

- •Передмова
- •1.1.1. Завдання та наукові основи механічного обробітку ґрунту
- •1.1.2. Операції, способи, машини і знаряддя для обробітку ґрунту
- •1.1.3. Ґрунт як об’єкт обробітку
- •1.2.1. Теоретичні основи технологічного процесу оранки
- •1.2.2. Ножі та теорія різання ґрунту лезом
- •1.2.3. Плужні корпуси та взаємодія клину з ґрунтом
- •1.2.5. Визначення параметрів польової дошки
- •1.2.7. Особливості швидкісних робочих поверхонь плужних корпусів
- •1.2.8. Сили, що діють на плужний корпус
- •1.2.9. Тяговий опір плуга
- •1.2.10. Обґрунтування схеми розміщення робочих органів на рамі плуга
- •1.2.11. Умови рівноваги плуга
- •1.3. Теорія та розрахунок дискових ґрунтообробних машин і знарядь
- •1.3.1. Основні геометричні параметри дисків
- •1.3.2. Регульовані технологічні параметри та процес роботи дисків
- •1.3.3. Силова характеристика і тяговий опір дискових робочих органів
- •1.4. Теорія та розрахунок зубових борін
- •1.4.1. Робочі органи і процес роботи зубових борін
- •1.4.2. Розміщення зубів на рамі борони
- •1.4.3. Рівновага і тяговий опір зубової борони
- •1.5. Теорія та розрахунок культиваторів
- •1.5.1. Робочі органи культиваторів та їхні параметри
- •1.5.2. Дія полільних і універсальних лап на коріння бур’янів
- •1.5.3. Взаємне розміщення полільних і універсальних лап
- •1.5.4. Дія розпушувальних лап на ґрунт і їх взаємне розміщення
- •1.5.5. Система кріплення лап до рами та стійкість ходу по глибині
- •1.5.6. Визначення основних параметрів культиваторів
- •1.6.1. Робочі органи фрез, проріджувачів і штангових культиваторів
- •1.6.2. Процес роботи і траєкторія руху робочих органів фрези та проріджувача
- •1.6.3. Основні параметри роботи фрези
- •1.6.4. Витрати потужності для роботи фрези
- •1.6.5. Визначення основних параметрів фрези
- •1.7. Теорія та розрахунок котків
- •1.7.1. Процес дії котка на ґрунт
- •1.7.2. Визначення параметрів котка
- •1.7.3. Опір перекочуванню котка
- •Основи теорії та розрахунку машин для сівби і садіння
- •2.1. Основні властивості насіння
- •2.1.1. Технологічні властивості насіння
- •2.1.2. Закономірності руху насіння
- •2.2. Типи робочих органів сівалок
- •2.2.1. Основи розрахунку котушкових висівних апаратів
- •2.2.2. Основи теорії та розрахунку дискових висівних апаратів
- •2.2.3. Основи теорії та розрахунку пневматичних висівних апаратів
- •2.2.4. Основи теорії сошників
- •2.3. Типи робочих органів машин для садіння
- •2.3.1. Основи теорії картоплесадильних машин
- •2.3.2. Основи теорії машин для садіння розсади
- •Основи теорії та розрахунку машин для внесення добрив
- •3.1. Способи внесення добрив, види добрив та їхні технологічні властивості
- •3.2. Типи робочих органів машин для внесення мінеральних добрив
- •3.2.1. Основи теорії дискових дозувальних апаратів
- •3.2.2. Основи теорії відцентрових розсіювальних дисків
- •3.3. Типи робочих органів машин для внесення органічних добрив
- •3.3.1. Вибір і обґрунтування параметрів конвеєрного дозувального апарата
- •3.3.2. Вибір і обґрунтування параметрів розкидального апарата органічних добрив
- •Основи теорії та розрахунку машин для захисту рослин
- •4.1. Основи теорії розпилення рідин і порошків
- •4.1.1. Механічне розпилення рідин
- •4.1.2. Утворення електрично заряджених аерозолів
- •4.1.3. Розпилення порошків
- •4.1.4. Конденсаційне утворення аерозолів
