

2.2. Передатна функція
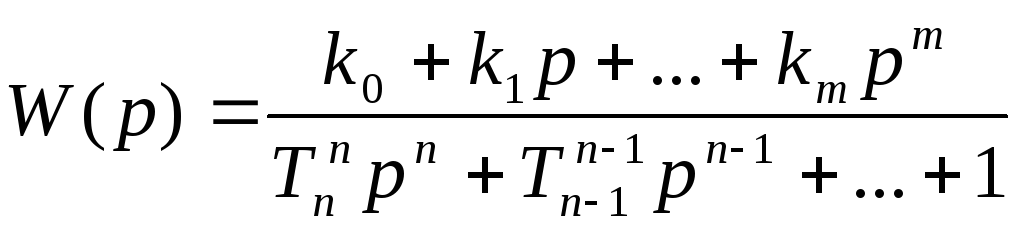
Передатною функцією називається відношення перетвореної за Лапласом вихідної дії до перетвореної за Лапласом вхідної дії при нульових умовах і відсутності збурень.
Нульові початкові умови означають не тільки рівність f(t)=0 при t=0, але й нульові умови у всіх похідних до (n-1) включно, де n – порядок системи.
![]()
![]() -
зображення рівняння руху системи в
Лапласівській формі,
-
зображення рівняння руху системи в
Лапласівській формі,
де
![]()
З
іншого боку р=j,
де =2f
– кутова частота, а
![]() .
.
2.3. Правила спрощення структурних схем
Часто буває так, що реальна система (чи модель системи) зображається сукупністю зв’язаних між собою передатних функцій, які утворюють складну структурну схему.
При задачі аналізу виникає потреба знаходження результуючої передатної функції, тобто спрощення структурної схеми.
Приклад 1.
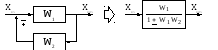
Спрощення структурної схеми, зображеної на рис. 2.10, до виду, зображеного на рис. 2.11.

Рис. 2.10. Рис. 2.11
Послідовне з’єднання:

П
 аралельнез’єднання:
аралельнез’єднання:
Зворотній зв’язок:
П
 ереміщення
вузла проти проходження сигналу:
ереміщення
вузла проти проходження сигналу:
П
 ереміщення
вузла за проходженням сигналу:
ереміщення
вузла за проходженням сигналу:
Якщо вузол переноситься проти напрямку проходження сигналу, то у вітку, що переноситься, необхідно включити всі елементи з передатними функціями, які зустрічаються між старим і новим вузлом.
Якщо вузол переноситься за напрямком проходження сигналу, то у вітку, що переноситься, необхідно включити всі елементи з оберненими передатними функціями, які зустрічаються між старим і новим вузлом.
П
 ереміщення
точки сумування за проходженням
сигналу:
ереміщення
точки сумування за проходженням
сигналу:Переміщення точки сумування проти проходження сигналу:
 Якщо точка сумувань
переноситься за напрямком проходження
сигналу, то у вітку, що переноситься,
необхідно включити передатні функції
всіх елементів, які зустрічаються на
шляху між старою і новою точками
сумування.
Якщо точка сумувань
переноситься за напрямком проходження
сигналу, то у вітку, що переноситься,
необхідно включити передатні функції
всіх елементів, які зустрічаються на
шляху між старою і новою точками
сумування.
Якщо точка сумувань переноситься проти напрямку проходження сигналу, то у вітку, що переноситься, необхідно включити елементи з оберненими передатними функціями всіх елементів, які зустрічаються на шляху між старою і новою точками сумування.
Результуюча передатна функція структурної схеми, зображеної на рис. 2.10, використовуючи правила 1-3, буде мати вид
![]()
2.4. Частотні характеристики
Розрізняють 4 типи частотних характеристик:
АФЧХ – амплітудо-фазо-частотна характеристика.
АЧХ - амплітудо-частотна характеристика.
ФЧХ - фазо-частотна характеристика.
ЛАФЧХ – логарифмічна амплітудо-фазо-частотна характеристика.
Оскільки більшість задач можна розв’язати в частотній області, наприклад, оцінити стійкість системи, визначити запас стійкості, розрахувати коректуючі елементи і т. ін., то повернення в часову область (зворотнє перетворення Лапласа) може не здійснюватись.
Амплітудо-фазо-частотна характеристика – це геометричне місце кінців вектора передатної функції при зміні частоти від 0 до +.