

Задание 4. Анализ результатов построенной математической модели
4.1. Определение наблюдательности и управляемости объекта
cu1=ctrb(A1,B1)
cu1 =
Columns 1 through 8
0 0 0 0.0410 0.2268 0.0000 0.0472 0.0708
0.2268 0.0000 0.0472 0.0417 -0.1911 -0.0288 -0.0388 0.0086
-0.1911 -0.0288 -0.0388 0 0 0 0 0
Columns 9 through 12
-0.0301 -0.0288 -0.0053 0.0588
0.0474 0.0000 0.0099 0.0148
0 0 0 0
upr1=rank(cu1)
upr1 = 3
ak1=rank(A1)
ak1 = 2
cu2=obsv(A1,C1)
cu2 =
1.0000 0 0
0.7099 1.0000 0
0.7129 0.7099 1.0000
nab1=rank(cu2)
nab1 = 3
Т.к. upr1 не равен nab1 и ak1, то объект неуправляемый и не наблюдаемый.
cu1=ctrb(A2,B2)
cu1 =
Columns 1 through 8
-0.3135 -0.4384 -0.0264 0.0725 0.1172 0.1373 -0.0454 -0.3154
1.0350 1.4208 0.0319 -0.5277 -0.4372 -0.3580 0.0721 0.8865
-0.9390 -1.0598 0.0298 1.0026 0.5494 0.1133 0.0341 -0.6220
-0.3717 -1.1748 -0.0435 -0.4089 -0.1407 0.4189 -0.0979 -0.4135
0.9954 2.0077 -0.0021 -0.6763 -0.2487 -0.3584 0.0198 0.7510
-0.3201 -0.4583 0.0137 0.7675 0.1980 -0.0578 0.0300 -0.3273
-0.1973 -0.6106 -0.0033 -0.2359 -0.0286 0.1353 -0.0133 0.0361
0.1267 0.3525 -0.0002 0.0002 -0.0120 -0.0300 0.0002 0.0053
-0.0141 -0.0329 0.0001 0.0057 0.0024 -0.0010 0.0003 -0.0006
-0.0014 -0.0063 0.0000 0.0003 0.0002 0.0003 0.0000 -0.0000
>> upr1=rank(cu1)
upr1 = 8
ak1=rank(A2)
ak1 =10
cu2=obsv(A2,C2)
cu2 =
Columns 1 through 8
1.0000 0 0 0 0 0 0 0
2.9276 1.0000 0 0 0 0 0 0
6.9701 2.9276 1.0000 0 0 0 0 0
12.7809 6.9701 2.9276 1.0000 0 0 0 0
21.2817 12.7809 6.9701 2.9276 1.0000 0 0 0
31.7472 21.2817 12.7809 6.9701 2.9276 1.0000 0 0
44.6548 31.7472 21.2817 12.7809 6.9701 2.9276 1.0000 0
58.9152 44.6548 31.7472 21.2817 12.7809 6.9701 2.9276 1.0000
74.5873 58.9152 44.6548 31.7472 21.2817 12.7809 6.9701 2.9276
90.3578 74.5873 58.9152 44.6548 31.7472 21.2817 12.7809 6.9701
nab1=rank(cu2)
nab1 =10
Т.к. upr1 не равен ak1, а nab1= ak1 и, то объект неуправляемый и наблюдаемый.
4.2. Определение значений выхода и ошибки модели
e1=pe(z,th1)
e1 =0.0000
-0.0781
0.1632
0.8816
0.3781
-0.0241
0.1880
-1.4342
-0.3981
0.1787
-0.4620
0.9608
[ym1,fit1]=compare(z,th1)
ym1 = [60x1x0 iddata]
fit1 = 17.8913
e2=pe(z,th2)
e2 =
0.0007
0.0202
0.1495
0.0728
-0.7864
-0.6622
0.0645
0.0818
1.3347
-0.2330
-0.0435
2.3347
[ym1,fit1]=compare(z,th2)
ym1 = [60x1x0 iddata]
fit1 = -8.8126
plot(e2,'r') plot(e1,'g')
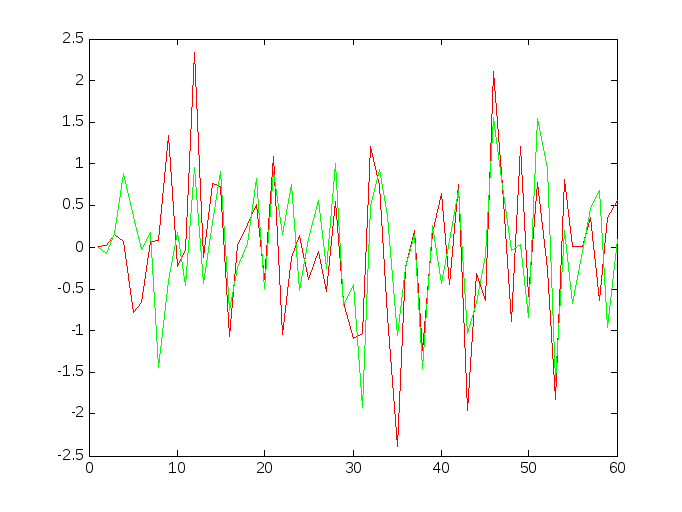
Рис. 21 – График выхода модели и стандартных отклонений
4.2. Построение графика выхода объекта и динамической модели
compare(z,th1)
compare(z,th2)

