

1 (Это предположение вполне обосновано результатами экспериментальных исследований.)

Рис. 9. Блок-схема контура управления с учетом ряда характеристик человека-оператора
Основная задача человека-оператора заключается в управлении системой некоторым предписанным образом. Следовательно, как только мы выделяем соответствующие ограничения и шумы, вводимые человеком, основной проблемой становится проблема выбора соответствующего критерия оптимизации. В рассматриваемом случае в качестве критерия был выбран функционал

Задача оператора тогда заключается в выборе такого u*(t), которое минимизирует функционал (14). В (14) субъективные веса удовлетворяют условиям qi≥0; r≥0; g>0. Следует отметить, что выбор веса - далеко не тривиальная задача. Введение члена с и связано с необходимостью аппроксимации динамических характеристик нервно-мышечной системы.
Движение системы определяется следующими уравнениями состояния:

где n - мерный векторах - состояние системы, u - управляющее воздействие человека (скаляр); W - внешние возмущения. Учитывая вышеотмеченные ограничения, в текущий момент времени человек будет на входе иметь

Выбор в качестве критерия функционала (14) при уравнении движения (15) приводит к наличию линейной обратной связи. Тогда, если мы примем общие предположения относительно управляемости и наблюдаемости системы управления с учетом вышеназванных условий, разработка модели сведется к решению хорошо разработанной и достаточно подробно освещенной в специальных работах задачи аналитического конструирования регуляторов с задержкой во времени и с наличием шумов наблюдения и выхода. Оптимальная оценка и выбор управляющего воздействия могут быть осуществлены комбинацией Калмэна - Винера и оптимального предсказателя.

Рис. 10. Блок-схема контура управления с индикатором предсказания
Следует отметить, что фильтр Калмэна включает модель динамических характеристик объекта управления, т. е. этот подход может быть применен для описания деятельности и в том случае, когда характеристики системы изменяются во времени. Учитывая то обстоятельство, что при построении оптимальной модели снимаются почти все ограничения, существенные для квазилинейных моделей, эти модели в ближайшее время займут, как нам кажется, ведущее место при математическом моделировании деятельности в режиме слежения.

Рис. 11. Схема контура управления для расчета индекса трудности
Пример использования математической модели. При проектировании деятельности задача инженерного психолога заключается прежде всего в разработке требований к средствам отображения и органам управления. Математические модели деятельности должны являться основным инструментом решения этой задачи. Проиллюстрируем возможности моделирования на конкретном примере.
В последнее время все более широко начинает применяться так называемый индикатор с предвидением, блок-схема которого показана на рис. 10. Эти индикационные устройства оказались весьма эффективным средством управления сложными динамическими объектами. Разработка индикаторов с предвидением, в частности, требует ответа на вопрос об оптимальном значении времени предвидения. Выбор значения времени предвидения не только определяет требования к техническим элементам, но и оказывает существенное влияние на характеристики деятельности человека.
Попробуем рассчитать значение оптимального времени предвидения, пользуясь некоторыми модификациями общей формы квазилинейной модели, представленной выражением (10) и схемой расчета, предложенной Холлистером [41] . Предположим, что человек включен в систему управления, как показано на рис. 11, и ему отображается по обычной компенсаторной схеме величина рассогласования. Далее предположим, что величина TL упреждения, вводимого человеком, должна соответствовать оптимальному значению времени предвидения. (Это предположение можно обосновать из "пересекающейся" модели Мак-Руера (см. табл. 3.) Для частот, на которых человек вводит упреждение, значение управляющего воздействия u(t) больше, чем ошибка, производимая усилением Кр. Для частот, на которых человек вводит задержку, u(t) меньше, чем Кpε.
Введем коэффициент упреждения

Как видно из (17), если доминирует упреждение TL, то L>I; если доминирует задержка T1, то L<1 и L≅1, когда Wr(jω)≅Kp. Введем, далее, индекс трудности D

Как видно из (18), трудность возрастает при возрастании TL и Т1 и равна нулю при L=1, что в общем соответствует эмпирическим данным. Пусть W0(jω)=K0/(jω)2. Как следует из табл. 4, для объекта с такой передаточной функцией

В (19) предполагается, что TL введением человек компенсирует также эффективное время запаздывания, т. е. τε≅0.
Пусть х=const, тогда на систему будет воздействовать шум n(t), который без потери общности считаем белым шумом со спектральной плотностью SN=A/π. Применив известную процедуру спектрального анализа, можно получить


Коэффициент упреждения тогда

Исключая из (20), (21) и (22) Кр и Tp, получим

Предположим, что критерий качества, минимизуемый человеком, является линейной комбинацией среднеквадратичной ошибки и среднеквадратичного отклонения. Оптимальная деятельность тогда будет иметь место при L=3 (рис. 12). Принимая, что TLопт соответствует оптимальному значению L из (22),

Для простых случаев Кр может быть определено из (17), если положить, что L=3. Исключив Кр из (24) и (17), получим

Оптимальное значение времени предвидения τLопт=ТLопт. рассчитывается по формуле (25). Более точная оценка TL может быть получена на основе построения оптимальной модели для режима слежения с предвидением. Однако сравнение расчетных данных, полученных по формуле (25), с данными, полученными в наших экспериментах, был удовлетворительным с точки зрения проектирования и расхождение не превышало 12 %.

Рис. 12. Зависимость качества слежения от индекса трудности для объекта 2-го порядка
Таким образом, изучение деятельности оператора в режиме слежения с позиций ТАУ открывает новые возможности оптимизации автоматизированных систем.
Дальнейшее развитие методов теории автоматического регулирования применительно к деятельности человека-оператора неизбежно нуждается в психологической интерпретации и в более строгом учете в моделях таких свойств
поведения, как адаптивность, нелинейность, дискретность, стохастичность и т. п. Это важно как для решения задач инженерно-психологического проектирования, так и для более глубокого и строгого анализа функционирования механизмов психической регуляции.
Структурно-алгоритмические модели деятельности
Рассматриваемый класс моделей основывается на структурно-алгоритмическом подходе, для которого характерны следующие положения:
1. Моделируется деятельность специалистов-операторов в эргатических системах, причем специалист интерпретируется как управляющая подсистема в системе управления.
2. Специфика деятельности определяется ее объектами (объектами управления), условиями и целями, которые описываются, как это принято при автоматизации объектов управления [42; 43].
3. Допускается принципиальная алгоритмизуемость деятельности и применяется ее алгоритмизация средствами алгоритмического языка.
4. В динамике деятельности рассматривается как случайный процесс с конечным числом состояний, а в статике - как система элементов (операций, состояний и т. п.), взаимосвязанных с определенными вероятностями, которая описывается специальными стохастическими матрицами и графами [44; 45].
Пусть в терминах, используемых при алгоритмическом описании объектов управления, определены l задач и m режимов работы специалиста, причем в силу некоторой энтропии ситуации решение i-той задачи (i=1, 2,..., l) в r-м режиме (r=1,2,..., m) возможно n способами, так что i-тый способ (j=1, 2, ..., n) выбирается специалистом, смотря по обстоятельствам, либо из числа заученных в прошлом, либо благодаря эвристической деятельности. Иначе говоря, i-тая задача в r-м режиме решается специалистом по вероятностному алгоритму, каждая i-тая реализация которого осуществляется с некоторой частотой frij, определенной на полной группе n несовместных реализаций, и представляет собой детерминированную последовательность конечного числа некоторых элементарных операций. Тогда, кодируя операции той реализации j-того алгоритма в некотором алфавите символов, можно построить ориентированный граф (орграф), вершины которого суть символы операций, а дуги (стрелки) между вершинами обоз- чают "переходы" между операциями. Такому орграфу изоморфна матрица смежности; это квадратная матрица Аrij, число строк и столбцов которой на единицу больше количества различных операций j-той реализации, а элементы которой арq характеризуют частоту следования операции q непосредственно за операцией р(арq=0, 1, 2, ...). Например, последовательность Х, Z, Y, Z, Y изображается орграфом и матрицей смежности, как показано на рис. 13.

