

С.Г Машини / Метод_СГМ_МС / Практикум_СГМ
.pdfА.С. КОБЕЦЬ О.М. КОБЕЦЬ А.М. ПУГАЧ
ТЕОРІЯ І РОЗРАХУНОК СІЛЬСЬКОГОСПОДАРСЬКИХ МАШИН
ПРАКТИКУМ
ДНІПРОПЕТРОВСЬК – 2011 ВИДАВНИЦТВО “СВІДЛЕР А.Л.”
УДК 631.3.001.24 (076.5) ББК 40.72 К55
РЕЦЕНЗЕНТИ:
А.Д. ГАРЬКАВИЙ, доктор техн. наук, професор (Вінницький національний аграрний університет; Л.М. ВАСИЛЬЄВ, доктор техн. наук, професор (Інститут геотехнічної ме-
ханіки ім. Н.С. Полякова НАН України); В.І. ДИРДА, доктор техн. наук, професор (Дніпропетровький державний аграрний університет).
Рекомендовано Міністерством аграрної політики України для використання в навчально-виховному процесі як навчальний посібник під час підготовки фахівців ОКР “бакалавр” напряму 6.100102 “Процеси, машини та обладнання агропромислового виробництва” у вищих навчальних закладах II–IV рівнів акредитації (лист № 18-28-13/1722 від 25.11.2010 р.)
КОБЕЦЬ А.С. Теорія і розрахунок сільськогосподарських машин: практикум / КОБЕЦЬ А.С., КОБЕЦЬ О.М., ПУГАЧ А.М. – Дніпропетровськ:
Вид-во “Свідлер А.Л.”, 2011. – 164 с.
Наведено основні теоретичні положення та методика аналітичного і графічного визначення параметрів, режимів використання робочих органів та механізмів сільськогосподарських машин. Запропоновано завдання для самостійного опрацювання і виконання.
Матеріали видання можуть бути використані в курсовому проектуванні, у виконанні дипломних проектів та робіт при підготовці фахівців напряму підготовки 6.100102 – “Процеси, машини та обладнання агропромислового виробництва” та спеціальності “Механізація сільського господарства” в аграрних вищих навчальних закладах ІІІ–ІV рівнів акредитації.
УДК 631.3.001.24 (076.5) ББК 40.72
ISBN |
© КОБЕЦЬ А.С., |
|
КОБЕЦЬ О.М., |
|
ПУГАЧ А.М., |
|
2011 |
2
ПЕРЕДМОВА
Викладання дисципліни “Сільськогосподарські машини” передбачає здобуття студентами глибоких знань з теорії та розрахунку технологічних процесів і робочих органів машин, які необхідні для високоефективного використання технічних засобів механізації в агропромисловому виробництві, проведення досліджень, спрямованих на вдосконалення існуючих і створення нових машин.
Відповідно до освітньо-кваліфікаційних вимог фахівець агропромислового виробництва повинен уміти виконувати технічні, кінематичні, енергетичні та інші розрахунки машин та їх робочих органів і вузлів.
Навчальна програма дисципліни включає виконання розрахун- ково-графічних робіт з метою засвоєння основ теорії і розрахунку робочих процесів сільськогосподарських машин. Це і є однією із складових практикуму, що пропонується.
Виконання роботи розпочинається з вивчення теорії і розрахунку робочих процесів машин, обґрунтованого підходу до вибору параметрів і режимів робочих органів залежно від конкретних умов роботи та осмисленого підходу до тієї чи іншої розрахунковографічної роботи.
Під час виконання роботи студент має звернути увагу на особливості будови, технологічного процесу та умови використання робочих органів, механізмів та сільськогосподарських машин в цілому. При цьому необхідно враховувати технічні рішення, які реалізовані в конструкціях машин і використовуються на сучасній сільськогосподарській техніці.
Для поглибленого вивчення матеріалу по окремих темах з визначення режимів і параметрів сільськогосподарських машин запропоновано задачі, які студенти розв’язують самостійно.
У практикумі наведено методику розв’язання типових задач. Практикум призначений для підготовки бакалаврів напряму
6.100102 “Процеси, машини та обладнання агропромислового виробництва” в аграрних вищих навчальних закладах III–IV рівнів акредитації, а також може бути корисним при виконанні курсових та кваліфікаційних робіт.
