

4.3. Стійкість імпульсних систем
Загальний вигляд рівняння руху імпульсної системи, що знаходиться під впливом вхідної дії.
![]() /1/
/1/
Тоді, в розгорнутому вигляді рівняння /1/ буде:
![]() /2/
/2/
Загальний розв’язок рівняння:
![]() /3/
/3/
![]() –вимушений рух
системи;
–вимушений рух
системи;
![]() –
вільний (власний) рух системи
–
вільний (власний) рух системи
Про стійкість судять за власним рухом системи, отже:
![]() /4/
/4/
Розв’язок
цього рівняння будемо шукати у вигляді
![]() ,
,![]() ,
тобто
,
тобто![]() з врахуванням /4/ має вигляд:
з врахуванням /4/ має вигляд:
![]()
Після скорочення на uT отримаємо:
![]() /5/
/5/
Позначивши uT=Z, отримаємо характеристичне рівняння вільного руху імпульсної системи.
![]() /6/
/6/
Розв’язок рівняння /6/ має вигляд:
![]() /7/
/7/
![]() –корені
характеристичного рівняння
–корені
характеристичного рівняння
![]() –постійні
коефіцієнти, що визначаються з початкових
умов.
–постійні
коефіцієнти, що визначаються з початкових
умов.
![]()
Розв’язок рівняння /7/ буде сходитися, а система, що має характеристичне рівняння /6/ буде стійкою, якщо
![]() /8/
/8/
Ця
умова виконується тоді, коли кожен
доданок /7/
задовільняє
умові
![]() ,
а це буде тоді, коли всі корені
,
а це буде тоді, коли всі корені
![]() по модулю менші одиниці.
по модулю менші одиниці.
![]() при
при
![]()
Таким
чином, необхідною
і достатньою умовою стійкості імпульсної
системи є умова
![]() для всіх коренів характеристичного
рівняння, що відповідає різницевому
рівнянню системи.
для всіх коренів характеристичного
рівняння, що відповідає різницевому
рівнянню системи.
Враховуючи,
що
![]() ,
перетворимо площину комплексної змінноїр
в комплексну площину коренів z
(рис.4.4).
,
перетворимо площину комплексної змінноїр
в комплексну площину коренів z
(рис.4.4).
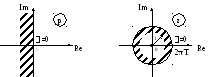
Рис. 4.4.
Список літератури до розділу 4:
Рабинер Л., Гоулд Б. Теория и применение цифровой обработки сигналов. – М.: Изд-во “Мир”, 1978. – 834с.
Дьяконов В.П. VisSim+Mathcad+MATLAB. Визуальное математическое моделирование. – М.: СОЛОН-Пресс, 2004. – 384с.
Артюшин Л.М. та ін. Теорія автоматичного керування. Навч. посібник.- Львів: Вид-во УАД, 2004. – 272с.
Чаки Ф. Современная теория управления. – М.: Мир, 1975. – 424с.