

- •Передмова
- •1.1.1. Завдання та наукові основи механічного обробітку ґрунту
- •1.1.2. Операції, способи, машини і знаряддя для обробітку ґрунту
- •1.1.3. Ґрунт як об’єкт обробітку
- •1.2.1. Теоретичні основи технологічного процесу оранки
- •1.2.2. Ножі та теорія різання ґрунту лезом
- •1.2.3. Плужні корпуси та взаємодія клину з ґрунтом
- •1.2.5. Визначення параметрів польової дошки
- •1.2.7. Особливості швидкісних робочих поверхонь плужних корпусів
- •1.2.8. Сили, що діють на плужний корпус
- •1.2.9. Тяговий опір плуга
- •1.2.10. Обґрунтування схеми розміщення робочих органів на рамі плуга
- •1.2.11. Умови рівноваги плуга
- •1.3. Теорія та розрахунок дискових ґрунтообробних машин і знарядь
- •1.3.1. Основні геометричні параметри дисків
- •1.3.2. Регульовані технологічні параметри та процес роботи дисків
- •1.3.3. Силова характеристика і тяговий опір дискових робочих органів
- •1.4. Теорія та розрахунок зубових борін
- •1.4.1. Робочі органи і процес роботи зубових борін
- •1.4.2. Розміщення зубів на рамі борони
- •1.4.3. Рівновага і тяговий опір зубової борони
- •1.5. Теорія та розрахунок культиваторів
- •1.5.1. Робочі органи культиваторів та їхні параметри
- •1.5.2. Дія полільних і універсальних лап на коріння бур’янів
- •1.5.3. Взаємне розміщення полільних і універсальних лап
- •1.5.4. Дія розпушувальних лап на ґрунт і їх взаємне розміщення
- •1.5.5. Система кріплення лап до рами та стійкість ходу по глибині
- •1.5.6. Визначення основних параметрів культиваторів
- •1.6.1. Робочі органи фрез, проріджувачів і штангових культиваторів
- •1.6.2. Процес роботи і траєкторія руху робочих органів фрези та проріджувача
- •1.6.3. Основні параметри роботи фрези
- •1.6.4. Витрати потужності для роботи фрези
- •1.6.5. Визначення основних параметрів фрези
- •1.7. Теорія та розрахунок котків
- •1.7.1. Процес дії котка на ґрунт
- •1.7.2. Визначення параметрів котка
- •1.7.3. Опір перекочуванню котка
- •Основи теорії та розрахунку машин для сівби і садіння
- •2.1. Основні властивості насіння
- •2.1.1. Технологічні властивості насіння
- •2.1.2. Закономірності руху насіння
- •2.2. Типи робочих органів сівалок
- •2.2.1. Основи розрахунку котушкових висівних апаратів
- •2.2.2. Основи теорії та розрахунку дискових висівних апаратів
- •2.2.3. Основи теорії та розрахунку пневматичних висівних апаратів
- •2.2.4. Основи теорії сошників
- •2.3. Типи робочих органів машин для садіння
- •2.3.1. Основи теорії картоплесадильних машин
- •2.3.2. Основи теорії машин для садіння розсади
- •Основи теорії та розрахунку машин для внесення добрив
- •3.1. Способи внесення добрив, види добрив та їхні технологічні властивості
- •3.2. Типи робочих органів машин для внесення мінеральних добрив
- •3.2.1. Основи теорії дискових дозувальних апаратів
- •3.2.2. Основи теорії відцентрових розсіювальних дисків
- •3.3. Типи робочих органів машин для внесення органічних добрив
- •3.3.1. Вибір і обґрунтування параметрів конвеєрного дозувального апарата
- •3.3.2. Вибір і обґрунтування параметрів розкидального апарата органічних добрив
- •Основи теорії та розрахунку машин для захисту рослин
- •4.1. Основи теорії розпилення рідин і порошків
- •4.1.1. Механічне розпилення рідин
- •4.1.2. Утворення електрично заряджених аерозолів
- •4.1.3. Розпилення порошків
- •4.1.4. Конденсаційне утворення аерозолів
- •4.1.5. Вплив розмірів краплин на ефективність обприскування і обґрунтування оптимальної дисперсності
- •4.2. Технологічний розрахунок робочих органів обприскувачів
- •4.2.1. Розрахунок параметрів баків і мішалок
- •4.2.2. Розрахунок параметрів насосів
- •4.2.3. Розрахунок параметрів розпилювальних пристроїв
- •4.3. Технологічний розрахунок робочих органів протруювачів
