

5.1.1 Математичні моделі цифрових автоматів
Ми вже розглядали закони функціонування, математичні моделі комбінаційних схем.
Розглянемо закон функціонування цифрових автоматів з погляду абстрактної теорії автоматів.
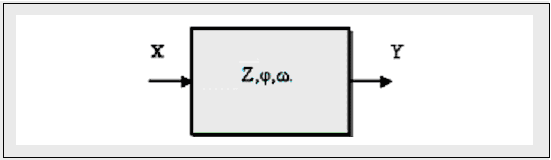
Рисунок 5.1 – Модель абстрактного цифрового автомата
Абстрактний автомат А − це узагальнене представлення опису функціонування моделі цифрової логічної системи у дискретному часі, яку визначають:
- множиною вхідних сигналів
![]() ;
;
- множиною вихідних сигналів
![]() ;
;
- множиною внутрішніх станів
![]() ,
включаючи й початковий, нульовий стан
z0;
,
включаючи й початковий, нульовий стан
z0;
- функцією переходів![]() відображення
множини вхідних сигналів
відображення
множини вхідних сигналів![]() на
множину внутрішніх станів
на
множину внутрішніх станів![]() ;
;
- функцією виходів відображення
множини вхідних сигналів
![]() і станів
і станів![]() на множину вихідних сигналів
на множину вихідних сигналів![]() .
.
Тоді, узагальнений закон або модель абстрактного автомата буде виглядати як математичний кортеж:
![]() .
.
Автомат
називають кінцевим, якщо кінцеві
множини![]() .
Абстрактний автомат реалізує
відображення множини слів вхідного
алфавітуXна множину слів вихідного
алфавітуY.
.
Абстрактний автомат реалізує
відображення множини слів вхідного
алфавітуXна множину слів вихідного
алфавітуY.
Узагальнений закон функціонування автомата не відтворює його поведінку в часі, а саме це питання є іноді основним при аналізі й синтезі цифрових систем. Серед багатьох спроб дати математичний опис поведінки автомата в часі, найбільше поширення одержали автомати Мілі й Мура.
Закон функціонування автомата Мілі:
![]()
Наступний стан автомата
![]() залежить від функції переходів φ, стану
автомата на даний час z(t) і вхідних
сигналів у цей момент часу
залежить від функції переходів φ, стану
автомата на даний час z(t) і вхідних
сигналів у цей момент часу![]() .
Вихідні сигнали залежать від функції
виходів, вхідних
сигналів x(t) і внутрішнього стану автомата
.
Вихідні сигнали залежать від функції
виходів, вхідних
сигналів x(t) і внутрішнього стану автомата![]() ,
де
,
де![]() − автоматний, дискретний час визначений
тактовими імпульсами;z0 −
початковий, нульовий стан.
− автоматний, дискретний час визначений
тактовими імпульсами;z0 −
початковий, нульовий стан.
Закон функціонування автомата Мура:
![]()
Тобто, в автоматі Мура вихідні сигнали
![]() залежать
тільки від стану автомата в цей момент
і не залежать від вхідних сигналів.
залежать
тільки від стану автомата в цей момент
і не залежать від вхідних сигналів.
5.1.2 Табличний спосіб завдання ца
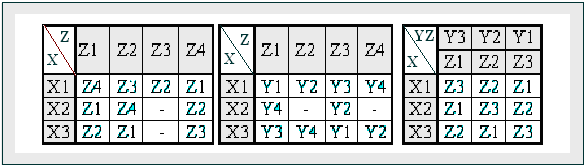
Існує кілька способів завдання опису функціонування ЦА. Для завдання простих ЦА набули значне поширення табличні способи опису його функціонування у вигляді представлених таблиць 4.1 а,б: переходів, виходів автомата Мілі (а) та відмічених таблиць переходів автомата Мура (б).
Таблиця 5.1 – Приклади таблиць переходів, виходів та таблиці відмічених станів автомата
Автомат
Мілі може не мати деяких станів і деяких
вихідних сигналів. Такі автомати
називаються частково повними. Якщо
автомат має тільки один стан, то він
називається тривіальним автоматом.
Абстрактний автомат завжди має вхідний
![]() і вихідний
і вихідний![]() інформаційні канали й у кожний момент
часу він перебуває в якомусь одному
певному стані
інформаційні канали й у кожний момент
часу він перебуває в якомусь одному
певному стані![]() .
Таблиця переходів надає опис переходу
автомата із стану
.
Таблиця переходів надає опис переходу
автомата із стану![]() у стан
у стан![]() ,
при умові надходження управління
,
при умові надходження управління![]() .
Таблиця виходів вказує, який вихід стане
при цьому активним. У відміченій таблиці
стан і вихід суміщаються (для ЦА Мура).
.
Таблиця виходів вказує, який вихід стане
при цьому активним. У відміченій таблиці
стан і вихід суміщаються (для ЦА Мура).
5.1.3 Канонічний метод синтезу ца
Теоретичним обґрунтуванням структурного синтезу автоматів є теорема про структурну повноту.
Усяка система елементарних автоматів, що містить автомат Мура з нетривіальною пам’яттю, що володіє повною системою переходів і повною системою виходів, і яку-небудь функціонально повну систему елементів логічних функцій, є структурно повною.
