

Розділ 1. Системи і управління
1.1. Основи управління
Управління – це будь-який цілеспрямований процес при наявній інформації:
U=F(A,I) , де
А – бажаний стан (рух, процес)
І – інформація
U – управління (управляюча дія)
Розрізняють автоматичне і автоматизоване управління.
Автоматичне управління передбачає мати в колі зворотнього зв’язку тільки технічні засоби.
Автоматизоване управління передбачає у колах зворотнього зв’язку наявність не тільки технічних засобів, але і людини (оператора) (рис. 1.1).
1.1.1. Загальна модель управління
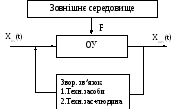
ОУ – об’єкт управління
Xвх(t) – вхідна дія
Xвих(t) – вихідна дія
Рис. 1.1 F – збурюючі дії від впливу зовнішнього середовища, котрі намагаються вивести ОУ з заданого (бажаного) стану
При розв’язанні складних задач, якщо недостатньо лише технічних засобів, то використовуються технічні засоби і людина (для прийняття рішень).
Задача
управління об’єктом зводиться до того,
щоб вибрати необхідні вхідні дії Х![]() (t),
котрі при будь-яких збурюючих діях F
забезпечували б задане значення вихідної
величини Х
(t),
котрі при будь-яких збурюючих діях F
забезпечували б задане значення вихідної
величини Х![]() (t).
(t).
У системах автоматичного регулювання (САР) підтримується вихідна величина на одному заданому рівні (рис. 1.2). У системах автоматичного управління (САУ) вихідна величина залежить від часу (рис. 1.3).
 САР:
САУ:
САР:
САУ:
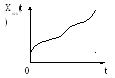
Рис. 1.2. Рис. 1.3.
Автоматичне і автоматизоване управління базується на загальних принципах і методах.
Автоматизоване управління використовується в складних великих системах, елементи яких значно важче описувати формалізовано, ніж елементи автоматичних систем.
Під кібернетикою розуміють специфічний науково-методичний напрямок дослідження управління в процесах, системах різного рівня і складності, включаючи технічні, організаційно-технологічні, біологічні і соціально-економічні, які об’єднані наявністю мети, а також функцій керування.
Цей напрямок має такі дисципліни:
а). Теорія інформації;
б). Теорія автоматів;
в). Теорія автоматичного управління;
г). Теорія розпізнавання образів.
Питаннями структурної організації систем великої складності та стохастичної поведінки з різноманітними взаємозв’язками займається системотехніка.
1.2. Роль комп’ютерної техніки в управлінні процесами
Умови, які спричинили розвиток і впровадження АСУ:
Розвиток промисловості, номенклатури товарів.
Збільшення зв’язків, кооперація між підприємствами.
Ріст необхідних математичних досліджень.
Швидка змінність виробів.