- •4.4. Технологічний розрахунок робочих органів обпилювачів
- •5.1. Подільники і стеблепідіймачі
- •5.1.1. Основи теорії, призначення, типи і застосування подільників
- •5.1.2. Основи теорії, призначення, типи і застосування стеблепідіймачів та гичкопідіймачів
- •5.2. Мотовила
- •5.2.1. Призначення, типи і застосування мотовил
- •5.2.2. Основи теорії та розрахунку мотовил
- •5.3. Різальні апарати
- •5.3.1. Призначення, типи і застосування різальних апаратів
- •5.3.2. Параметри, що впливають на різальну здатність ножа
- •5.3.4. Ротаційні різальні апарати з вертикальною віссю обертання. Типи. Основи теорії та розрахунку
- •5.3.6. Ротаційні різальні апарати з горизонтальною віссю обертання. Основи теорії та розрахунку
- •5.4. Вальцьові апарати
- •5.4.1. Типи і призначення вальцьових апаратів
- •5.4.2. Основи теорії та розрахунку вальцьових апаратів
- •5.5. Подрібнювальні апарати
- •5.5.1. Призначення, типи і застосування подрібнювальних апаратів
- •5.5.2. Основи теорії та розрахунку подрібнювачів кормозбиральних комбайнів
- •5.6. Транспортувальні пристрої жаток
- •5.6.1. Призначення, типи і застосування транспортувальних пристроїв жаток
- •5.6.2. Основи теорії та розрахунку транспортувальних пристроїв жаток
- •5.7. Обчісувальні пристрої
- •5.7.1. Призначення, типи і застосування обчісувальних пристроїв
- •5.7.2. Основи теорії та розрахунку обчісувальних пристроїв
- •5.8. Підбирачі
- •5.8.1. Призначення, типи і застосування підбирачів
- •5.8.2. Основи теорії та розрахунку підбирачів
- •Основи теорії та розрахунку робочих органів молотарок зернозбиральних комбайнів
- •6.1. Молотильно-сепарувальні пристрої
- •6.2. Соломовідокремлювачі
- •6.2.1. Призначення і типи соломовідокремлювачів
- •6.2.2. Основи теорії та розрахунку соломовідокремлювачів
- •6.3. Очисники зерна
- •6.3.1. Призначення, типи, параметри і режим роботи очисників зерна
- •6.4. Домолочувальні пристрої
- •6.4.1. Призначення, типи, параметри і режим роботи домолочувальних пристроїв
- •6.5. Бункери для зерна
- •6.5.1. Елементи конструкції і параметри бункерів для зерна
- •6.5.2. Тривалість заповнення і розвантаження бункера
- •6.6. Продуктивність і пропускна здатність комбайна
- •Основи теорії та розрахунку робочих органів для згрібання і пресування сіна
- •7.1. Типи робочих органів і процес згрібання сіна
- •7.2. Обґрунтування параметрів і режимів роботи поперечних граблів
- •7.4.1. Типи робочих органів пресів
- •7.4.2. Обґрунтування параметрів пресувальної камери
- •Основи теорії робочих процесів машин для збирання кукурудзи на зерно
- •8.2. Основні робочі органи кукурудзозбиральних машин
- •8.4. Пропускна здатність і швидкість обертання відокремлювальних вальців
- •8.5.1. Вибір розмірів і частоти обертання очисних вальців
- •Основи теорії та розрахунку машин для післязбиральної обробки зерна
- •9.1. Принципи очищення і сортування зерна
- •9.2. Способи очищення і сортування зерна
- •9.3. Фізико-механічні властивості зернових сумішей
- •9.3.1. Геометричні розміри насіння
- •9.3.2. Аеродинамічні властивості зернових сумішей
- •9.3.3. Інші властивості зернових сумішей
- •9.4. Робота плоских решіт
- •9.4.1. Умови переміщення матеріалу на решеті, що коливається
- •9.4.2. Умови проходження зерна крізь отвори решета
- •9.4.3. Повнота розділення зерна і режим роботи решіт
- •9.4.4. Кінематичний режим роботи решіт
- •9.4.5. Навантаження на решета та їх продуктивність
- •9.5. Робота циліндричного трієра
- •9.5.1. Теоретичні основи роботи трієра
- •9.5.2. Випадання зерна з комірки трієра і установлення приймального лотока
- •9.5.3. Режим роботи циліндричного трієра
- •9.5.4. Продуктивність трієра
- •9.6. Фрикційне очищення
- •9.7. Повітряні системи
- •9.7.1. Робочий процес у вертикальному каналі з нагнітанням повітря