Рис. 13. Изображение реализации вероятного алгоритма в виде орграфа (а) и матрицы смежности (б)
Пусть для той задачи в r-м режиме определены все n реализаций, т. е. заданы матрицы1 Arij и частоты frij. Тогда они обобщаются в матрицу Bri, описывающую вероятностный алгоритм решения i-той задачи в r-м режиме

1 (Здесь и в дальнейшем имеются в виду матрицы смежности.)
Операция обобщения

осуществляется следующим образом:
1) из строк матриц Аrij выбираются все различные символы операций, которые образуют упорядоченные строки и столбцы основы матрицы В(o)ri; 2) в каждую Arij добавляют строки и столбцы (с нулевыми элементами), символы которых входят в B(o)ri отсутствовали в Arij; 3) дополненную таким образом Аrij перестановкой рядов приводят к одной и той же упорядоченной форме В(o)ri; 4) поэлементно суммируют все Аrij в матрицу Вri, предварительно взвешивая их частотами Например, пусть i=l,2; fri1 = 1: fri2=2 и матрицы Arij есть

Тогда формируем В(o)ri - основу матрицы Вri - и дополняем до В(o)ri;Ari1, вписывая X и Z строку и столбец У, и Аri2 переставляя ряды Z и Y и приписывая в качестве первых строку и столбец X:

Дальнейшее очевидно:

Обобщение можно выполнять и на графах1, как показано на рис. 14.
1 (Здесь и в дальнейшем имеются в виду ографы.)
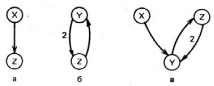
Рис. 14. Пример обобщения графов: а - граф для матрицы Аri; б - граф для матрицы Аri; в - граф для матрицы Вri, обобщенный из а и б
Аналогично (26) получаются: матрица Сr для r-го режима работы

и матрица D для работы специалиста при всех m режимах

где fri - частота появления i-той задачи в r-м режиме; fr - частота r-го режима в деятельности специалиста, остальные обозначения введены выше.
Структур но-алгоритмическая модель деятельности специалиста представляет собой, таким образом, совокупность матриц Arij Bri и Сr или (и) изоморфных им графов, которые могут быть обобщены, согласно (28), в матрицу D, либо в граф, описывающий деятельность в целом. По особенностям интерпретации понятия элементарной операции, кодирования операций и оценки частот можно выделить операционно-логическую и предметно-функциональную модели, а также модель для оценки надежности комплексных систем "человек - техника".

Рис. 15. Блок-схема системы управления
Операционно-логическая модель. Пусть множество элементарных операций, из которых строятся алгоритмы деятельности, разбито на подмножества сенсорных (афферентных), моторных (эфферентных) и логических (центральных) операций. Тогда операционно-логической (ОЛ) моделью назовем граф, вершины которого суть коды сенсорных, моторых и логических операций, а дуги - это импликации, характеризуемые частотой. Такому графу всегда изоморфна матрица смежности, которая, следовательно, тоже является ОЛ-моделью.
Как показано выше, можно различать ОЛ-модели: на уровне реализации алгоритма (матрицы Arif), на уровне алгоритма задачи (матрицы Bri), на уровне режима работы (матрицы Сr) и, наконец, на уровне деятельности в целом (матрицы D). Очевидно, что построение модели вышележащего уровня предполагает построение моделей всех нижележащих уровней, причем определяющими здесь являются полнота качественного описания событий, образующих нижележащий уровень, и способ оценки частот включения матриц нижележащего уровня в матрицу вышележащего. Перечисление режимов работы и задач, выполняемых специалистом, обычно не вызывает трудностей. Трудности возникают при алгоритмизации решения специалистом выделенных задач и при оценке частот. В этой связи рассмотрим пример построения ОЛ-модели на уровне алгоритма задачи.
Пусть имеется система управления (рис. 15), состоящая из объекта и специалиста (спецификация параметров приведена в табл. 5), в которой решается задача "изменить выход продукта на заданную величину". В распространенной записи [45] алгоритм этой задачи в аналитической форме имеет вид

где z1, z2, х, y, и - текущие значения параметров (табл. 5);


Таблица 5. Спецификация параметров для построения алгоритмов задачи
Форма (29) не дает, однако сведений ни о частотах fj - реализаций алгоритма, ни об их количестве. Один из возможных способов получения таких сведений основывается на том очевидном обстоятельстве, что частота апостериори есть функция исходов опыта. Но исходы опыта можно перечислить и априори, как возможные реализации формы (29), получаемые по комбинациям значений логических условий:



Заметим, что последняя реализация (29в)* не определена, так как заканчивается циклом ↓2xy(q2=0)↑2, из которого не указано правило "выхода".

Таблица 6. Оценка вероятности Р(k) и степени (k) цикла в алгоритме
(Примечание. Для k≤4 ради простоты выбрано fj=ant{10P(k)}.)
Очевидно, любой цикл для устойчивого регулятора должен иметь конечную, причем небольшую по величине степень. Для человека в подобных задачах, как показали теоретические выкладки А. И. Губинского и данные эксперимента, вероятность повторения такого цикла ровно к раз подчиняется геометрическому распределению Р(к) = qkp, параметры q и р которого зависят от обстоятельств. На основании обобщения опытных данных можно принять оценки вероятностей Р(k) 9 представленные в табл. 6. Можно видеть, что с вероятностью Р(k≤4)=0,87 реализуются варианты алгоритма (29), включающие циклы со степенями k= 0÷4. Тогда, рассматривая реализацию (29а) как имеющую указанный цикл в нулевой степени, можем перечислить дополнительно четыре реализации

где степень цикла изображена в виде показателя степени у квадратных скобок, заключающих символическую запись цикла.
Таким образом, с достаточной вероятностью возможны пять реализаций вероятностного алгоритма (29), описывающие управление исправным объектом. Шестая реализация (29а) описывает управление при неисправности объекта.
Для получения ОЛ-модели на уровне алгоритма, согласно уравнению (26), необходимо построить матрицу. Так как в алгоритме (29) всего восемь вершин (за семь вершин принимаются операции, за восьмую - внешняя среда), то матрица Aj имеет порядок 8 и содержит 56 элементов. Однако из них только 9 элементов отличны от нуля. Поэтому можно использовать либо способ обобщения матриц, изложенный в [46] , либо обобщать орграфы реализаций.

Рис. 16. Графы реализаций (29а) - (29е) алгоритма (29)
На рис. 16 изображены графы невзвешенных реализаций (29а-29е) алгоритма (29). Учитывая, что реализации (29б), (29в) и (29г) имеют частоты, отличные от единиц (согласно табл. 6, f29б=3; f29в=2; f29г=2), необходимо соответствующие графы умножить на эти частоты. В результате получаются графы (29б)*, (29в)* и (29г)*, показанные на рис. 17. Суммируя эти графы с графами (29а), (29д) и (29е) на предыдущем рисунке, получаем граф алгоритма (29), изображенный внизу на рис. 17. Для этого орграфа не представляет труда построить матрицу вида Вri.

Рис. 17. Взвешенные графы (29б)*, (29в)* (29г)* реализаций (29б), (29в) и (29г) соответственно: 29) - граф ОЛ-модели на уровне алгоритма задачи, полученный обобщением графов (29б)*, (29в)* и (29г)* и графов (29а), (29д) и (29е), представленных на рис. 16
ОЛ-модели различных уровней могут использоваться для психофизиологического анализа деятельности, для составления должностных инструкций, для разработки обучающих заданий и тренажеров при подготовке специалистов. Кроме того, ОЛ-модели служат основой для разработки информационных моделей: с этой целью они преобразуются в предметно-функциональную форму.
Предметно-функциональная модель. В натурных условиях сенсорные, моторные и логические операции, из которых состоят алгоритмы деятельности, воплощены в предметные действия ("работы") с определенными средствами контроля и управления. Назовем предметно-функциональной (ПФ) моделью деятельности граф, вершины которого определены предметно, в виде материально-технических и людских средств контроля и управления, а дуги, характеризуемые частотой, определены функционально, в виде пространственных перемещений специалиста, а также поступающей к нему и исходящей от него информации. Изоморфным представлением графа ПФ-модели служит матрица смежности.
Целесообразно снова различать ПФ-модели на уровнях реализации алгоритма, алгоритма задачи, режима работы и деятельности в целом, причем построения ПФ-моделей осуществляется последовательно от нижележащих к вышележащим уровням. При общем методе описания практические способы получения ПФ-моделей различны для существующих и вновь проектируемых эргатических систем.
Для существующих систем определение ПФ-модели осуществляется статистически путем натурных наблюдений деятельности специалиста. При этом либо многократно наблюдается процесс решения каждой задачи в каждом из режимов, и тогда используется уже рассмотренная процедура, задаваемая уравнениями (26)-(28), либо N-кратно наблюдается деятельность специалиста в течение рабочего дня (смены, дежурства и т. п. ). Тогда в результате g-того наблюдения (g=1,2, .., N) получается матрица Ag, изображающая g-тую реализацию ПФ-модели. Нетрудно видеть, что если в уравнении (28) принять частоты fr=fri=frij=1 и обозначить N=min, то матрица D для ПФ-модели на уровне деятельности в целом может быть получена обобщением

