

-
Закон динаміки точки у неінерціальних системах відліку
Отже, всі існуючі системи відліку належать до неінерціальних, а ІСВ – абстракція наше завдання полягає в одержанні основного закону динаміки НІСВ у загальному випадку.
Як
показано на Мал.1.11.1, з центром мас Сонця
зв’яжемо інерціальну систему відліку
(система координат OXYZ), а
наявність у Землі багатьох прискорень
дозволяє зв’язати з нею неінерціальну
систему відліку найзагальнішого типу.
При цьому не виходитимемо за межі
класичної механіки, вважаючи однаковими
інтервали часу і відстані, а також сили
взаємодії тіл в обох системах відліку.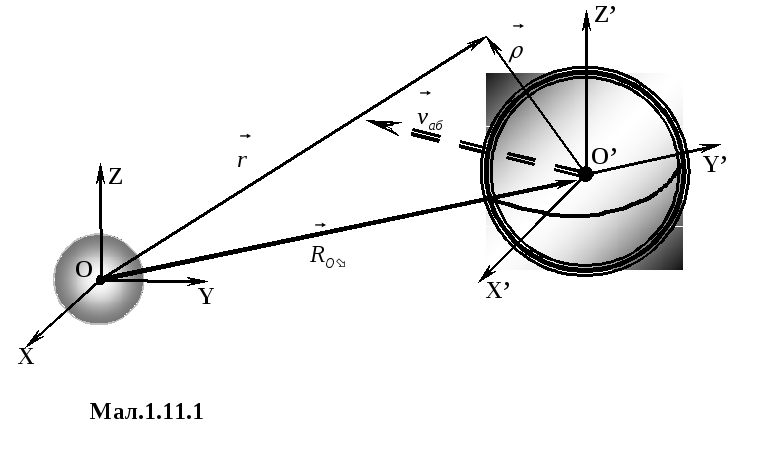
Рухома
неінерціальна система координат
![]() має початок відліку у центрі Землі, вісь
має початок відліку у центрі Землі, вісь
![]() напрямлена уздовж вектора миттєвої
кутової швидкості
напрямлена уздовж вектора миттєвої
кутової швидкості
![]() нашої планети, осі
нашої планети, осі
![]() і
і
![]() лежать у площині екватора (Мал.1.11.1). Ця
система координат жорстко зв’язана із
земною кулею, здійснюючи разом з нею
рух навколо Сонця. Власне і прецесійне
обертання тощо.
лежать у площині екватора (Мал.1.11.1). Ця
система координат жорстко зв’язана із
земною кулею, здійснюючи разом з нею
рух навколо Сонця. Власне і прецесійне
обертання тощо.
Матеріальна
точка масою
![]() рухається по поверхні Землі, а її
положення в НІСВ визначається змінним
вектором
рухається по поверхні Землі, а її
положення в НІСВ визначається змінним
вектором
![]() ,
проведеним у точку розташування
,
проведеним у точку розташування
![]() з центра планети. Положення
з центра планети. Положення
![]() у ІСВ визначається вектором
у ІСВ визначається вектором
![]() ,
а траєкторія руху може бути визначена
для конкретних початкових умов шляхом
інтегрування диференційного рівняння
другого закону Ньютона в інерціальній
системі відліку:
,
а траєкторія руху може бути визначена
для конкретних початкових умов шляхом
інтегрування диференційного рівняння
другого закону Ньютона в інерціальній
системі відліку:
|
|
(1.11.1) |
Де
![]() – прискорення точки
– прискорення точки
![]() відносно інерціальної системи відліку
(“абсолютне” прискорення
відносно інерціальної системи відліку
(“абсолютне” прискорення
![]() ;
;
![]() – сили взаємодії матеріальної точки
– сили взаємодії матеріальної точки
![]() з оточуючими тілами, зокрема,
з оточуючими тілами, зокрема,
![]() і
і
![]() – сили гравітаційного притягання до
Сонця і Землі,
– сили гравітаційного притягання до
Сонця і Землі,
![]() – сила опору середовища,
– сила опору середовища,
![]() – сила нормальної реакції опори тощо.