- •9.7.2. Робочий процес похилого повітряного потоку
- •9.8. Теорія та розрахунок вентиляторів
- •9.8.1. Типи вентиляторів
- •9.8.2. Основне рівняння вентилятора
- •9.8.3. Вибір вентилятора
- •9.9. Основи теорії сушіння зерна
- •9.9.1. Властивості зерна як об’єкта сушіння
- •9.9.2. Загальна схема процесу сушіння
- •9.9.3. Режим роботи і продуктивність сушарок
- •Основи теорії та розрахунку бурякозбиральних машин
- •10.2. Основи розрахунку параметрів апаратів для зрізування гички та очищення головок коренеплодів
- •10.2.1. Апарати для зрізування гички
- •10.2.2. Очисники головок коренеплодів цукрових буряків на корені
- •10.3. Типи та основні параметри викопувальних робочих органів
- •10.3.1. Лемішні викопувальні робочі органи
- •10.3.2. Дискові викопувальні робочі органи
- •10.3.3. Роторні викопувальні робочі органи
- •10.4. Вибір, обґрунтування і розрахунок основних параметрів очищувальних робочих органів
- •Основи теорії та розрахунку машин для збирання картоплі
- •11.1. Машини і способи збирання картоплі
- •11.3. Типи та основні параметри підкопувальних робочих органів
- •11.4. Вибір та обґрунтування основних параметрів пруткового елеватора і грохота
- •11.5. Типи сортувальних робочих органів
- •11.6. Визначення основних параметрів сортувальної роликової поверхні
- •Основи теорії та розрахунку машин для збирання льону
- •12.1. Характеристика льону як об’єкта збирання
- •12.2. Машини і способи збирання льону
- •12.3.1. Типи бральних апаратів
- •12.3.2. Основи теорії бральних апаратів
- •12.4. Льонозбиральні комбайни
- •12.4.1. Типи і робочий процес льонозбиральних комбайнів
- •12.4.2. Вибір та обґрунтування основних параметрів обчісувальних апаратів
- •Список використаної літератури

Основи теорії та розрахунку косарок, косарок-плющилок …
5.8. Підбирачі
5.8.1. Призначення, типи і застосування підбирачів
Підбирачі призначені для підбирання валків рослинної маси при збиранні кормових і зернових культур та льону. Їх поділяють на ба- рабанні з пружинними пальцями, барабанні з жорсткими пальцями, що ховаються, полотенно-пальцьові та ланцюгово-пальцьові.
Барабанний підбирач з пружинними пальцями (рис. 5.54,
а) застосовують переважно при підбиранні трав і зернових культур. При підбиранні щільного валка зернових культур такий підбирач працює незадовільно: пальці надмірно відхиляються, ударна дія на масу збільшується (можливий вимолот зерна). Під час роботи підби- рача в зоні підбирання ролики кривошипів перекочуються по колу abb, а в зоні передачі маси на транспортувальний пристрій — по напрямній доріжці bda спеціального профілю.
Барабанний підбирач з жорсткими пальцями, що хова-
ються (рис. 5.54, б), добре працює при підбиранні валків, у яких сте- бла переплутані. Його застосовують переважно для підбирання тре- сти льону, а механізм — у шнеках жаток і бітерах проставок. Під час роботи такого підбирача його барабан 9 вічками 8 веде за собою пальці 7. Оскільки втулки пальців обертаються на колінчастій осі 6, геометрична вісь якої зміщена відносно осі барабана, пальці плавно виходять із барабана і ховаються в ньому, описуючи траєкторію.
Полотенно-пальцьовий підбирач (рис. 5.54, в) застосовують при підбиранні валків зернових культур, особливо легкообмолочу- вальних — бобових, круп’яних, насінників трав тощо, адже полотно уловлює зерна, що осипались.
Ланцюгово-пальцьовий підбирач (рис. 5.54, г) найчастіше за-
стосовують при підбиранні трав із пресуванням, копнуванням і по- дрібненням. Вони більш стійко виконують технологічний процес порівняно з полотенно-пальцьовими. Пальці такого підбирача шар- нірно з’єднані з ланцюгом і мають кривошипи з роликами, які пе- реміщуються по напрямній доріжці спеціального профілю.