где матрицы Ag и Arij отнюдь не равны, но эквивалентны по смыслу как реализации одной и той же стохастической матрицы.
Для вновь проектируемых систем ПФ-модели получают из ОЛ-моделей. ПФ-модель представляет собой определенную "свертку" OJl-модели того же уровня. При этом сенсорные, моторные и логические операции "материализуются" в конкретные средства контроля и управления, на базе которых создается информационная модель. Из-за разнообразия этих средств не существует единственного ПФ-представления ОЛ-модели, так что необходимо предварительно наметить характерные особенности информационной модели, в частности выбрать уровни обобщенности для индикации параметров, средств кодирования, мнемоники или хотя бы только наметить требуемые средства контроля и управления (которые затем конкретизируются согласно отраслевой номенклатуре).
Рассмотрим построение ПФ-модели из ОЛ-модели на уровне алгоритма задачи (см. табл. 5, рис. 17). Для операций zx и и средства получения команд и докладов можно объединить в селекторе (С). Пусть состояние исправности объекта сигнализируется индикатором И1, значения y - индикатором И2, а значения х изменяются органом управления ОУ. Тогда логический оператор q1 "поглощается" индикатором И1, а логический оператор g2 "материализуется" в виде мнемоники (М) - списка значений х (или показаний И2), соответствующих требуемым уровням y (или положениям ОУ). Дальнейшую процедуру удобнее показать на графах. Множество вершин, изображающих средства контроля и управления, соединяются дугами в соответствии с исходным графом ОЛ-модели, как показано на рис. 18, в результате получается реализация ПФ-модели в виде графа (30а).
Заметим, что, как и для ОЛ-модели, для ПФ-модели возможны различные реализации, структуры которых зависят от многих обстоятельств. В частности, существенными являются психофизиологические свойства и состояния специалиста. Множества таких состояний, вообще говоря, счетны, но перечислить соответствующие им реализации затруднительно. Так, например, если учитывать в рассматриваемом случае только два соотношения памяти относительно заданных и текущих значений х и y, то возможны 16 исходов с различными графами, которые должны войти в ПФ-модель. В этой связи теоретически и практически важной задачей является установление меры деталировки реализаций в зависимости от числа психофизиологических переменных, которые на этапе проектирования информационной модели необходимо учитывать хотя бы для получения подходящих оценок частоты вершин и дуг результирующего ПФ-графа. Формулируя эту задачу, мы в настоящее время далеки от ее решения. Одним из гипотетических частных решений может быть следующее.
Ограничим число реализаций ПФ-модели тремя достаточно очевидными исходами A1, A2 и A3, где А1 - соответствует деятельности обученного специалиста, всегда выполняющего поблочный контроль правильности исполнения команды. Этот исход был априори заложен в алгоритме (29) и реализуется в ПФ-графе (30а) на рис. 18. Исход А2 соответствует деятельности квалифицированного специалиста, самонадеянно использующего свой профессиональный опыт и не выполняющего по этой причине поблочного контроля; здесь мнемоника (М) не используется, и реализация ПФ-графа имеет вид (306) на рис. 18. Исход А3 соответствует деятельности малоквалифицированного или "робкого" специалиста, контролирующего по мнемонике каждое свое сенсорное и моторное действие; этому соответствует реализация ПФ-графа (30в) на рис. 18.

