

1.2.1. Класифікація автоматизованих систем (за видом процесу)
Різноманітність автоматизованих систем управління може бути класифікованою за видом процесу управління (рис. 1.4).
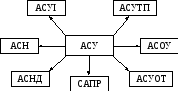 Рис.
1.4.
Рис.
1.4.
АСУТП – автоматизовані системи управління технологічними процесами
АСОУ – автоматизовані системи організаційного управління
АСУОТ – автоматизовані системи управління організаційно-технологічні
САПР – системи автоматизованого проектування
АСНД – науково-дослідні автоматизовані системи
АСН – навчальні автоматизовані системи
АСУІ – автоматизовані системи управління інформацією
1.2.2. Узагальнена модель комп’ютерного управління процесом
Фізичним процесом називаємо послідовну зміну станів об’єктів фізичного світу.
Німецький стандарт DIN дає більш точне визначення фізичного процесу: “комбінація зв’язаних подій в системі, в результаті яких змінюється, переміщується чи запасається енергія, матерія чи інформація”.
Технічний процес визначається як процес, фізичні змінні якого можна виміряти і змінити технічними засобами.
Різниця між фізичним і технічним процесом в тому, що фізичний процес необов’язково повинен керуватись зовні. Технічний процес включає обробку інформації для досягнення заданої цільової функції (мети).
Інформація – найважливіший компонент управління процесами, оскільки вона дозволяє краще використовувати дві інші складові процесу: матерію і енергію.
Узагальнена модель комп’ютерного управління процесами зображена на рис. 1.5.
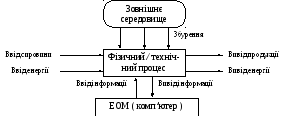
Рис. 1.5.
1.2.3. Об’єкти і процеси управління. Додатний і від’ємний зворотні зв’язки
В теорії управління структура, зображена на рис. 1.6 є елементарною (фундаментальною) ланкою.
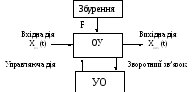
Рис. 1.6.
Частина систем, в яких здійснюється фізичний чи технічний процес, називається об’єктом управління (ОУ), а коло зворотнього зв’язку (ЕОМ, комп’ютер) називається управляючим органом (УО).
Для простоти будемо розглядати об’єкти управління (ОУ), які характеризуються однією змінною Xвх, однією змінною Хвих та локалізованою збурюючою дією F.
Зворотний зв’язок передбачає управління за замкненим циклом.
1.2.4. Властивості процесів, котрі ускладнюють управління
Рівень складності системи управління визначається в першу чергу, властивостями керованого процесу.
Серед багатьох характерних особливостей процесів, котрі ускладнюють управління, найбільше впливають:
нелінійність процесу;
змінне зовнішнє середовище;
зміна умов самого процесу;
значні часові затримки (запізнення);
внутрішні зв’язки процесу.
Запізнення сигналів чи наявність зон нечутливості (мертвих зон) є серйозною проблемою для керування. Через те, що регулятор функціонує на основі застарілих даних, тому він може видавати хибні (фальшиві) команди.
Якщо сигнал від мікрофону поступає з затримкою, більшою ніж 0,2÷0,4 с, то ви швидко збиваєтесь і перестаєте розмовляти. Цей приклад наочно демонструє нестійкість, що виникла через затримку в часі.
Регулятор в системі з часовими затримками повинен “пам’ятати” старі (попередні) керуючі дії.
Врахування внутрішніх взаємозв’язків додає багато складності в модель процесу, якщо навіть він в своїй основі простий. Прикладом цього може служити задача регулювання температури в кімнатах будинку. Якщо вікно відчиняється в одній з кімнат, то температура змінюється не тільки локально, але і в деякій мірі в сусідніх кімнатах.
 Модель
системи з внутрішніми зв’язками
зображена на рис. 1.7:
Модель
системи з внутрішніми зв’язками
зображена на рис. 1.7:
вхідні сигнали вихідні сигнали
Рис. 1.7.