– сила нормальної реакції опори тощо.
Основний
закон динаміки точки в НІСВ одержимо з
рівняння (1.11.1) шляхом введення у нього
другої похідної по часу від відносного
радіуса-вектора
![]() .
З Мал.1.11.1 випливає, що
.
З Мал.1.11.1 випливає, що
|
|
(1.11.2) |
Радіус-вектор
![]() точки відносно ІСВ є векторною сумою
відносного радіуса-вектора
точки відносно ІСВ є векторною сумою
відносного радіуса-вектора
![]() і вектора
і вектора
![]() ,
що визначає положення центра Землі
відносно ІСВ.
,
що визначає положення центра Землі
відносно ІСВ.
Позначимо
через
![]() мале переміщення частинки відносно
центра мас Сонця. З мал.1.11.1 випливає, що
у загальному випадку його можна записати
як суму трьох векторів, які відповідають
переміщенням із-за частинних рухів:
мале переміщення частинки відносно
центра мас Сонця. З мал.1.11.1 випливає, що
у загальному випадку його можна записати
як суму трьох векторів, які відповідають
переміщенням із-за частинних рухів:
|
|
(1.11.3) |
Де
![]()
![]() – мале переміщення частинки
– мале переміщення частинки
![]() разом із Землею у її поступальному русі
навколо Сонця;
разом із Землею у її поступальному русі
навколо Сонця;
![]() – поворотне
переміщення відносно ІСВ внаслідок
обертання НІСВ (обертання Землі навколо
власної осі, як показано на Мал.1.11.2);
частинка
– поворотне
переміщення відносно ІСВ внаслідок
обертання НІСВ (обертання Землі навколо
власної осі, як показано на Мал.1.11.2);
частинка
![]() матиме вказані переміщення навіть у
тому випадку, коли вона закріплена на
поверхні Землі;
матиме вказані переміщення навіть у
тому випадку, коли вона закріплена на
поверхні Землі; 
![]() – переміщення матеріальної точки
– переміщення матеріальної точки
![]() внаслідок її руху відносно НІСВ, яке
називатимемо відносним переміщенням.
внаслідок її руху відносно НІСВ, яке
називатимемо відносним переміщенням.
Ввівши
вектор
![]() нескінченно малого повороту НІСВ, модуль
якого дорівнює куту повороту, а напрям
співпадає з віссю обертання Землі,
запишемо поворотне переміщення
нескінченно малого повороту НІСВ, модуль
якого дорівнює куту повороту, а напрям
співпадає з віссю обертання Землі,
запишемо поворотне переміщення
![]() як векторний добуток
як векторний добуток
![]() (див. Мал.1.11.2), що приводить формулу
(1.11.3) до наступного вигляду:
(див. Мал.1.11.2), що приводить формулу
(1.11.3) до наступного вигляду:
|
|
(1.11.3а) |
Поділивши
цю рівність на інтервал часу
![]() ,
протягом якого відбулось переміщення,
шляхом переходу до межі
,
протягом якого відбулось переміщення,
шляхом переходу до межі
![]() ,
одержимо вираз для абсолютної швидкості
,
одержимо вираз для абсолютної швидкості
![]() матеріальної точки
матеріальної точки
![]() відносно ІСВ через характеристики руху
НІСВ та відносну швидкість
відносно ІСВ через характеристики руху
НІСВ та відносну швидкість
![]() :
:
|
|
(1.11.4) |
Де
![]() – вектор кутової швидкості обертання
НІСВ;
– вектор кутової швидкості обертання
НІСВ;
![]() – швидкість
поступального руху НІСВ;
– швидкість
поступального руху НІСВ;
![]() – швидкість
переносу точки
– швидкість
переносу точки
![]() внаслідок обертання НІСВ;
внаслідок обертання НІСВ;
![]() – відносна
швидкість точки
– відносна
швидкість точки
![]() по поверхні Землі.
по поверхні Землі.
Суму
![]() +
+![]() перших двох складових у (1.11.4) називають
переносною швидкістю частинки.