- •4.1.5. Вплив розмірів краплин на ефективність обприскування і обґрунтування оптимальної дисперсності
- •4.2. Технологічний розрахунок робочих органів обприскувачів
- •4.2.1. Розрахунок параметрів баків і мішалок
- •4.2.2. Розрахунок параметрів насосів
- •4.2.3. Розрахунок параметрів розпилювальних пристроїв
- •4.3. Технологічний розрахунок робочих органів протруювачів
- •4.4. Технологічний розрахунок робочих органів обпилювачів
- •5.1. Подільники і стеблепідіймачі
- •5.1.1. Основи теорії, призначення, типи і застосування подільників
- •5.1.2. Основи теорії, призначення, типи і застосування стеблепідіймачів та гичкопідіймачів
- •5.2. Мотовила
- •5.2.1. Призначення, типи і застосування мотовил
- •5.2.2. Основи теорії та розрахунку мотовил
- •5.3. Різальні апарати
- •5.3.1. Призначення, типи і застосування різальних апаратів
- •5.3.2. Параметри, що впливають на різальну здатність ножа
- •5.3.4. Ротаційні різальні апарати з вертикальною віссю обертання. Типи. Основи теорії та розрахунку
- •5.3.6. Ротаційні різальні апарати з горизонтальною віссю обертання. Основи теорії та розрахунку
- •5.4. Вальцьові апарати
- •5.4.1. Типи і призначення вальцьових апаратів
- •5.4.2. Основи теорії та розрахунку вальцьових апаратів
- •5.5. Подрібнювальні апарати
- •5.5.1. Призначення, типи і застосування подрібнювальних апаратів
- •5.5.2. Основи теорії та розрахунку подрібнювачів кормозбиральних комбайнів
- •5.6. Транспортувальні пристрої жаток
- •5.6.1. Призначення, типи і застосування транспортувальних пристроїв жаток
- •5.6.2. Основи теорії та розрахунку транспортувальних пристроїв жаток
- •5.7. Обчісувальні пристрої
- •5.7.1. Призначення, типи і застосування обчісувальних пристроїв
- •5.7.2. Основи теорії та розрахунку обчісувальних пристроїв
- •5.8. Підбирачі
- •5.8.1. Призначення, типи і застосування підбирачів
- •5.8.2. Основи теорії та розрахунку підбирачів
- •Основи теорії та розрахунку робочих органів молотарок зернозбиральних комбайнів
- •6.1. Молотильно-сепарувальні пристрої
- •6.2. Соломовідокремлювачі
- •6.2.1. Призначення і типи соломовідокремлювачів
- •6.2.2. Основи теорії та розрахунку соломовідокремлювачів
- •6.3. Очисники зерна
- •6.3.1. Призначення, типи, параметри і режим роботи очисників зерна
- •6.4. Домолочувальні пристрої
- •6.4.1. Призначення, типи, параметри і режим роботи домолочувальних пристроїв
- •6.5. Бункери для зерна
- •6.5.1. Елементи конструкції і параметри бункерів для зерна
- •6.5.2. Тривалість заповнення і розвантаження бункера
- •6.6. Продуктивність і пропускна здатність комбайна
- •Основи теорії та розрахунку робочих органів для згрібання і пресування сіна
- •7.1. Типи робочих органів і процес згрібання сіна
- •7.2. Обґрунтування параметрів і режимів роботи поперечних граблів
- •7.4.1. Типи робочих органів пресів
- •7.4.2. Обґрунтування параметрів пресувальної камери
- •Основи теорії робочих процесів машин для збирання кукурудзи на зерно
- •8.2. Основні робочі органи кукурудзозбиральних машин
- •8.4. Пропускна здатність і швидкість обертання відокремлювальних вальців
- •8.5.1. Вибір розмірів і частоти обертання очисних вальців
- •Основи теорії та розрахунку машин для післязбиральної обробки зерна
- •9.1. Принципи очищення і сортування зерна
- •9.2. Способи очищення і сортування зерна
- •9.3. Фізико-механічні властивості зернових сумішей
- •9.3.1. Геометричні розміри насіння
- •9.3.2. Аеродинамічні властивості зернових сумішей