Рис. 18. Построение ПФ-модели: (30) - преобразование ОЛ-графа (29) в ПФ-граф (30а); пунктиром изображены новые вершины. (30а), (30б) и (30в) - реализация ПФ-модели (объяснение в тексте)
Используя для получения ПФ-модели на уровне алгоритма задачи уравнения (26), следует определить частоты fj(j=1, 2, 3). Это можно сделать, например, исходя из следующих правдоподобных допущений. Пусть профессиональная деятельность осуществляется в течение 25 лет, из которых 5 лет специалист обучается. Пусть, далее, в одной четверти случаев обученный специалист по каким-то причинам не использует мнемонику. Тогда очевидно: Р(А3)=0,2; Р(А1+А2)=0,8; Р(А2)=0,25 Х Р(А1+А2)=0,2 и Р(А1)=0,6, т. е. Р(А1) втрое больше, чем Р(А2), равная Р(А3). Приняв для удобства весовые частоты у целочисленными, получаем f1=3, f2=f3=1. Реализация (30а), взвешенная f1=3, представлена в виде (30г) на рис. 19. Объединяя далее реализации (30б), (30в) и (30г), получаем искомый граф (31), изображающий ПФ-модель на уровне алгоритма задачи.
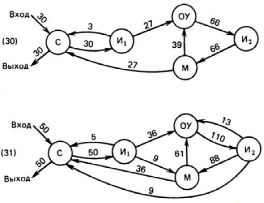
Рис. 19. Построение ПФ-модели (продолжение): (30г) - реализация (30а), взвешенная частотой f1=3. (31) - граф ПФ-модели на уровне алгоритма задачи
Совокупность ПФ-моделей всех уровней, полученных из ОЛ-моделей или путем натурных наблюдении, может служить в целях дальнейшего психофизиологического, "личностного и соматографического анализа деятельности, а также для рациональной компоновки рабочего места.
Теория надежности в изучении деятельности человека
В начале 50-х годов XX века в технике сформировалось новое научное направление - теория надежности, потребность в которой была продиктована логикой научно-технического прогресса. Неуклонный рост сложности технических средств; повышение ответственности функции, выполняемых отдельными элементами технических средств; расширение диапазона и одновременное усложение условий, в которых эксплуатируются современные технические средства, - вот те основные объективные причины, которые привели к необходимости разработки теории надежности и специальных методов ее исследования. "Теория надежности устанавливает закономерности возникновения отказов устройств и методы их прогнозирования; изыскивает способы повышения надежности изделий при конструировании и последующем изготовлении, а также приемы поддержания надежности во время их хранения и эксплуатации... Теория надежности вводит в рассмотрение количественные показатели качества продукции" [47. С. 10].
Целенаправленное функционирование любой автоматизированной системы управления будет зависеть, с одной стороны, от безотказной работы ее технической части, а с другой - насколько своевременно и безошибочно (иными словами, надежно) станет выполнять возложенные на него функции человек-оператор. Уже на стадии проектирования будущей автоматизированной системы управления появляется потребность в данных по надежности выполнения человеком-оператором широкого круга операции, входящих в алгоритм его работы. Необходимо, например, знать, сколько времени оператор может выполнять те или иные действия с заданной точностью, как изменяется его надежность в течение рабочего дня, в каких условиях человек начинает работать ненадежно, в чем причины его ошибочных действий и т. д. Большая практическая и теоретическая важность этих вопросов и сделала проблему надежности человека-оператора одной из центральных проблем инженерной психологии.
Остановимся на рассмотрении самых основных понятии теории надежности комплексных систем "человек - техника (СЧТ). Целесообразность функционирования является той принципиальной особенностью любой СЧ1, которая делает ее отличной от технических систем. В связи с этим наиболее общими для СЧТ являются оценки их результативности по отношению к поставленной перед системой цели. Подход к оценке надежности с таких позиций получил название прагматического, при этом предлагается различать соответственно прагматическую эффективность и надежность(48).
Прагматическая эффективность СЧТ - это способность (свойство) СЧТ достигать поставленной цели с определенным качеством, обусловливающим эффект от достижения цели.
Прагматическая надежность СЧТ - это способность (свойство) СЧТ в принципе (независимо от качества) достигать поставленной цели.
Из приведенных определений видно, что понятие прагматической эффективности шире понятия прагматической надежности и поэтому первое включает в себя в качестве составляющей второе.
Работоспособность и готовность являются понятиями, характеризующими состояния СЧТ. Работоспособность - это состояние СЧТ, при котором в данный момент времени она способна выполнять заданные функции с выходными параметрами, соответствующими требованиям данной задачи. В применении к оператору работоспособность - это состояние человека, при котором он в данный момент времени соответствует всем требованиям в отношении свойств, обеспечивающих выполнение заданных функций. Готовность - это состояние СЧТ, при котором возможно ее функционирование в соответствии с целеназначением. В применении к оператору готовность - это состояние человека, при котором он готов к действию по выполнению заданных функций управления.
Отказ является тем фундаментальным понятием, на котором возведено современное здание теории надежности в технике. Совершенно очевидно, что оценка надежности работы операторов окажется невозможной, если предварительно четко не определить, что в ней будет приниматься за отказ. В общем случае в применении к СЧТ под отказом понимается такое ее состояние, при котором требуется выполнение определенной задачи, но система не может функционировать, т. е. иначе говоря, нарушается целенаправленная работа системы. Для оператора отказ - это такое его состояние, при котором требуется выполнение функций управления, но человек не может их выполнить ввиду утомления, временной утраты трудоспособности и т. д. При этом все возможные отказы оператора могут быть в принципе расклассифицированы на три типа. Временно-неустойчивый отказ - это* наиболее типичный для оператора "психологический" тип отказа (ошибка). К отказам типа ошибки могут относиться события, состоящие в неправильном восприятии здоровым оператором информации, в неправильном принятии решения или неправильной его реализации. Последствия ошибок могут в общем случае проявляться в невозможности дальнейшего применения технических средств или снижении эффективности их применения. Временно-устойчивый отказ - это событие, состоящее в возникновении болезненных изменений в органах человека и приводящее к потере им работоспособности, к невозможности выполнения заданных функций. Причинами такого рода отказов могут быть утомление; излечимый в определенные интервалы травматизм; функциональные расстройства под влиянием, например, стресс-факторов и т. п. Окончательный отказ - это фактически необратимые для конкретного человека изменения функционального состояния, при которых невозможна рабочая деятельность.
Из обшей теории надежности известно, что мера, посредством которой производится количественная оценка надежности, называется критерием надежности. В свою очередь, численное значение того или иного критерия, полученное из опыта и справедливое только для вполне конкретных условий, называется количественной характеристикой или просто характеристикой надежности [49].
В качестве критериев надежности человека-оператора в принципе могут быть использованы:
1. Вероятность безотказной работы в интервале времени от 0 до t: P(t) и соответственно вероятность отказа в интервале от 0 до t: Q(t), которые связаны между собой следующим образом:
P(t) + Q(t) = 1.
2. Частота отказов в момент времени t: ω (t).
3. Интенсивность отказов в момент времени t: λ(t).
4. Среднее время работы до отказа (первого): Тcp.
5. Среднее время работы между соседними отказами: tср.
6. Вероятность того, что в момент времени t оператор находится в
состоянии готовности.
Нет необходимости каждый раз пользоваться всеми перечисленными критериями. Их конкретный выбор должен определяться условиями исследуемой деятельности человека. Например, в случаях, когда ошибки могут считаться равноценными (это могут быть ошибки при выполнении однообразной работы: работа машинистки, телеграфиста и т. п.), возможно использование таких критериев, как среднее время безошибочной работы tcp, интенсивность ошибок λ(t) и др. Общее для всех критериев то, что они должны быть обязательно вероятностными.
Сложность и своеобразие проблемы надежности человека-оператора обусловили появление различных точек зрения относительно ее решения. Мы видим решение данной проблемы только с позиций ее системного анализа. Отличительной и главной чертой проблемы надежности человека-оператора является ее комплексный характер, из которого вытекает необходимость рассмотрения иерархической последовательности уровней, связанных между собой определенной логической очередностью, по обеспечению надежности работы человека-оператора в автоматизированной системе управления. В качестве таких основных уровней могут быть выделены следующие.
1. Уровень прогнозирования профессиональной пригодности. Здесь задача сводится к выявлению психофизиологических качеств человека, в основе которых лежат его нейрофизиологические особенности, вскрытию его потенциальных способностей к успешному овладению необходимой системой знаний, умений и навыков, без наличия которых было бы немыслимо в последующем эффективное и надежное выполнение оператором типовых задач, характерных для конкретного вида деятельности.
2. Уровень обучения и тренировки операторов. Основная цель данного уровня - обеспечить максимальную эффективность собственно процессов обучения и тренировки человека при овладении ям необходимой системой профессиональных знаний, умений и навыков.
3. Уровень интеграции человека с техническими средствами. На двух предыдущих уровнях закладываются необходимые и исключительно важные предпосылки будущей надежности работы человека-оператора. На данном уровне должна иметь место реализация уже целой совокупности мероприятий в плане обеспечения надежности функционирования СЧТ. Имеются в виду прежде всего распределение функций в системе между оператором и техническими средствами; организация рабочего места оператора; выбор оптимальных условий внешней среды, организация трудового процесса (степень информационной загруженности оператора, продолжительность работы, характер отдыха и т. д.).
При этом с методологической точки зрения экспериментальное исследование проблемы надежности человека-оператора на данном уровне возможно с позиций двух принципиально различных по своим целевым установкам подходов: макро- и микроподхода [50]. Суть макроподхода состоит в том, что он предполагает прежде всего концентрацию внимания на изучении особенностей поведения человека (т. е. на его "выходных характеристиках"). Например, с позиций макроподхода возможно изучение надежности человека-оператора как функции от конструктивного исполнения технических средств. Главная задача здесь состоит в максимальном уменьшении вероятности ошибок человека путем рационального конструирования оборудования. В рамках этого же подхода изучение работоспособности человека-оператора является центральным моментом. При этом основной акцент делается на изучении динамики работоспособности, характеристик основных ее фаз (врабатываемости, устойчивой работоспособности и ее падения), а также на выявлении факторов, от которых зависит продолжительность этих фаз и надежность работы оператора. Однако следует отметить, что при макроподходе остается нераскрытой природа механизмов, лежащих в основе поведения оператора. Исследование интимных механизмов регуляции деятельности и состояний человека при оптимальных и экстремальных условиях выдвигаются на передний план при микроподходе. Одна из перспектив такого подхода состоит в изучении биохимических основ индивидуальных различий, обусловленных свойствами нервной системы, и в анализе на микроуровне процессов, лежащих в основе отказов операторов [51].
4. Уровень количественных оценок надежности и эффективности систем "человек-техника". Необходимость разработки методов, которые позволяли бы осуществлять количественную оценку надежности СЧТ, настоятельно диктуется потребностями практики. Наличие количественных оценок позволяет придать объективный характер решению различного рода вопросов, которые возникают в процессе проектирования, создания и эксплуатации СЧТ [52; 53].
Расчет надежности СЧТ сводится к определению какой-либо одной или нескольких количественных характеристик надежности. Этому предшествует анализ деятельности оператора в системе, после чего надежность СЧТ должна уже рассчитываться на основе принятой структуры деятельности человека в соответствии с поставленной перед ним целью. Принцип иерархического структурирования деятельности человека и был положен в основу Структурного метода оценки надежности систем человек - техника [48; 53]. Согласно этому принципу анализ конкретной деятельности человека-оператора осуществляется как бы "сверху вниз" с представлением ее в виде структур на уровне совокупности решаемых задач (это высший или оперативный уровень структурирования деятельности человека), затем на уровнях отдельной задачи, отдельного алгоритма, блока операций и, наконец, Отдельной операции. При этом на каждом из перечисленных выше уровней рассмотрения применимы одни и те же критерии оценки, надежность выполнения структуры и временные затраты на ее выполнение. Уровень отдельных операций (под ними имеются в виду, например, операции считывания показаний с различных индикаторов, манипулирования органами управления, восприятия или выдачи речевой команды и др.) является на сегодня тем низшим уровнем, на котором завершается процесс структурирования деятельности человека-оператора. Количественная же оценка целостной структуры деятельности оператора осуществляется согласно рассматриваемому методу в обратной последовательности, т. е. "снизу вверх", и поэтому уровень отдельных операций является тем исходным уровнем, на котором необходимо располагать соответствующими надежностными характеристиками. Числовые значения выбранных критериев надежности выполнения человеком отдельных операций (например, вероятность безошибочного выполнения операции и временные затраты на ее осуществление) могут определяться либо на основании уже известных экспериментально-психологических данных, приведенных в литературе [54], либо путем проведения специальных испытаний на пульте управления или его макете. (Характеристики надежности технической части системы определяются с помощью традиционных методов теории надежности [49] и здесь рассматриваться не будут.) Обычно оценка надежности производится по усредненным надежностным характеристикам так называемого расчетного оператора. Временные и надежностные характеристики для расчетною оператора" должны получаться из эксперимента, поставленного на представительной выборке из соответствующей генеральной совокупности опера-торов. Представительность выборки может быть обеспечена проверкой у отбираемых в экспериментальную группу общих признаков, присущих всей генеральной совокупности и гарантирующих степень однородности, свойственную генеральной совокупности. Естественно, что сам перечень признаков, по которым комплектуется экспериментальная группа, зависит от конкретных целей, для которых производится получение экспериментальных данных. Чаще всего в качестве таких признаков берутся: состояние здоровья, степень обученности и тренированности, характеристика памяти, быстрота реакции и др. Для обеспечения состоятельности и несмещенности оценок надежностных и временных характеристик условия проведения эксперимента должны соответствовать реальным условиям окружающей среды, режиму труда и отдыха, степени напряженности?
и загруженности операторов, наличию положительной мотивации и т. п. Перед экспериментом по определению характеристик надежности должно быть четко сформулировано определение события, составляющего путь ошибки. Если эксперимент организован так, что предыдущие ошибки не оказывают существенного воздействия на появление ошибок при последующих повторениях операции, то число ошибок п может быть принято распределенным по биномиальному закону

где m - число появлений в эксперименте исследуемой на безошибочность операции, β - вероятность появления ошибок в единичном испытаний (при однократном исполнении операции).
Частота

- может быть принята при достаточно большом m в качестве оценки вероятности β. Точность оценок количественных показателей надежности характеризуется шириной доверительного интервала, а их достоверность - доверительной вероятностью. Доверительные границы для оценки Р*: P1 - нижняя и Р2 - верхняя с достоверностью γ, т. е. доверительный интеграл I(Р1Р2), с вероятностью у накрывающий истинное значение вероятности β, могут быть определены по формулам [55. С. 333]:

где величина tγ находится по таблицам в зависимости от выбранного уровня доверительной вероятности γ.
При ориентировочных расчетах в качестве закона распределения времени, затрачиваемого на выполнение одной операции, предлагается использовать гамма-распределение [53]:

где α - параметр, определяющий форму кривой распределения, β - тривиальный масштабный параметр, Г(α) - полная гамма-функция.
Параметры и моменты распределения связаны следующим образом:




На практике обычно известно среднее значение (математическое ожидание) m(t) и размах (tmax-tmin) затрачиваемого на выполнение операции времени. Точные аналитические зависимости вычисления среднего квадратического отклонения по размаху отсутствуют для гамма-распределения. Поэтому, когда имеются данные только по размаху и при этом можно предположить, что закон распределения величины близок к нормальному (что Может быть принято в качестве первого приближения в целом ряде случаев), величину среднеквадратического отклонения можно оценить по формуле

где k(n) - коэффициент, определяемый по табл. 7, n - число наблюдений (опытов).

