

Нахождение аналитического выражения для спектральной плотности стационарного случайного процессаg (t).
Если известно аналитическое выражение корреляционной функции стационарного случайного процесса, то его спектральную плотность можно получить, произведя преобразование Фурье над корреляционной функцией.
![]()
Для случайного процесса, корреляционная функция которого имеет вид (6) спектральная плотность равна :
![]() .
.
Преобразуем выражение следуюшим образом:
![]()
![]() =
=
=![]() .
.
Определение по заданной структурной схеме системы автоматического управления передаточных функций замкнутой системы, связываюшее ошибку системы с полезным сигналом и с помехой, приложенной к входу системы.
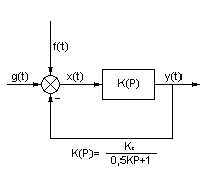
Рис.3 Структурная схема системы
Отношение
![]() - называется передаточной функцией
системы. Из выражения
- называется передаточной функцией
системы. Из выражения![]() ,
следует, что
,
следует, что
 .
.
В
передаточной функции Р =![]() - оператор преобразования Лапласа, во
втором случае Р – оператор дифференцирования.
- оператор преобразования Лапласа, во
втором случае Р – оператор дифференцирования.
При подстановке в передаточную функцию, представляющую собой отношение изображение Фурье выходного сигнала к изображению Фурье входного сигнала системы:
 ,
(7)
,
(7)
где
![]() ,
,![]() .
.
Из
(7) следует:![]() .
.
Передаточная функция разомкнутой системы (см. рис.2) равна К (Р).
На входе системы действуют случайные не коррелированные между собой сигналы :
полезный сигнал g(t) (этот сигнал система должна воспроизвести без искажений на выходе) и случайная помеха f(t) (которая тоже попадает на выход системы и искажает выходной сигнал).
x(t) – ошибка системы;
y(t) – выходной сигнал;
Передаточная функция замкнутой системы, связывающая ошибку системы с полезным сигналом, имеет вид:
![]()
Ф(Р)=
Передаточная функция замкнутой системы, связывающая ошибку системы с помехой, имеет вид:
![]()
W(P)=![]()
W(P)=
Определение оптимального значения коэффициента усиления системы Кс , соответствующего минимуму дисперсии ошибки системы.
При действии на входе системы полезного сигнала g(t) и помехиf(t) ошибка системы определяется формулой:
![]() (8)
(8)
Для определения дисперсии ошибки воспользуемся формулой
![]() ,
,
где
![]()
![]() .
(9)
.
(9)
При отсутствии корреляции между полезным сигналом и помехой спектральная плотность ошибки системы может быть подсчитана по формуле:
![]()
![]()

![]()
![]() .=
.=
=![]()

![]()
![]()
![]()
![]()
=![]()
=![]()
=![]()
![]()

![]()
![]() .
.
![]() ,
,
Интегралы
![]() для различных значенийn(степень полиномаA(j
для различных значенийn(степень полиномаA(j![]() ))
приведены в справочниках и учебниках
по теории автоматического управления.
))
приведены в справочниках и учебниках
по теории автоматического управления.
![]()
где
![]() ,
,
![]() .
.
![]() .
.
Записываем коэффициенты для первого слагаемого :
![]() 0,615
0,615
![]() 0,0404
0,0404
![]() 1,057+
1,057+![]()
![]() - 0,108
- 0,108
![]() 0,109+0,093
0,109+0,093![]()
![]() 0,00286
0,00286
![]() 0,0268+0,0268
0,0268+0,0268![]()
![]() .=
.=


![]() .
.
Записываем коэффициенты для второго слагаемого :
![]() 0,615
0,615
![]()
![]() 1,0378+
1,0378+![]()
![]()
![]() 0,0615+0,0615
0,0615+0,0615![]()
![]()

![]()
Для определения дисперсии ошибки следует воспользоваться выражением :
![]() ,
где вместо
,
где вместо
![]() и
и![]() следует
подставить математические ожидания
случайных процессовg(t)
и f(t),
а в передаточные функции вместо Р
подставить 0
следует
подставить математические ожидания
случайных процессовg(t)
и f(t),
а в передаточные функции вместо Р
подставить 0
![]()
![]() .
.
Математическое ожидание случайного сигнала g(t) можно рассчитать по формуле:
![]()
П![]() рограмма
для расчета
рограмма
для расчета
![]() на языке PASCAL
приведена в приложении3.
на языке PASCAL
приведена в приложении3.
![]() =0,187
=0,187
![]() =0
=0
![]() 0,187
0,187![]()
![]()
Найдем дисперсию ошибки:
![]()
![]()
![]() =
= + +
+ +
![]()
При
расчете системы на минимум дисперсии
ошибки следует искать такое значение
варьируемого параметра, при котором
![]()
График
функции
![]() (при
(при![]() >0
,
>0
,![]() >0)
показан на рисунке 4.
>0)
показан на рисунке 4.
При К =7 дисперсия минимальна и равна 0,01.
![]()
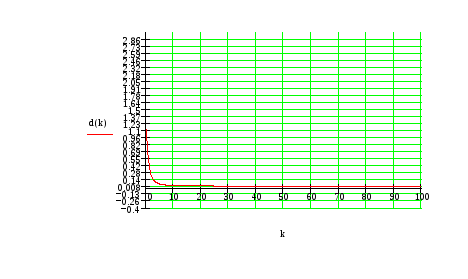
Рис.4
Выводы :
В результате выполнения данной работы, мною были усвоены методы определения основных вероятностных характеристик стационарного случайного процесса, а также были приобретены практические навыки расчета стационарных линейных систем автоматического управления, работающих при случайных входных сигналах.
.