- •9.3.3. Інші властивості зернових сумішей
- •9.4. Робота плоских решіт
- •9.4.1. Умови переміщення матеріалу на решеті, що коливається
- •9.4.2. Умови проходження зерна крізь отвори решета
- •9.4.3. Повнота розділення зерна і режим роботи решіт
- •9.4.4. Кінематичний режим роботи решіт
- •9.4.5. Навантаження на решета та їх продуктивність
- •9.5. Робота циліндричного трієра
- •9.5.1. Теоретичні основи роботи трієра
- •9.5.2. Випадання зерна з комірки трієра і установлення приймального лотока
- •9.5.3. Режим роботи циліндричного трієра
- •9.5.4. Продуктивність трієра
- •9.6. Фрикційне очищення
- •9.7. Повітряні системи
- •9.7.1. Робочий процес у вертикальному каналі з нагнітанням повітря
- •9.7.2. Робочий процес похилого повітряного потоку
- •9.8. Теорія та розрахунок вентиляторів
- •9.8.1. Типи вентиляторів
- •9.8.2. Основне рівняння вентилятора
- •9.8.3. Вибір вентилятора
- •9.9. Основи теорії сушіння зерна
- •9.9.1. Властивості зерна як об’єкта сушіння
- •9.9.2. Загальна схема процесу сушіння
- •9.9.3. Режим роботи і продуктивність сушарок
- •Основи теорії та розрахунку бурякозбиральних машин
- •10.2. Основи розрахунку параметрів апаратів для зрізування гички та очищення головок коренеплодів
- •10.2.1. Апарати для зрізування гички
- •10.2.2. Очисники головок коренеплодів цукрових буряків на корені
- •10.3. Типи та основні параметри викопувальних робочих органів
- •10.3.1. Лемішні викопувальні робочі органи
- •10.3.2. Дискові викопувальні робочі органи
- •10.3.3. Роторні викопувальні робочі органи
- •10.4. Вибір, обґрунтування і розрахунок основних параметрів очищувальних робочих органів
- •Основи теорії та розрахунку машин для збирання картоплі
- •11.1. Машини і способи збирання картоплі
- •11.3. Типи та основні параметри підкопувальних робочих органів
- •11.4. Вибір та обґрунтування основних параметрів пруткового елеватора і грохота
- •11.5. Типи сортувальних робочих органів
- •11.6. Визначення основних параметрів сортувальної роликової поверхні
- •Основи теорії та розрахунку машин для збирання льону
- •12.1. Характеристика льону як об’єкта збирання
- •12.2. Машини і способи збирання льону
- •12.3.1. Типи бральних апаратів
- •12.3.2. Основи теорії бральних апаратів
- •12.4. Льонозбиральні комбайни
- •12.4.1. Типи і робочий процес льонозбиральних комбайнів
- •12.4.2. Вибір та обґрунтування основних параметрів обчісувальних апаратів
- •Список використаної літератури
Розділ 7
Розділ 7
ОСНОВИ ТЕОРІЇ ТА РОЗРАХУНКУ РОБОЧИХ ОРГАНІВ ДЛЯ ЗГРІБАННЯ І ПРЕСУВАННЯ СІНА
7.1. Типи робочих органів і процес згрібання сіна
У технологічному процесі збирання трав на сіно загальним для всіх способів збирання є згрібання пров’яленої трави із прокосів у валки, що дає змогу механізувати наступні операції, а в південних районах країни — захистити скошену масу від довгострокової дії сонячних променів під час сушіння в полі.
Для ворушіння трави в прокосах, згрібання у валки і обертання валків пров’яленої трави застосовують граблі, класифікацію яких подано на рис. 7.1. За характером утворення валка граблі поділяють на поперечні й бокові, при цьому поперечні граблі формують валки, розміщені впоперек напрямку руху агрегату, а бокові — вздовж.
За типом робочого органа граблі бувають зубові (поперечні), барабанні, колісно-пальцьові, конвеєрні і роторні. Колісно-пальцьові граблі обладнують втягнутими та підштовхувальними колесами.