Таблица 7. Таблица для расчета среднеквадратического отклонения о по размаху в зависимости от числа наблюдений (k(n) - коэффициент, определяемый по таблице; n - число наблюдений (опытов))
(См.: Бирюкова Р. Н. К вопросу о вычислении среднего квадратического отклонения по размаху//Гигиена и санитария. 1952. № 7.)
Ниже рассмотрим несколько типовых примеров по расчету структуры деятельности оператора на уровне выполнения им блока операций [53] . Наиболее часто встречающейся комбинацией операций в реальных алгоритмах является последовательное выполнение одной операции за другой в строго фиксированной последовательности. Если при этом допустить, что отказ всего блока (недостижение цели) происходит, если будет допущена ошибка хотя бы в выполнении одной операции, а затраты времени и совершение ошибок при выполнении i-той операции не зависят от затрат времени и ошибок в выполнении (i - 1)-той операции, то весь блок операций может быть сведен к одному эквивалентному со следующими характеристиками.


где Р'э - вероятность безошибочного выполнения эквивалентного блока операций, Р'i - вероятность безошибочного выполнения i-той операции (i=1, 2, ...,n), Р0э - вероятность ошибочного выполнения i-той операции.


где Тэ - время выполнения эквивалентного блока операций, Ti - время выполнения i-той операции, М(Тэ)- математическое ожидание времени выполнения эквивалентного блока операций, D(Tэ) - дисперсия времени выполнения эквивалентного блока операций.
В некоторых случаях оператор параллельно (одновременно) занят, например, выполнением двух операций сразу. Время, затрачиваемое на выполнение каждой операции, - случайная величина. Момент окончания блока операций в целом будем определять по времени окончания последней из них, т. е. когда и первая, и вторая операции закончены. Таким образом, время выполнения всего блока является также величиной случайной, которая определяется как

При условии независимости совершения ошибок в каждой из параллельно выполняемых операций вероятность безошибочного выполнения всего блока операций и вероятность ошибки будут, естественно, равны


Контроль за состоянием оператора рассматривается как один из эффективных методов повышения надежности его работы [56; 57]. Этот метод позволяет в первую очередь предупреждать временно-устойчивые отказы, связанные с временной потерей трудоспособности вследствие развития утомления, стрессового состояния и т. д.
В качестве же эффективного метода борьбы с "психологическими" отказами (или ошибками) оператор может использовать самоконтроль на всех основных этапах своей деятельности: прием, переработка и выдача информации [58]. В реальной деятельности человека может иметь место как пооперационный контроль (т. е. проверка результата выполнения каждой отдельной операции), так и контроль целого блока операций. Рассмотрим здесь случай выполнения блока последовательных операций и применение общего самоконтроля всего блока. Для этого необходимо ввести соответствующие характеристики операций самоконтроля: РK11 - вероятность признания при контроле правильного результата правильным; РK00 - вероятность признания ошибки ошибкой; РK10 - вероятность признания правильного результата после контроля ошибочным; РK01 - вероятность признания ошибочного результата правильным; M(Tk) и D(Tk) соответственно математическое ожидание времени контроля и его дисперсия. Тогда1, для данного случая можно использовать следующие расчетные формулы:

где в свою очередь

P'0 - это фактическая вероятность безошибочного выполнения эквивалентного блока основных операций; Р00 - вероятность противоположного события.
Временные же затраты на выполнение блока операций при введении общего для всего блока самоконтроля могут быть найдены из следующих зависимостей:

где

где

и

В заключение следует отметить, что отдельные направления в рамках проблемы надежности человека-оператора разработаны неодинаково. В этой связи особое внимание должно быть обращено на всестороннее исследование в теоретическом и экспериментальном плане психологических аспектов данной проблемы, поскольку в будущем именно эти знания должны лечь в основу общей теории надежности систем "человек - техника".
Литература
1. Лекторский В. А., Швырев B. C. Актуальные философско-методологические проблемы системного подхода//Вопросы философии. 1971. № 1. С. 146-152.
2. Грушин Б. А. Очерки логики исторического исследования. М., 1961.
3. Сетров М. И. Организация биосистемы. Л., 1971.
4. Сетров М. И. Общие принципы организации систем и их методологическое значение. Л., 1971.
5. Садовский В. Н., Юдин Э. Г. Задачи, методы и приложения общей теории систем//Исследования по общей теории систем. М., 1969. С. 3-22.
6. Xрамой А. В. К истории развития кибернетики//Философские вопросы кибернетики. М., 1961. С. 180-212.
7. Поваров Г. Н. Норберт Винер и его "кибернетика"//Винер Н. Кибернетика, или Управление и связь в животном и машине. М., 1968. С. 5-28.
8. Богданов А. А. Всеобщая организационная наука (тектология). М.-Л., 1925. Ч. I.
9. Богданов А. А. Всеобщая организационная наука (тектология). М.-Л., 1927. Ч.II.
10. Богданов А. А. Всеобщая организационная наука (тектология). М.-Л., 1929. Ч.III.
11. Bertalanffy L., von. Eine mnemonische Lebenstheorie als Mittelweg zwischen Mechanismus knol Vitalismus//Biol. Gen. 1927. Vol. 3,.
12. Винер H. Кибернетика, или управление и связь в животном и машине. М., 1968.
13. Берг А. И. О некоторых проблемах кибернетики//Вопросы философии. 1960. № 5.
14. Bertalanffy L., von. Vom sinn und der Einheit der Wissenschaften//Der Student. Wien, 1947. Vol. 2.
15. Bertalanffy L., von. An outline of general system theory//Brit. J. Phil. Sci. 1950. Vol. 1.
16. Bertalanffy L., von. General system theory//General System. 1956. Vol. 1.
17. Берталанфи Л. Общая теория систем - критический обзор//Исследования по общей теории систем. М., 1969. С. 23-82.
18. Лекторский В. А., Садовский В. Н. О принципах исследования систем (в связи с общей теорией систем Л. Берталанфи)//Вопросы философии. 1960. № 8.
19. Эшби У. Р. Введение в кибернетику. М., 1959.
20. Эшби У. Р. Конструкция мозга. М., 1964.
21. Эшби У. Р. Общая теория систем как новая научная дсциплина//Исследований по общей теории систем. М., 1969.
22. Rapoport A. Critiques of game theory//Behavioral Sci., 1959. Vol. 4.
23. Гаазе-Рапопорт М. Г. Автоматы и живые организмы. М., 1961.
24. Бир С. Кибернетика и управление производством. М., 1965.
25. Акофф Р. Общая теория систем и исследование систем как противоположные концепции науки о системах//Общая теория систем. М., 1966.
26. Месарович М. Основания общей теории систем//Общая теория систем. М., 1966.1
27. Блауберг И. В., Юдин Э. Г. Философские проблемы исследования систем и структур//Вопросы философии. 1970. № 5.
28. Малиновский А. А. Теория структур и ее место в системном подходе//Системные исследования. М., 1970.
29. Кедров Б. М. О соотношении форм движения материи в природе//Материалы к Всесоюзному совещанию по философским вопросам естествознания. М., 1958.
30. Тринчер К. С. Биология и информация. М., 1965.
31. Математическая теория оптимальных процессов. М., 1969.
32. Фан Лянъ-цэнъ, Вань Чу-сен. Дискретный принцип максимума. Оптимизация многоступенчатых процессов. М., 1967.
33.Суходольский Г. В. Основы математической статистики для психологов. Л., 1972.
34. Утюжников М. Д. К проблеме количественной оценки личных и деловых качеств руководителей производства. М., 1970.
35. Cattel R. B. The scientific analysis of personality. Chicago, 1966.
36. Cattel R. B. Handbook for sixteen personality factor qyestionnaire. N.-Y., 1970.
37. Попова T. C., Могилянская З. В. Техника изучения движений. М.-Л., 1934.
38. Ахутин В. М., Нафтульев А. И. Математическое моделирование деятельности человека-оператора при разработке эргатических систем//Человек и общество. Л., 1972. Вып. XI.
39. Бике Дж. А. Человек-оператор в системах управления//Современная теория систем управления М., 1970.
40. Таран В. А., Кофанов Ю. Н. К вопросу об определении передаточной функции человека-оператора с помощью аналоговой машины//Вопросы психологии. 1969. № 3.
41. Hollister W. M. An analytic measure for the difficulty of human control//J. Inst. Navig. 1967. Vol. 20. No 2.
42. Кулик B. T. Алгоритмизация объектов управления. Справочник. Киев, 1968.
43. Ордынцев В. М. Математическое описание объектов автоматизации. М., 1965.
44. Суходольский Г. В. Абстрактная модель деятельности специалиста и ее реализации//Вестн. Ленингр. ун-та. 1972. № 11.
45. Зараковский Г. М. Психофизиологический анализ трудовой деятельности. М., 1966.
46. Суходольский Г. В. Построение структурных моделей деятельности путем априорной алгоритмизации//Экспериментальная и прикладная психология. Л.. 1974. Вып. 6.
47. Гнеденко Б. В., Беляев Ю. К., Соловьев А. Д Математические методы в теории надежности. М., 1965.
48. Методические рекомендации по оценке надежности и эффективности систем "человек - техника". Л., 1971.
49. Половко А. М. Основы теории надежности. М., 1964.
50. Никифоров Г. С. О двух принципиальных подходах к проблеме надежности человека-оператора//Материалы III Всесоюзного съезда Общества психологов. М., 1968.
51. Небылицын В. Д. Основные свойства нервной системы человека. М., 1966.
52. Фокин Ю. Г. Надежность при эксплуатации технических средств. М., 1970.
53. Надежность комплексных систем "человек - техника". Материалы ко 2-му Всесоюзному симпозиуму по надежности комплексных систем "человек - техника". Л., 1969. Ч. 2.
54. Надежность комплексных систем "человек - техника". Материалы ко 2-му Всесоюзному симпозиуму по надежности комплексных систем "человек - техника". Л., 1970. Ч. 3.
55. Вентцель Е. С. Теория вероятностей. М., 1969.
56. Проблема надежности в военно-инженерной психологии//Военная инженерная психология. М., 1970.
57. Ломов Б. Ф., Прохоров А.И. К вопросу о контроле за состоянием человека- оператора//Вопросы бионики. М., 1967.
58. Никифоров Г. С. Самоконтроль как метод повышения надежности деятельности оператора//Надежность комплексных систем "человек - техника". Л., 1969. Ч. I.
59. Медведев В. И. Функциональные состояния оператора//Эргономика. М., 1970. Вып. 1.
60. Марищук В. Л., Бондарев Э. В., Егоров В. А. Вопросы психологической подготовки летного состава//Материалы конференции по психологической подготовке в войсках. Л., 1971.
61. Платонов К. К. Вопросы психологии труда. М., 1970.
62. Демидов В. И. Методологическое значение категории "состояния"//Категории диалектики и методология современной науки. Воронеж, 1970.
63. Зациорский З. М., Запорожанов В. А., Тер-Ованесян И. А. Вопросы теории и практики педагогического контроля в современном спорте//Теория и практика физической культуры. 1971. № 4.
64. Левитов Н. Д. О психических состояниях человека. М., 1964.
65. Марищук В. Л., Платонов К. К., Плетницкий Е. А. Напряженность в полете. М., 1969.
66. Селье Г. Очерки об адаптационном синдроме. М., 1960.
67. Гиляровский В. А. Старые и новые пробелмы психиатрии. М., 1946.
68. Киколов А. И. Умственно-эмоциональное напряжение за пультом управления. М., 1967.
69. Марищук В. Л. К вопросу об экстремальных факторах и "стрессе"//Материалы научной конференции, посвященной 50-летию Вооруженных Сил СССР и факультета ГДОИФК им. П.Ф. Лесгафта. Л., 1968.
70. К вопросу об устойчивости некоторых психических и психомоторных функций в экстремальных условиях//Надежность комплексных систем "человек - техника". Л., 1969. Ч. 1. С. 30-32.
71. Леман Г. Практическая физиология труда. М., 1967.
72. Вайнштейн Х. И. Утомление. Челябинск, 1967.
73. Виноградов М. И. Физиология трудовых процессов. М., 1966.
74. Розенблат В. В. Проблемы утомления. М., 1961.
75. Комендантов Г. Л. Утомление. М., 1968.
76. Овчинникова О. В. Эмоциональное состояние и работоспособность//Эргономика. М., 1970. Вып. 1.
77. Рубинштейн С. Я. Экспериментальные методики патопсихологии и опыт применения их в клинике. М., 1970.
78. Физиологические методы в клинической практике. Л., 1959.
79. Володарская М. И. О содержании понятия "стресс"//Учен. зап. Обл. пед. ин-та им. Н.К. Крупской. Т. 276. Вып. 17. Ч. 1. М., 1970.
80. Космолинский Ф. И Структурно-системный подход к изучению эмоций человека в экстремальных условиях//Авиационная и космическая медицина, Труды III Всесоюзной конференции по авиационной и космической медицине. М., 1969. Т. 1. С. 315-319.
81. Лазарус Р. Теория стресса и психофизиологические исследования//Эмоциональный стресс. Л., 1970. 178-208.
82. Solomon D. (ed.). Sensory deprivation. Cambridge, 1961.
83. Сергеев А. А. Физиологические механизмы действия ускорений. Л., 1967.
84. Adoleson J. Human performance and behaviour in hyperbaric environments. Stockholm, 1967.
85. Egbert R. L. Fighter I: An analysis of combat fighters and nonfighters//Hum. Res. Center, Ohaio, 1957. No 44.
86. Хилова Г. Н. Устойчивость кратковременной и оперативной памяти в некоторых экстремальных условиях//Вопросы психологии. 1970. № 5.
87. Berkun М. М., Bialek И. М. Experimental studies of psychological stress in man//Psychological monographs. 1962. Vol. 76. No 15.
88. Keys A. The biology of human starvation. Minnesota, 1950.
89. Simons D. Q., Flinn D. E., Hartman B. Psychophysiology of high altityde experience//Unusual environments and human behaviour. N.-Y., 1963.
90. Егоров B. A., Зазулина П. Л. О психофизиологических возможностях операторов старших возрастов//Материалы IV Всесоюзного съезда Общества психологов. Тбилиси, 1971.
91. Lee D.H.K. Human adaptation to arid environments//Desert biology. N.-Y., 1968. Vol. 1.
92. Налимов B. B., Чернова H. A. Статистические методы планирования экстремальных экспериментов. М., 1965.
93. Davis D. R. Pilot error. Air Ministry Publication, AP, 3139 A.L., HMSO, 1948.
94. Исследование личности в клинике и в экстремальных условиях//Труды ЛНИПИ им. Бехтерева, 1969. Т. 50.
95. Мильман В. Э. О некоторых методах изучения индивидуально-психологических различий, влияющих на поведение в стрессовой ситуации//Вопросы психологии. 1968. № 2.