перших двох складових у (1.11.4) називають
переносною швидкістю частинки.
![]() означає, що зміна розглядається відносно
нерухомої Землі, яка не обертається
навколо власної осі. Таку похідну
називатимемо “відносною”, оскільки
вона обчислюється в НІСВ.
означає, що зміна розглядається відносно
нерухомої Землі, яка не обертається
навколо власної осі. Таку похідну
називатимемо “відносною”, оскільки
вона обчислюється в НІСВ.
Для
обчислення абсолютної швидкості
![]() відносно ІСВ можна взяти похідну від
радіуса-вектора
відносно ІСВ можна взяти похідну від
радіуса-вектора
![]() ,
що визначається (1.11.2):
,
що визначається (1.11.2):
|
|
(1.11.5) |
Тут абсолютна похідна обчислюється відносно ІСВ. Порівнюючи (1.11.4) і (1.11.5), одержимо формулу зв’язку абсолютного і відносного диференціювання:
|
|
(1.11.6) |
Вона
свідчить, що абсолютна похідна довільного
вектора
![]() ,
визначеного в НІСВ, дорівнює сумі
векторного добутку кутової швидкості
неінерціальної системи відліку на цей
вектор і відносної похідної цього
вектора, яка обчислюється в НІСВ так,
наче ця система відліку нерухома і
належить до класу інерціальних. Зміст
(1.11.6) стане зрозумілішим, якщо згадати,
що з точки зору спостерігача в ІСВ зміни
вектора
,
визначеного в НІСВ, дорівнює сумі
векторного добутку кутової швидкості
неінерціальної системи відліку на цей
вектор і відносної похідної цього
вектора, яка обчислюється в НІСВ так,
наче ця система відліку нерухома і
належить до класу інерціальних. Зміст
(1.11.6) стане зрозумілішим, якщо згадати,
що з точки зору спостерігача в ІСВ зміни
вектора
![]() (Мал.1.11.1) викликаються двома причинами:
його поворотом через обертання НІСВ та
рухом матеріальної точки
(Мал.1.11.1) викликаються двома причинами:
його поворотом через обертання НІСВ та
рухом матеріальної точки
![]() відносно неінерціальної системи відліку.
Формула (1.11.6) враховує обидві причини.
Вона важлива у тому відношенні, що
дозволяє обчислити в ІСВ похідну
довільного вектора, заданого розкладом
на складові уздовж осей рухомої системи
координат
відносно неінерціальної системи відліку.
Формула (1.11.6) враховує обидві причини.
Вона важлива у тому відношенні, що
дозволяє обчислити в ІСВ похідну
довільного вектора, заданого розкладом
на складові уздовж осей рухомої системи
координат
![]() .
.
Для
обчислення абсолютного прискорення
![]() ,
що входить у рівняння динаміки (1.11.1),
про диференціюємо (1.11.4):
,
що входить у рівняння динаміки (1.11.1),
про диференціюємо (1.11.4):
|
|
(1.11.7) |
У
правій частині (1.11.7) присутні два вектори
![]() і
і
![]() ,
які визначені відносно НІСВ, тому при
обчисленні похідних від цих векторів
необхідно застосувати (1.11.6). Виконавши
нескладні алгебраїчні перетворення,
маємо формулу для абсолютного прискорення:
,
які визначені відносно НІСВ, тому при
обчисленні похідних від цих векторів
необхідно застосувати (1.11.6). Виконавши
нескладні алгебраїчні перетворення,
маємо формулу для абсолютного прискорення:
|
|
(1.11.8) |
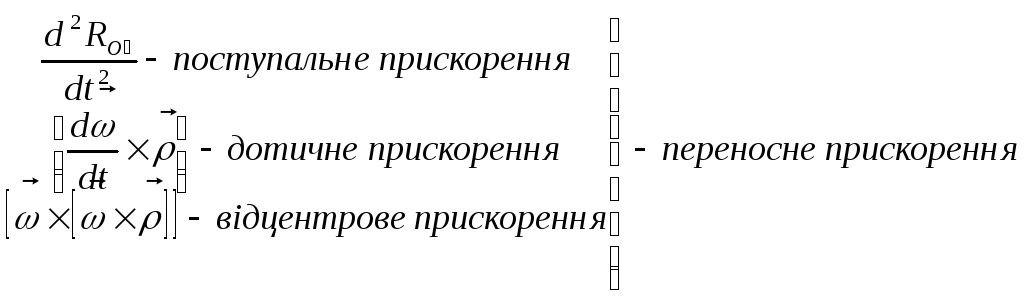
Де
![]() абсолютне прискорення;
абсолютне прискорення;
 ;
;
![]() – прискорення
Коріоліса;
– прискорення
Коріоліса;
![]() – відносне прискорення.