Рис. 22 – График выхода объекта и динамической ARMAX-модели
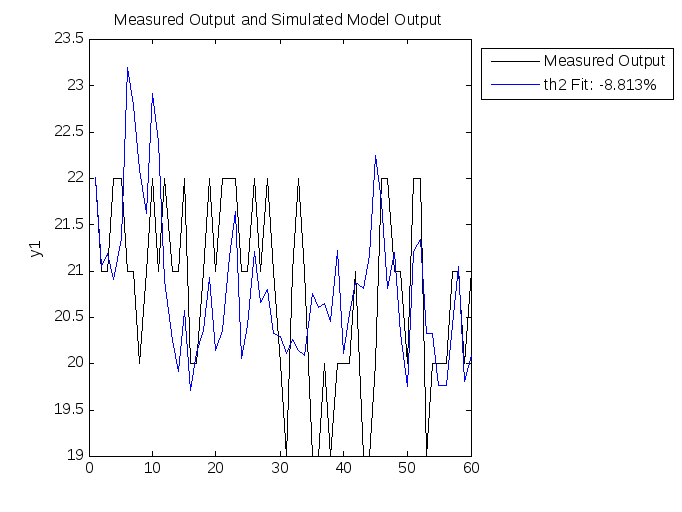
Рис. 23 – График выхода объекта и динамической BJ-модели
Выводы
В данной курсовой работе по заданным значениям технологического объекта (вариант №7) , были сделаны следующие вычисления:
– определил среднее, медиану, дисперсию, среднеквадратическое отклонение для всех входных и выходного параметров.
– построил графики и гистограммы каждой переменной.
– вычислил матрицу коэффициентов корреляции переменных.
Оценил стационарность данных по критерию серий Вальда-Вольфовица, и определил, что все входные и выходные параметры не стационарны.
Оценил нормальность закона распределения за критерием Колмогорова, определил, что все параметры распределены не по нормальному закону распределения.
Определил оптимальный шаг квантования и длину реализации экспериментальных данных. Время реализации 0,1с., шаг квантования 912.
Построил степенную регрессионную модель третьей степени для первого и третьего параметров на входе объекта. Она имеет вид

Невязка степенной регрессионной модели R = 48.3
Относительная ошибка P = 0.03
Степенная
регрессионная модель третьей степени
для первого и третьего параметров
помехоустойчивая, т.к. относительная
ошибка
 .
.
Мера обусловленности С = -43.6892
Матрица
хорошо обусловлена, т.к
 .
.
Определили меру адекватности модели SKO = 0.89 и построили график выходов статической модели и объекта.
Также определили корреляционные функции, импульсные, частотные и спектральные характеристики, построили их графики.
Построили ARMAX – модель и BJ – модель объекта в тета формате и определил модель в виде переменных состояния.
Исследовали ARMAX – модель и BJ – модель на наблюдаемость и управляемость
ARMAX-модель неуправляемая
ARMAX-модель ненаблюдаемая
BJ -модель неуправляемая
BJ -модель наблюдаемая
Для анализа результатов моделирования перевели полученные модели в модель в виде переменных состояния, определили выход модели и стандартные отклонения, а также построили графики выхода объекта и динамической модели.