96. Mefferd R. B. Stress responses as criteria for personal selection. Base-line study//Aerospace medicine. 1971. Vol. 42. No 1.
97. Zuckerman M. Development of a sensation seeking seals//J. Consult. Psychol. 1964. Vol. 28.
98. Doll R. E., Gunderson E. E. Group size, occupational status and psychological symp-tomatology in an extreme environments//J. Clin. Psychol. 1971. Vol. 27. No 2.
99. Radloff R., Helmreick R. Groups under stress. Psychological research in SEALAB II. N.-Y., 1968.
100. Wilson O. Human adaptation to life in Antarctica//Biogeography and ecology in Antarctica. The Hague, 1965.
101. Hebb D. O. Drives and CNS//Psychol. Revs. 1955. Vol. 62. No 4.
102. Helson H. Adaptation level theory//Psychology: A study of a science. N.-Y., 1959.Vol. 1.
103. Fitts P. M., Posner M.I. Human performance. Belmont, California, 1968.
104. Томашевский Т. Человек в системе труда//Эргономика. М., 1971.
105. Карцев И. Д., Халдеева Л. Ф., Павлович К. Э. Физиологические критерии профессиональной пригодности подростков к различным профессиям. М., 1968.
106. Саймон Б. Английская школа и индивидуальные тесты. М., 1958.
107. Марищук В. Л. О преодолении излишнего эмоционального напряжения средствами специальной физической тренировки//Труды КВФФК и С при ГДОИФК им. П. Ф. Лесгафта, 1961. Вып. XXIX.
108. Климов Е. А. Индивидуальный стиль деятельности. Казань, 1969.
109. Джамгаров Т. Т., Марищук В. Л. Отбор курсантов в летные училища методом комплексного изучения двигательных и психологических качеств//Вопросы научного обоснования физической подготовки в ВС СССР. Л., 1964.
110. Гуревич К. М. Профессиональная пригодность и основные свойства нервной системы. М., 1970.
111. Анализ деятельности человека-оператора//Инженерная психология. М., 1964. С. 120-137.
112. Платонов К. К. Психология летного труда//Психологическая наука в СССР. М., 1960. Т. 2.
113. Психологические методы исследования в клинике. Л., 1967.
114. Савищев В. И., Марищук В. Л., Хилова Г.Н. Исследование некоторых характерологических особенностей методов опросника "ЧХТ"//Социально-психипогические и лингвистические характеристики форм общения и развития контактов между людьми. Л., 1970.
115. Юнсон М. Толерантность к психологическому стрессу и экспериментальное измерение защитных механизмов//Эмоциональный стресс/Ред. Л. Леви. Л., 1970.
116. Наенко Н. И., Овчинникова О. В. Способы оценки показателей состояния напряженности в работе человека-оператора//Проблемы инженерной психологии. М., 1967.
117. Бодров В. А., Марищук В. Л. Психофизиологический отбор и подготовка специлистов операторского профиля//Вторая Всесоюзная конференция по инженерной психологии. Расширенные тезисы. Л., 1968.
118. Военная инженерная психология. М., 1970.
119. Джамгаров Т. Т. К проблеме отбора и тренировки лиц для обучения летному делу//Авиационная и космическая медицина. М., 1963.
120. Психологический отбор летчиков. Киев. 1966.
121. Современная буржуазная военная психология. М., 1964.
122. Mede W. Experimental Massenpsychologic. Leipzig, 1920.
123. Allport F. Social psychology. N.-Y., 1924.
124. Мюнстерберг Г. Основы психотехники. М., 1925. Ч. 2. Вып. 3.
125. Бехтерев В. М., Ланге М. В. Влияние коллектива на личность//Педология и воспитание. М., 1928.
126. Смирнов В. Е. Психология юношеского возраста. М.-Л., 1929.
127. Беляев Б. В. Проблема коллектива и его экспериментально-психологического изучения//Психология. М., 1930. Т. 111. Вып. 3.
128. Инженерная психология. М., 1964.
129. Новиков М. А. Принципы и методы группового отбора//Материалы III Всесоюзного съезда Общества психологов. М., 1968. Т. III. Вып. 1.
130. Горбов Ф. Д. Индивидуальное в групповом и групповое в индивидуальном в экспериментальном и клиническом аспектах//Тезисы сообщений XVIII Международного психологического конгресса. М., 1966. Т. III.
131. Назаров А. Н. Опыт исследования координации группового управления. М., 1970.
132. Обозов Н. Н., Овчинников B.C. Установка для исследования сенсомоторной совместимости//Научно-теоретическая конференция "Электроника и спорт". Л., 1968.
133. Обозов Н. Н. К вопросу оптимальной совместимости психомоторных функций в групповой деятельности//Человек и общество. Л., 1969. Вып. V.
134. Vorwerg М. SoziaJ-psychologisches training. Jena, 1971.
135. Asch S. E. Effects of group pressure upon the modification and distortion of judg-ments//Group dynamics research and theory. N.-Y., 1956.
136. Bovard E. W. Group structure and perception//J. Abn. Soc. Psychol. 1951. Vol. 46.
137. Sherif M. A study of some social factors in perception//Arch. Spychol. 1935. No 2.
138. Sodni P. E. Sozialpsychologie//Lerbuch der experimentellen Psychologic. Bern - Stutgard, 1963.
139. Антипина Г. С. Изучение малых групп в социологии и социальной психологии. Учебное пособие по отделению социологии и социальной психологии. Л., 1967.
140. Обозов Н. Н. Сравнительный анализ характеристик психомоторики по данным индивидуального и группового экспериментов//Учен. зап. Ленингр. ун-та, 1970. № 352. Вып. 2.
141. Обозов Н. Н. Эффективность групповой деятельности в связи с некоторыми социально-психологическими характеристиками членов малой группы//Человек и общество. Л., 1971. Вып. IX. С. 179-183.
142. Голубева Н. В., Иванюк М. И. Различия в коммуникативном поведении при решении групповых задач//Человек и общество. Л., 1966. Вып. I.
143. Волков И. П. Социометрические методы в социально-психологических исследованиях. Учеб. пособие. Л., 1970.
144. Ильина А. И. Особенности проявлений общительности в связи с подвижностью нервных процессов//Учен. зап. Пермского пед. ин-та, 1958. Вып. 23.
145. Ильина А. И. О сопоставимости динамических качеств общительности с временными характеристиками темперамента//Вопросы психологаи. 1967. № 4.
146. Карева М. А. Временные зоны пониженной помехоустойчивости в словесноассоциативных реакциях//Материалы III Всесоюзного съезда Общества психологов. М., 1968. Вып. 1. Т. III.
147. Лущихина И. М. К разработке речевых коммуникационных методик при разных условиях совместной работы//Социально-психологические и лингвистические характеристики форм общения и развития контактов между людьми. Л., 1970.
148. Обозов Н. Н. К вопросу о возможности прогнозирования результатов совместной деятельности по данным индивидуальных характеристик психомоторики//Теоретическая и прикладная психология в Ленинградском университете. Л., 1969. С. 93-95.
149. Обозов Н. Н. О проявлении некоторых индивидуальных и личностных особенностей взрослых людей в условиях индивидуальной и групповой работы//Возрастная психология взрослых. Л., 1971. Вып. 4.
150. Леонов А. А., Лебедев В. И. Психологические особенности деятельности космонавтов. М., 1971.
151. Леонтьев А. Н. Обучение как проблема психологии//Вопросы психологии. 1957. №1.
152. Леонтьев А. Н., Гальперин П. Я. Теория усвоения знаний и программированное обучение//Советская педагогика. 1964. № 10.
153. Ланда Л. Н. Алгоритмизация в обучении. М., 1966.
154. Гальперин П. Я. К учению об интериоризации//Вопросы психологии. 1966. №6.
155. Гальперин П. Я. Управление процессом учения//Новые исследования в педагогических науках. М., 1965. Вып. 4.
156. Столаров Л. М. Обучение с помощью машин. М., 1965.
157. Ричмонд У. К. Учителя и машины. М., 1968.
158. Аткинсон Р., Бауэр Г., Кортерс Э. Введение в математическую теорию обучения. М., 1969.
159. Венгер Л. А. Восприятие и обучение. М., 1969.
160. Талызина Н. Ф. Теоретические проблемы программированного обучения. М., 1969.
161. Платонов К. К., Шварц М. М. Очерки психологии для летчиков. М., 1948.
162. Дымерский В. Я. О применении воображаемых действий в процессе восстановления и сохранения навыков//Вопросы психологии. 1955. № 6.
163. Чебышева В. В. Совмещение действий при обучении сложному двигательному навыку//Известия АПН РСФСР. 1958. Вып. 91.
164. Платонов К. К. Психологические вопросы теории тренажеров//Вопросы психологии. 1961. № 4.
165. Эдельман Л. М. Опыт проведения исследовательских противоаварийных тренировок с персоналом, обслуживающим энергоустановки, станции и подстанции энергосистем//Вопросы профессиональной пригодности оперативного персонала энергосистем. М., 1966.
166. Бичаев Б. П., Рожанская И. Д. Формирование поведения оператора в системе "человек-машина"//Проблемы инженерной психологии. М., 1968. Вып. 3. Ч. 2.
167. Ралль В. Ю., Макарьев О. Л., Поляков B.C. Тренажеры и имитаторы ВМФ М., 1969.
168. Уолфл Д. Тренировка//Экспериментальная психология/Ред. С.С. Стивенс. М.,1963. Т. II. С. 917-940.
169. Рубинштейн С. Л. Основы общей психологии. М., 1946.
170. Гальперин П. Я. Развитие исследований по формированию умственных действий//Психологическая наука в СССР. М., 1959. Т. 1.
171. Самарин Ю. А. Очерки психологии ума. М., 1962.
172. Середа Г. К. Проблема памяти и обучения//Вопросы психологии. 1967. № 1.
173. Кожин A. М., Цукерман Б. Г., Пахомов А. Ф. О формировании навыка читаемости шкал контрольно-измерительных приборов//Доклады АПН РСФСР. 1961. N- 3.
174. Ананьев Б. Г. Структура развития психофизиологических функций взрослого человека//Возрастная психология взрослых. Л., 1971. Вып. 1.
175. Степанова Е. И. Возрастная изменчивость мыслительных функций в периоды зрелости//Возрастная психология взрослых. Л., 1971. Вып. 1.
176. Петров Я. И., Степанова Е. И. О некоторых соотношениях развития памяти и мышления в периоды зрелости//Возрастная психология взрослых. Л., 1971. Вып. 1.
177. Рожанская И. Д. К проблеме формирования деятельности операторов в системах управления//Материалы III Всесоюзного съезда Общества психологов. М., 1968. Т. III. Вып. 1.
178. Knowles W. B. Operator-loading tasks//Human Factor. 1963. Vol. IV-V. No 2.
179. Ительсон Л. E. Математические и кибернетические методы в педагогике. М., 1964.
180. Платонов К. К., Голубев Г. Г. Роль тренажеров в формировании производственного мастерства//V Всесоюзная конференция по применению технических средств и программированному обучению. Симпозиум 11. М., 1969.
Методология исследований по инженерной психологии и психологии труда. Л., 1974. Ч. 1. С. 18-80.
О потере информации при описании деятельности человека-оператора передаточной функцией (Ю. М. Забродин, А. П. Чернышев)