Канонічний метод структурного синтезу припускає подання структурної й логічної схеми автомата у вигляді двох частин рисунку 13.1: пам’яті й комбінаційної схеми.
Пам’ять автомата складається з елементарних, повних автоматів Мура П1,...,Пi…Пt.
Будь-який автомат Мура повинен мати повну систему переходів і повну систему виходів. Це означає, що для будь-якої пари станів автомата пам’яті знайдеться вхідний сигнал, що переключить його в інший стан. Повнота системи виходів автомата Мура полягає в тому, що кожному стану відповідає свій кодований сигнал на його виході. Інакше кажучи, у повному автоматі Мура його внутрішній стан ототожнюється з виходом, тобто, за його виходом можна визначити в якому стані він перебуває.
Загальна кількість елементів пам’яті
Мура
![]() в автоматі
в автоматі![]() визначається необхідною сукупністю
всіх його внутрішніх станів
визначається необхідною сукупністю
всіх його внутрішніх станів![]() ,
де 2 − основа бінарної системи числення.
Так, наприклад, автомат, який має п’ять
елементів пам’яті може мати 25станів. Коди внутрішніх станів автомата
(елементів пам’яті) визначаються
бінарним числом із 5-ти розрядів.
,
де 2 − основа бінарної системи числення.
Так, наприклад, автомат, який має п’ять
елементів пам’яті може мати 25станів. Коди внутрішніх станів автомата
(елементів пам’яті) визначаються
бінарним числом із 5-ти розрядів.
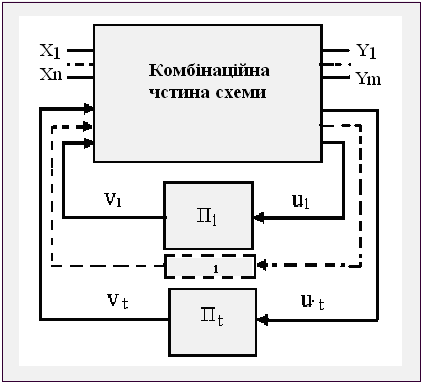
Рисунок 5.2 – Структура цифрового автомата Мілі
Так як, кожний стан автомата А визначається
кодом станів елементів Мура, то, щоб
перевести його, наприклад, зі стану![]() у стан
у стан![]() ,
необхідно переключити тригер третього
розряду з 1 в 0. Ці переключення відбуваються
під дією сигналів збудження
,
необхідно переключити тригер третього
розряду з 1 в 0. Ці переключення відбуваються
під дією сигналів збудження![]() ,
що надходять із комбінаційної частини
автомата.
,
що надходять із комбінаційної частини
автомата.
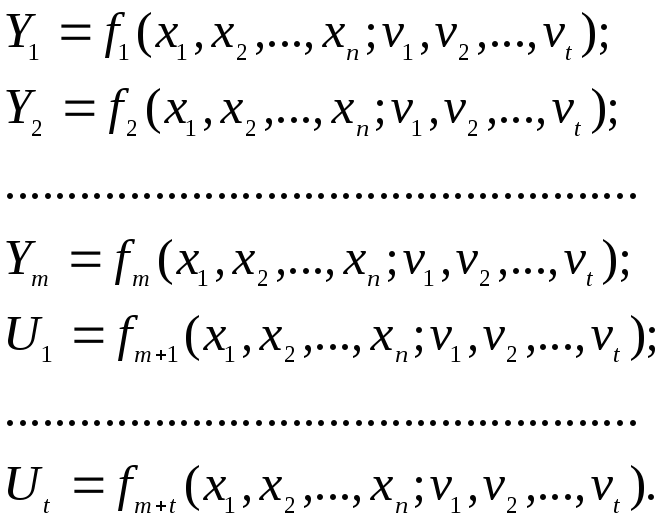
Результатом
канонічного методу структурного синтезу
є система логічних рівнянь
математичного опису автомата![]() .Ця модель відображає залежність вихідних
сигналів автомата, у тому числі й сигналів
переключення пам’яті, від сигналів
вхідних змінних, у тому числі й сигналів
із виходу елементів пам’яті.
.Ця модель відображає залежність вихідних
сигналів автомата, у тому числі й сигналів
переключення пам’яті, від сигналів
вхідних змінних, у тому числі й сигналів
із виходу елементів пам’яті.
Таким чином, при канонічному методі
синтез автомата зводиться до вибору
елементів пам’яті й побудови комбінаційної
частини схеми, входами якої є сигнали
вхідних змінних структурного автомата
![]() і сигнали оберненого зв’язку від
елементів пам’яті
і сигнали оберненого зв’язку від
елементів пам’яті![]() ,
a виходами − сигнали на вихідних каналах
,
a виходами − сигнали на вихідних каналах![]() і функцій переключення пам’яті
і функцій переключення пам’яті![]() .
Автомат А можна задати наступною
системою рівнянь:
.
Автомат А можна задати наступною
системою рівнянь:
Для набуття практичних навичок проектування цифрових автоматів, розглянемо приклад застосування канонічного методу структурного синтезу логічної схеми.