5.8.2. Основи теорії та розрахунку підбирачів
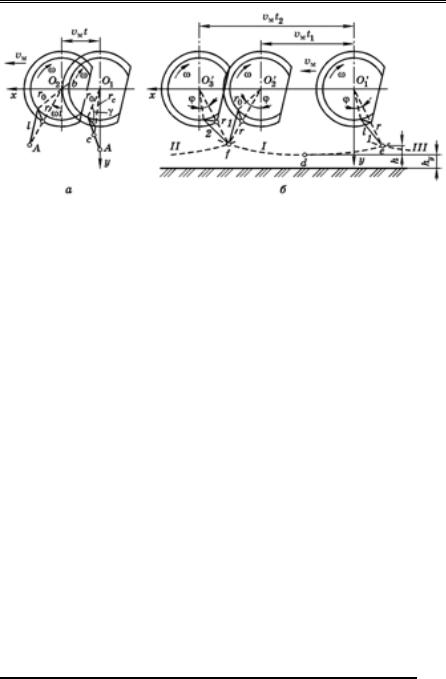
Підбирач з пружинними пальцями. Траєкторія абсолют-
ного руху кінцевої точки пальця. Рівняння руху кінцевої точ-
ки А пальця (рис. 5.55, а) в системі координат хОу аналогічні рів-
нянням (5.69) і (5.70), тобто
xA = r sinωt + vмt; yA = r cosωt, |
(5.129) |
де r — відстань від центра барабана О до кінця пальця; ωt — кут повороту барабана; vм — швидкість машини; t — час, за який бара-
бан повернеться на кут ωt.
267

Розділ 5
Рис. 5.54. Схеми підбирачів:
а — барабанного з пружинними пальцями; б — барабанного з жорсткими пальця- ми, що ховаються; в — полотенно-пальцьового; г — ланцюгово-пальцьового; 1 — бігова доріжка; 2 — ролик кривошипа; 3 — палець; 4 — граблина; 5 — центральний вал; 6 — колінчаста вісь; 7 — палець; 8 — вічко; 9 — барабан; 10 — палець; 11 — конвеєр; 12 — ланцюг; 13 — ролик; 14 — палець; 15 — напрямна доріжка
268
Основи теорії та розрахунку косарок, косарок-плющилок …
Рис. 5.55. Схема переміщення (а) і траєкторія пружинного пальця підбирача (б):
1 і 2 — пальці; І, ІІ і ІІІ — траєкторії
Залежності (5.129) є рівняннями циклоїди, траєкторія якої має вигляд І, ІІ і ІІІ.
Кінематичний режим роботи. Нехай траєкторії І, ІІ і ІІІ
перетинаються в точках e і f (рис. 5.55, б).
Підбирання валка без втрат відбувається за умови |
|
h + hy ≤ H, |
(5.130) |
де h — відстань по вертикалі від нижньої точки d циклоїди до то- чок e і f перетинання суміжних циклоїд; hy — мінімальна від-
стань між поверхнею поля і циклоїдою; H — відстань від поверхні поля до нижнього рівня валка.
Умова (5.130) виконується при співвідношенні параметрів і ре- жиму роботи підбирача і визначається з таких міркувань.
Координата хА кінця пальця 1, що переміщується по циклоїді І,
дорівнює |
|
xA = rsinϕ + vмt1, |
(5.131) |
де ϕ — кут повороту барабана.