Возрастание числа полуавтоматических систем в мире за последние годы показывает, что на современном этапе технического прогресса они стали доминирующими [6] . Причины этого, на наш взгляд, заключаются в следующем: во-первых, ограниченность возможностей автоматических систем относительно эффективности их применения; во-вторых, резкое увеличение стоимости и сложности создаваемых систем с повышением уровня автоматизации.
Все полуавтоматические системы относятся к классу систем "человек - машина", поэтому инженерно-психологические исследования взаимодействия человека с техническими средствами в настоящее время приобретают решающее значение для их проектирования и эксплуатации.
В связи с научно-техническим прогрессом произошли существенные изменения требований к психической деятельности человека, все чаще стали возникать ситуации, в которых человек-оператор оказывается на пределе своих возможностей. В этих случаях человеческий фактор ограничивает работу всей системы.
В настоящее время существует разрыв между подходами к описанию психофизиологических характеристик человека и характеристик машины, обусловленный спецификой методов исследования в психологии, с одной стороны, и технике - с другой. Этот разрыв обусловлен исторически сложившимися традициями в теории и практике проектирования техники и в исследовании деятельности человека.
Создание единой системы "человек - машина" требует единого подхода ко всей системе в целом и единого языка для ее описания. Тем не менее до настоящего времени расчету и проектированию подвергается только одна подсистема - объект управления. Одной из основных причин такого положения дел является отсутствие принципа построения модели деятельности человека-оператора.
Для учета человеческого (прежде всего психологического) фактора особенно важно разработать такие подходы, которые позволили бы описывать деятельность человека так. чтобы из этих описаний легко было извлекать информацию для решения технических задач и вместе с тем по оценкам, принятым в технике, видеть психологический смысл тех или иных проявлений деятельности человека-оператора.
Попытки создания единого описания функционирования технической части системы и деятельности человека-оператора в инженерной психологии получили свое наибольшее развитие при анализе деятельности оператора в режиме слежения. При этом в качестве основного метода использовались математические модели деятельности, заимствованные из аппарата теории автоматического регулирования (главным образом передаточные функции). Первые передаточные функции, описывающие деятельность оператора в режиме слежения, появились в США в начале 50-х годов. Это были модели Мак-Руэра, Крендела, Элкинда и др. [3; 15; 16]. В дальнейшем к созданию моделей деятельности был привлечен аппарат нелинейной теории автоматического управления. Это - модель Диамантидеса [17]. Были созданы нестационарные и изменяемые во времени модели деятельности [14]. Подобные модели были созданы и у нас в стране [9; 10]. Всего же математических моделей деятельности в режиме слежения было создано более тридцати [8].
В подавляющем большинстве случаев при создании математических моделей использовался механоцентрический подход бихевиористского толка, который состоял в том, что человек-оператор представлялся как простое звено системы, а для описания его функционирования применялись методы, разработанные для анализа технических систем. Главная задача подобного анализа состояла в определении "выходных" реакций человека при известных "входных" сигналах, т. е. осуществлялся подход "стимул - реакция".
Построение математических моделей деятельности производилось в основном при помощи двух методов.
1. Метод эталонной модели. Этот метод состоит в том, что модель, сформированная в виде аналоговой схемы, подключалась в рабочий контур параллельно с человеком-оператором. Действие человека сравнивалось с выходным сигналом модели по какому-либо заранее выбранному критерию (чаще всего использовался критерий среднеквадратической ошибки).
При этом параметры модели подстраивались таким образом, чтобы минимизировался выбранный критерий сравнения.
Метод эталонной модели позволяет лишь идентифицировать действия человека-оператора, но не дает возможности раскрыть их психологические характеристики. Такие модели могут быть полезными и необходимыми лишь в случае, когда человека в системе нужно заменить автоматом.
2. Метод спектрального анализа. При помощи этого метода, привлеченного из аппарата теории автоматического управления, исследовался спектральный состав ответных действий оператора. По виду спектрального состава выходного и входного сигналов приближенно определялся вид звена, осуществляющего подобное преобразование. При этом класс создаваемых моделей деятельности ограничивался квазилинейными моделями. Эти модели также не дают подхода к изучению особенностей действий человека (их структуры и механизмов психической регуляции).
Независимо от способа получения большинство из созданных математических моделей не нашли практического применения.
111 Эти модели деятельности не отражали таких важных особенностей, как зависимость ответной реакции от вида и значимости входного сигнала, адаптационные возможности оператора, его утомляемость, зависимость реакций от условий деятельности, от уровня мотивации, от функционального состояния и т. д. Главное, они игнорируют тот факт, что действия оператора опосредствуются психическим отражением: концептуальными моделями, оперативными образами объекта управления. Получилось, что человек-оператор был поставлен на один уровень исследования с объектом управления, несмотря на его специфические качества. В построении этих моделей нарушается главный принцип советской инженерной психологии, который гласит, что в системах управления отношение человека и машины является отношением "субъекта труда и орудия труда" [4].
Как уже было сказано, один из распространенных подходов к моделированию функциональных характеристик деятельности человека заключается в формальном переносе понятия передаточной функции на описание деятельности оператора. Действительно, в практике проектирования систем управления передаточная функция является наиболее удобным видом описания динамики их функционирования. Эта достаточно простая идея привлекла внимание многих исследователей, занимающихся вопросами моделирования деятельности человека-оператора [3; 9; 10; 14]. Однако следует сказать, что в психологической литературе термин "передаточная функция человека" употребляется не вполне корректно. Представляется очевидным факт, что соответствующие соотношения не справедливы для разомкнутых и замкнутых систем с наличием в них человека-оператора. Кроме того, описав математической моделью деятельность человека-оператора в одной ситуации, практически никогда нельзя перенести ее на другую ситуацию. Передаточная функция объекта, будучи однажды вычисленной, остается неизменной для любых воздействий и не зависит от типа и места включения в систему. Поэтому представляет интерес вопрос о правомочности переноса понятия передаточной функции системы на описание деятельности человека-оператора:
Что такое передаточная функция? Для какого класса систем это понятие справедливо? Можно ли это понятие перенести на описание деятельности человека в системе? И если можно, то где границы применимости этого понятия для деятельности человека?
В теории автоматического управления понятие передаточной функции введено для линейных систем. Под линейной системой понимают систему, для которой справедлив принцип суперпозиции. Этот принцип заключается в следующем: если к линейной системе приложено одновременно несколько возмущающих воздействий, то их совместный эффект равен сумме эффектов, вызванных каждым воздействием в отдельности.
Принцип суперпозиции дает возможность представить реакцию линейной системы на произвольное возмущение в виде суммы реакций этой системы на элементарные возмущения. Для этого достаточно разложить произвольное возмущение по элементарным возмущениям выбранного типа. Тогда, зная реакцию линейной системы на элементарные возмущения этого типа, мы можем при помощи принципа суперпозиции определить ее реакцию на произвольное возмущение. Вследствие этого динамические свойства линейной системы можно полностью охарактеризовать ее реакцией на какой-нибудь стандартный тип возмущения, с помощью которого можно представить возмущение произвольного вида. Принципиально можно выбрать любой вид элементарного возмущения и в соответствии с ним определить характеристику линейной системы.
В зависимости от выбора стандартного типа возмущения мы получим разные характеристики линейной системы. Но каждая такая характеристика будет исчерпывающей, так как знание ее достаточно для нахождения реакции линейной системы на любое возмущение. Все эти характеристики взаимосвязаны и могут быть получены одна из другой. Они зависят только от собственных динамических свойств системы и не зависят от параметров воздействия. Передаточная функция определяется как отношение выхода системы, преобразованного по Лапласу, ко входу системы, преобразованному по Лапласу, при нулевых начальных условиях.
Это определение часто используется в психологической литературе без учета класса системы, что приводит к ошибочному толкованию передаточной функции.
Рассмотрим возможность построения функции, отображающей деятельность оператора. Ограничимся моделированием простой сенсомоторной деятельности и не будем касаться более сложных случаев. Такой деятельностью может быть компенсаторное слежение в одной плоскости за гармоническим сигналом.
Сущность эксперимента состояла в следующем. С низкочастотного генератора периодических колебаний подавали гармонический сигнал, оператор его отслеживал с помощью потенциометрической ручки управления. Образующаяся при этом ошибка слежения поступала на индикатор. Для формализованного описания деятельности необходимо рассмотреть внешнее воздействие на человека-оператора и его ответную реакцию. Частота предъявляемого сигнала в каждом конкретном эксперименте была фиксированной. Эксперимент проводился на частотах от 0,05 Гц до срыва слежения1 операторами. При обработке эксперимента определялись статистические характеристики ошибки.