За видом тяги розрізняють тракторні й кінні граблі, при цьому за способом агрегатування тракторні граблі бувають причіпні, навісні і напівнавісні. Найрізноманітнішу конструкцію мають бокові граблі. Поперечні граблі виконують тільки одну операцію — згрібання тра- ви, а бокові крім згрібання також ворушіння, розпушування, обер- тання валків і розкидання їх у разі зволоження. Поперечні граблі
Граблі
|
Поперечні |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Бокові |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Кінні |
|
|
|
Тракторні |
|
Барабанні |
|
Конвеєрні |
|
|
Колісно- |
|
|
Роторні |
|||||||||||
|
|
|
|
|
|
|
пальцові |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Причіпні |
|
|
|
Напів- |
|
Навісні |
|
|
Прямо- |
|
|
Косо- |
|
|
Із втяг- |
|
Зпід- |
||||||||
|
|
|
|
|
|
|
|
|
|
нутими |
|
штовхува- |
|||||||||||||
|
|
|
навісні |
|
|
|
|
|
|
кутні |
|
|
кутні |
|
|
колесами |
|
льними |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
колесами |
|
|
|
|
|
Рис. 7.1. Класифікація граблів |
|
|||||||||||||||||||
310
Основи теорії та розрахунку робочих органів для згрібання … сіна
утворюють валок, перпендикулярний до напрямку руху машини. Бо- кові граблі утворюють валок уздовж руху машини, оскільки згрібають пров’ялену траву в бік від напрямку руху.
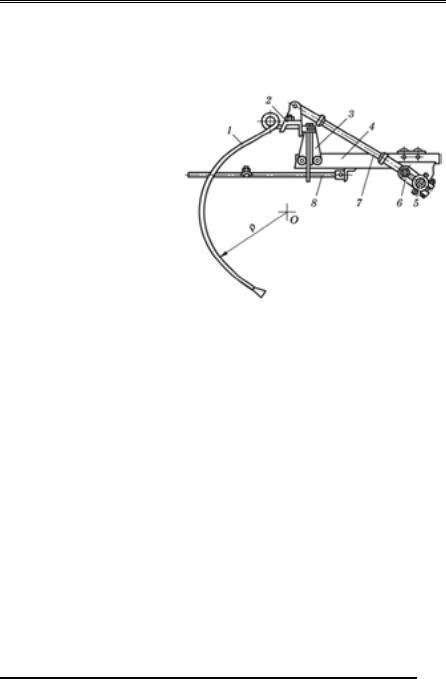
Основним робочим органом поперечних граблів є сталеві пру- жинні зуби 1, які утворюють короб і мають криволінійну форму та
вигнуті за |
дугою |
кола |
|
|||
радіусом ρ або логариф- |
|
|||||
мічної спіралі і які за |
|
|||||
допомогою |
зуботримачів |
|
||||
прикріплені до попереч- |
|
|||||
ного грабельного бруса 2 |
|
|||||
(рис. 7.2). Бруси з зубами |
|
|||||
шарнірно |
закріплено в |
|
||||
кронштейнах 3 рами 4. |
|
|||||
Зуби |
утворюють |
порож- |
|
|||
нину, в якій під час згрі- |
|
|||||
бання |
трав |
формується |
|
|||
валок. У верхній частині |
|
|||||
цієї порожнини розміще- |
|
|||||
но гребінку, яку викона- |
|
|||||
но у |
вигляді |
очисних |
|
|||
прутків 8. Ці прутки у |
Рис. 7.2. Зубовий грабельний апарат |
|||||
разі |
піднімання |
зубів |
поперечних граблів: |
|||
зіштовхують |
утворений |
1 — зуб; 2 — брус; 3 — кронштейн; 4 — рама; |
||||
5 — вал підйому; 6 — кривошип; 7 — тяга |
||||||
валок сіна на землю. Ви- |
підйому; 8 — очисний пруток |
|||||
сота |
зубів |
становить |
|
|||
700…725 |
мм, |
відстань |
|
|||
між суміжними зубами — 70…80 мм.
Під час роботи сіно, яке підбирається зубами, нагромаджується у ввігнутій частині грабельного апарата. Коли цей простір заповню- ється, вмикається механізм підйому, при цьому починає обертатися вал підйому 5, який через кривошип 6 і тягу підйому 7 повертає відносно центра обертання О грабельний брус із зубами. За полови- ну обороту підйомного вала зуби піднімаються в транспортне поло- ження, залишаючи зібране сіно у вигляді валка на полі.