У точку f доходить кінець пальця 2, що розміщується на суміж- ному валу, який рухається по траєкторії ІІ. Для пальця 2 координа-
та |
|
xA = vмt2 – rsinϕ, |
(5.132) |
де t2 — час повороту барабана на кут β між граблинами. |
|
269
Розділ 5
Оскільки 2ϕ = ωt1; β = ωt2, |
то |
із залежностей |
(5.131) і (5.132) |
|
знайдемо |
|
β − 2ϕ |
|
|
ωr |
= |
. |
(5.133) |
|
v |
|
|||
|
2sin ϕ |
|
||
м |
|
|
|
|
Із рис. 5.55 видно, що r −h = rcosϕ. Визначивши звідси sin ϕ і ϕ, позначивши 2π/β = z (де z — кількість граблин з пальцями), ωr/vм = λ
та використавши залежності (5.130) і (5.133), отримаємо залежність для визначення кінематичного режиму роботи λ підбирача
π |
|
α′, |
(5.134) |
λ ≥ |
−arcsin α′ |
||
z |
|
|
|
де α′ = |
2 |
(H − hy ) |
− |
(H − h y )2 |
. |
|
|
r2 |
|||
|
r |
||||
|
|
|
|
Аналіз залежності (5.134) показує, що для зменшення висоти h
гребеня потрібно збільшувати показник λ кінематичного режиму роботи. Проте збільшення λ призводить до розриву валка і підви- щення сили удару пальців по масі. За незначних λ валок скупчуєть- ся перед барабаном підбирача, що небажано. Щоб валок не розри- вався і не скупчувався, горизонтальна складова абсолютної швидко- сті середини пальця (точка с, рис. 5.55, а) у верхньому його поло- женні (cosωt = –1) має дорівнювати нулю. Здиференціювавши пер- ше рівняння залежностей (5.129), отримаємо
|
|
dxc = ωr cosωt +v |
= 0. |
|
(5.135) |
|||||||
|
|
dt |
c |
|
|
м |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||
Тоді при cosωt = –1 отримаємо rс = vм/ω. Із рис. 5.55 видно, що |
||||||||||||
r = |
l2 |
+ r2 |
−lr |
cos γ; |
r = |
l2 + r2 |
− 2lr cos γ. |
|||||
c |
4 |
0 |
0 |
|
|
|
|
|
0 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Замінивши r у співвідношенні λ = ωr/vм, дістанемо |
||||||||||||
|
|
|
λ = |
2 + |
|
ω2 |
|
. |
|
(5.136) |
||
|
|
|
v2 |
|
2 |
− r2 |
|
|
||||
|
|
|
|
|
l |
|
|
|
|
|||
|
|
|
|
|
м |
|
0 |
|
|
|
||
|
|
|
|
|
|
2 |
|
|
|
|
||
Умови (5.134) і (5.136) виконуються при 1,5 |
≤ λ ≤ 2,5. Якщо маса |
|||||||||||
1 м довжини валка менша ніж 3 кг і хлібна маса занадто суха (воло- гість 12 %), то краще брати менші значення λ. Зі збільшенням швидкості машини (vм > 5 км/год) значення λ зменшують.
270

Основи теорії та розрахунку косарок, косарок-плющилок …
Частота обертання граблин барабана підбирача. Обмо-
лот колосків при підбиранні і можливі при цьому втрати зерна ви- значаються зусиллям ударного імпульсу, з яким пальці діють на валок. Зусилля залежить від швидкості удару.
Із залежностей (5.129) і (5.133) маємо залежність для визначення абсолютної швидкості ua удару кінцями пальців по масі
u |
= v 1 + 2λcosϕ + λ2 . |
(5.137) |
a |
м |
|
Найбільше значення швидкості ua буде при cosϕ = 1. Тоді
ua = vм(1 + λ). |
(5.138) |
Абсолютна швидкість ua не має бути більшою від допустимої швидкості uд удару по масі, тобто ua ≤ uд. Звідси
λ ≤ uд/(vм – 1). |
(5.139) |
Оскільки λ = u/vм, u = 2πnr, то частота обертання пальців
n ≤ (uд – vм)/(2πr). |
(5.140) |
Крок підбирача. Довжина валка, що підбирається одним рядом пальців барабана, визначається кроком Sz (за аналогією з мотови-
лом)
Sz = 2πr/λz, |
(5.141) |
де z — кількість граблин барабана.
Подача і частота обертання центрального вала підби-
рача. Подача — це крок Sz або шлях, який проходить машина за
час входу в стерню або виходу із неї пальців двох суміжних граблин, тобто Sz = vмt1.
Якщо підбирач має одну граблину, то t1 є часом одного оберту вала барабана: t1 = 60 / n, де n — частота обертання вала барабана, об/хв. Якщо підбирач має z граблин, то t1 = 60vм/nz, тоді подача, м,
Sz = 60vм/nz, |
(5.142) |
де vм — швидкість машини, м/с; n — частота обертання, об/хв:
n = 60vм/Szz. |
(5.143) |
Експериментальні дослідження показують, що для барабанних підбирачів із пружинними пальцями для підбирання валків зерно-
вих культур Sz ≤ 280 мм; n = 72…90 об/хв; z = 4; λ = 1,5…2,5.