– відносне прискорення.
Якщо підставити (1.11.8) у рівняння динаміки (1.11.1), то маємо:
|
|
(1.11.9) |
Отже,
заміна вектора
![]() на суму
на суму
![]() і
і
![]() спричинила заміну вектора абсолютного
прискорення
спричинила заміну вектора абсолютного
прискорення
![]() на суму п’яти прискорень. Перші три з
них, що складають у сумі переносне
прискорення, являють собою прискорення
тієї точки НІСВ, яку у даний момент
займає частинка
на суму п’яти прискорень. Перші три з
них, що складають у сумі переносне
прискорення, являють собою прискорення
тієї точки НІСВ, яку у даний момент
займає частинка
![]() .
Прискорення Коріоліса
.
Прискорення Коріоліса
![]() має комбінований характер, бо визначається
кутовою швидкістю НІСВ і відносною
швидкістю частинки і не залежить від
положення її в НІСВ.
має комбінований характер, бо визначається
кутовою швидкістю НІСВ і відносною
швидкістю частинки і не залежить від
положення її в НІСВ.
Диференціальне
рівняння (1.11.9) має звичну структуру:
ліва його частина складається з добутків
маси частинки
![]() на прискорення, права – з сил її взаємодії
з оточуючими тілами. Шуканий закон руху
матеріальної точки у НІСВ одержимо з
(1.11.9) тоді, коли перенесемо у праву його
частину з лівої чотири з п’яти складових,
залишивши в ній лише добуток маси
частинки на вектор відносного прискорення,
що дозволить надати йому такого ж
вигляду, який мало вихідне рівняння
(1.11.1) руху відносно ІСВ:
на прискорення, права – з сил її взаємодії
з оточуючими тілами. Шуканий закон руху
матеріальної точки у НІСВ одержимо з
(1.11.9) тоді, коли перенесемо у праву його
частину з лівої чотири з п’яти складових,
залишивши в ній лише добуток маси
частинки на вектор відносного прискорення,
що дозволить надати йому такого ж
вигляду, який мало вихідне рівняння
(1.11.1) руху відносно ІСВ:
|
|
(1.11.10) |
Диференціальне рівняння другого порядку (1.11.10) називається рівнянням динаміки матеріальної точки в НІСВ.
З
рівняння (1.11.10) випливає, що навіть цілком
вільна частинка, для якої дорівнює нулю
векторна сума сил її взаємодії з
оточуючими тілами (![]() =0),
по відношенню до НІСВ завжди буде
рухатись прискорено, що означає повну
непридатність закону інерції Ньютона
до неінерціальних систем відліку. Для
спостерігача в неінерціальній системі
відліку ситуація виглядає так, наче на
таку частинку діють чотири сили, що
зумовлюють її прискорений рух. Чотири
добутки маси частинки
=0),
по відношенню до НІСВ завжди буде
рухатись прискорено, що означає повну
непридатність закону інерції Ньютона
до неінерціальних систем відліку. Для
спостерігача в неінерціальній системі
відліку ситуація виглядає так, наче на
таку частинку діють чотири сили, що
зумовлюють її прискорений рух. Чотири
добутки маси частинки
![]() на прискорення у правій частині рівняння
(1.11.10) називатимемо силами інерції в
НІСВ, коротко – сили інерції.
на прискорення у правій частині рівняння
(1.11.10) називатимемо силами інерції в
НІСВ, коротко – сили інерції.