 |
Двигательный режим работы |
81 |
5.6.2 |
Тормозные режимы работы |
89 |
5.6.2.1 |
Торможение противовключением |
89 |
5.6.2.2 |
Генераторное торможение |
90 |
5.6.2.3 |
Динамическое торможение |
91 |
5.7 |
Устойчивость работы асинхронного двигателя |
93 |
5.7.1 |
Факторы, определяющие устойчивость |
93 |
5.7.2 |
Устойчивость «в малом» |
94 |
5.7.3 |
Устойчивость «в большом» |
96 |
5.8 |
Регулирование скорости асинхронных двигателей |
99 |
5.8.1 |
Фазовое регулирование скорости |
99 |
5.8.2 |
Особенности прямого пуска асинхронных двигателей |
102 |
5.8.3Тиристорные пусковые устройства в электроприводах с 103 асинхронными двигателями
5.8.4 |
Изменение числа полюсов |
105 |
5.8.5 |
Изменение направления вращения |
107 |
5.9Регулирование скорости асинхронных двигателей изменением 108 частоты питающего напряжения
5.9.1Преобразователи частоты для электроприводов переменного 108 тока
5.9.1.1 Преобразователи частоты с непосредственной связью |
109 |
|
5.9.1.2 |
Автономные инверторы тока |
111 |
5.9.1.3 |
Автономные инверторы напряжения |
114 |
137
5.9.2 |
Принципы частотного регулирования |
116 |
5.9.3 |
Скалярное управление |
122 |
5.9.3.1 |
Частотное управление со скалярной IR -компенсацией |
122 |
5.9.3.2Система преобразователь частоты – асинхронный двигатель с 126 отрицательной обратной связью по скорости
5.9.3.3Структурная схема асинхронного двигателя при управлении по 129 цепи обмотки статора изменением частоты
5.9.3.4Синтез параметров регулятора скорости при скалярном 131 частотном регулировании скорости
Литература |
135 |
138