271

Розділ 5
Барабанний підбирач з жорсткими пальцями, що хова-
ються. Функціональна залежність між кутом повороту α барабана і кутом повороту ϕ пальця. Барабанний підбирач з жорсткими пальцями, що ховаються (див. рис. 5.54, б), можна пода- ти у вигляді кінематичної схеми (рис. 5.56).
Умови роботоздатності такого механізму: OC > OO1; O1B > OC.
Тоді у відносному русі точка С описує траєкторію (коло) радіусом r, а точка B — радіусом R.
Із рис. 5.56 видно, що |
|
AC = rsinα; AC = AO1 tgϕ. |
(5.144) |
Оскільки AO1 = AO + e, а AO = rcosα, то AC = (rcosα + e)tgϕ. То-
ді із рівнянь (5.144) матимемо rsinα = (rcosα + e)tgϕ. Позначивши e r = k, отримаємо
r = k, отримаємо
ϕ = arctg |
sin α |
. |
(5.145) |
|
cos α + k |
||||
|
|
|
Кутова швидкість пальця.
Диференціал функції dϕ рівняння (5.145) дорівнює добутку похідної функції ϕ′ за аргументом α на дифе- ренціал аргументу dα, тобто
|
|
|
|
|
|
dϕ = ϕ′(α)dα. |
|
(5.146) |
|||||
|
|
|
|
Поділивши ліву і праву частини |
|||||||||
|
|
|
рівняння |
|
(5.146) |
на |
dt, |
тобто |
|||||
|
|
|
dϕ |
′ |
dα |
|
|
|
|
|
|
||
Рис. 5. 56. Кінематична схема |
dt |
= ϕ(α) |
dt |
|
, взявши |
похідну ϕ′(α) |
|||||||
та беручи до уваги, що |
dϕ |
=ω3 — ку- |
|||||||||||
підбирача з жорсткими пальця- |
|||||||||||||
ми, що ховаються: |
|
|
|
|
|
|
|
|
|
dt |
|
|
|
1 — барабан; 2 — вічко; 3 — палець; |
това швидкість пальця, а |
dα |
= ω1 — |
||||||||||
4 — колінчаста вісь |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
кутова швидкість барабана, ма- |
||||||||||
|
|
|
тимемо залежність для визначення |
||||||||||
кутової швидкості пальця підбирача |
|
|
|
|
|
|
|
|
|||||
ω |
= ω |
|
1 + kcos α |
|
. |
|
|
|
(5.147) |
||||
|
+ 2kcos α + k2 |
|
|
|
|||||||||
3 |
1 1 |
|
|
|
|
|
|||||||
Лінійна швидкість |
кінцевої |
точки |
|
пальця |
дорівнюватиме |
||||||||
uB = ω3R. |
|
|
|
|
|
|
|
|
|
|
|
|
|
272

Основи теорії та розрахунку косарок, косарок-плющилок …
Як показують розрахунки, для такого механізму характерним є те, що кутова ω3 і лінійна uB швидкості пальця — величини змінні
(рис. 5.57). Крім того, ці параметри можна змінити, не змінюючи кутової швидкості ω1 веденої ланки (барабана), а змінивши лише
співвідношення ексцентриситету e і радіуса r барабана, тобто e / r = k (див. графіки а і б на
рис. 5.57).
Таку закономірність викорис- товують не тільки в підбирачах, пальцьових механізмах шнеків і бітерів, а й у ротаційних різаль- них апаратах з вертикальною віссю обертання роторів косарок. Це пов’язано з тим, що в таких апаратах мають бути значні лі- нійні швидкості тільки в зоні різання, а в зоні холостого ходу ножі не повинні стикатися зі зрі- заною масою.
У підбирачах e = (0,45...0,55)r.
Менші значення відповідають підбирачам для трав, більші — для льону. Кінематичний режим роботи підбирача для трав
λ = 1,2...2,0.
Методика визначення λ аналогічна барабанному підбирачу з пружинними пальцями.
Полотенно-пальцьовий підбирач має закономірності робочо-
го процесу аналогічні стрічковим конвеєрам, установленим до горизонту під певним кутом.
Щодо кінематичного режиму λ роботи, то його визначають за фор- мулою
λ = lz /Sz, |
(5.148) |
де lz = 230…270 — відстань між поперечними рядами пальців, що встановлені на полотні, мм; Sz ≤ 200 мм — крок підбирача, якому відповідає λ = 1,0…1,1.
273