При подальшому русі грабельний апарат опускається в робоче положення. Під час усіх наступних проходів механізм підйому вми- кають так, щоб утворювані валки вкладалися навпроти попередньо- го валка. Для повного згрібання трави кінці зубів мають торкатися поверхні землі, а в транспортному положенні розміщуватися на од- ній лінії. Положення грабельного апарата встановлюють зміною довжини тяги підйому 7 накручуванням або розкручуванням її го- ловки. При згрібанні сіна кінці зубів установлюють на відстані не більше ніж 1 см від поверхні поля.
311

Розділ 7
Під час згрібання валок тисне на зуби, тому грабе- льний брус, обертаючись, може піднятися. Щоб цього не сталося, граблі облад- нують пристроєм, який утримує зуби в притисну- тому до землі положенні доти, доки не сформується валок і не відбудеться його зіштовхування при вми- канні автомата підйому грабельного бруса.
Валки, сформовані граб- лями, мають бути прямолі- нійними, завширшки не більше ніж 1,3 м і рівномірної щільності за
довжиною. Прямолінійність валка забезпечується, якщо при насту- пних заїздах зуби піднімаються на одній прямій лінії з попереднім. Ширина валка залежить від траєкторії підйому ab і опускання bc1
або bс2 зубів (рис. 7.3). Траєкторія ab — геометричне місце точок,
отримане в результаті додавання складного руху: переносного зі швидкістю vм і відносного навколо осі О. Якщо грабельний брус по-
вертає механізм піднімання від коліс граблів, то траєкторія ab не залежить від швидкості руху vм. Якщо механізм приводиться в рух
від гідроциліндра, то залежить від швидкості vм.
Опускаються зуби під дією си- ли тяжіння, при цьому грабель- ний апарат розглядається як фі- зичний маятник. Траєкторія bc1 ,
bc2 руху кінця зуба залежить від
моменту інерції, положення цен- тра тяжіння грабельного апарата, висоти піднімання і швидкості руху граблів. Зі збільшенням ви- соти піднімання і швидкості пе- реміщення граблів зростає проек- ція ( s2 > s1 ) траєкторії на гори-
зонталь, а отже, і огріхи dc1 і
dc2.
Перевага поперечних граблів полягає у тому, що вони можуть
Рис. 7.4. Колісно-пальцьовий робочий орган:
1 — втулка; 2 — спиця; 3 — пальці; 4 — обід; 5 — кільце
312

Основи теорії та розрахунку робочих органів для згрібання … сіна
формувати валок із свіжоскошених і пров’ялених трав масою від 1 до 4 кг на 1 м довжини валка незалежно від урожайності трав.
Основним вузлом бокових граблів є колісно-пальцьовий робочий орган, який має вигляд колеса, що складається із втулки 1 (рис. 7.4), спиць 2 і пружинних пальців 3, пропущених крізь отвір в ободі 4 і закріплених на кільці 5. Колеса встановлюють під кутом α = 45° до напрямку руху і під час роботи спираються на поверхню ґрунту. Ко- леса вільно обертаються на осях з кутовою швидкістю ω, а пальці розміщуються в одній площині обертання і для полегшення зсування трави вони згинаються в бік, протилежний до напрямку обертання.
Граблі складаються з правої і лівої секцій, їх ширина захвату становить 6 м. У результаті руху агрегату і взаємодії пальців із ґрун- том колеса обертаються, а їхні пальці в нижньому положенні руха- ються по траєкторіях, подібних до прямих ліній і паралельних осям обертання коліс. Сіно, яке збирається колесами, переміщується в тому самому напрямку.
Якість роботи граблів залежить від тиску колеса на ґрунт. При цьому недостатній тиск як при згрібанні, так і при обертанні приво- дить до розриву і розкидання валка, а надмірний — спричинює за- бруднення сіна землею, яка розпушується пальцями. Залежно від умов роботи потрібний тиск забезпечується регулюванням аморти- заційних пружин. Безпосередньо на машині колісно-пальцьові ро- бочі органи об’єднані в секції, які на згрібанні сіна встановлюють
Рис. 7.5. Схеми граблів:
а — колісно-пальцьових; б — ротаційних; 1 і 2 — пальцьові колеса; 3 — пальці; 4 — петля; 5 — обід; 6 — спиця; 7 — кільце; 8 — ротор; 9 — граблина; 10 — щитки; І і ІІ — положення коліс під час згрібання і ворушіння
313