3
Т е м а 1. ПРОЕКТУВАННЯ ЛЕМІШНО-ПОЛИЦЕВОЇ
ПОВЕРХНІ КОРПУСА ПЛУГА
Мета роботи: засвоїти методику та побудувати у трьох проекціях лемішнополицеву поверхню корпуса плуга.
Формат листа графічної частини – А1 Рекомендований масштаб – 1:2,5
1.ЗАГАЛЬНІ ТЕОРЕТИЧНІ ПОЛОЖЕННЯ
1.1.РОЗВИТОК ПОВЕРХНІ ПЛОСКОГО КЛИНА В КРИВОЛІНІЙНУ ПОВЕРХНЮ
Плоский двочи тригранний клин деформує скибу лише при підрізуванні й підніманні її на робочу поверхню клина. Надалі скиба переміщується по робочій поверхні клина без деформації. Більш інтенсивної деформації можна досягти тоді, коли скиба при переміщенні вгору потрапляє на робочу поверхню, встановлену під більшим кутом до горизонту.
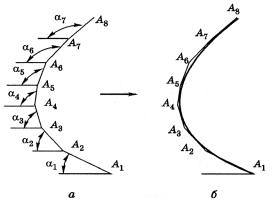
Рис. 1.1. Розвиток простого плоского клина в криволінійну поверхню:
а – утворення багатогранної поверхні; б – побудова криволінійної поверхні
Розглянемо процес, коли скиба при переході з робочої поверхні A1A2 (рис. 1.1,а) плоского двогранного клина, встановленого під кутом α1, потрапляє на поверхню А2А3, яка встановлена під кутом α2 > α1, потім на поверхню А3А4, встановлену під кутом α3 > α2, і т.д. Очевидно, що скиба, переміщуючись по таких поверхнях, про-
4

тягом всієї висоти зазнаватиме деформівної дії. Якщо цю поверхню зобразити плавною криволінійною лінією (рис. 1.1,б), то отримаємо клин із вгнутою робочою поверхнею, який по всій висоті піддаватиме скибу деформівній дії.
Проаналізуємо розвиток плоского тригранного клина в криволінійну поверхню. Як відомо, із трьох характерних кутів α, β і γ тригранного клина, маючи значення двох, легко встановити значення третього.
Якщо робочу грань ABC (рис. 1.2,а) плоского тригранного клина, який установлений під кутом α1 у поздовжньо-вертикальній площині і під кутом β1 – у поперечно-вертикальній площині, на певній висоті переріжемо робочою гранню А1В1С1, для якої α2 > α1 і β2 > β1, то отримаємо робочу поверхню ВВ1С1С. Якщо грань А1В1С1 переріжемо на невеликій висоті гранню A2В2C2, для якої α3 > α2 і β3 > β2, то будемо мати робочу поверхню В1В2С2С1. Якщо
грань A2В2C2 переріжемо гранню A3В3C3, для якої α4 > α3 і β4 > β3, то отримаємо робочу поверхню В2В3С3С2. Так само можна площину A3В3C3 перерізати гранню з більшими кутами α, β і т. д.
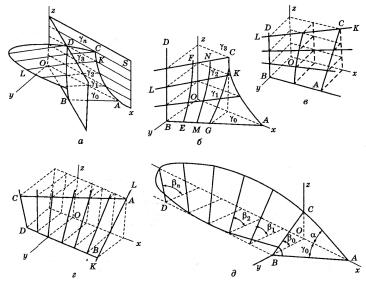
Рис. 1.2. Розвиток косого тригранного клина в циліндричну робочу поверхню:
а – утворення ламаної робочої поверхні; б – побудова робочої циліндричної поверхні
5
У результаті аналізу одержимо ламану робочу поверхню, яка складається з плоских робочих граней зі збільшеними кутами α1 <
< α2 < α3 і β1 < β2 < β3. Якщо лінії СС1С2С3 і BB1B2B3 зобразимо плавними кривими, а відрізки СВ, С1В1, С2В2, С3В3 вважатимемо твірними, то отримаємо криволінійну робочу поверхню (рис. 1.2,б), тобто поверхню, утворену при переміщенні твірної паралельно площині хОу за двома напрямними кривими. Така робоча поверхня має деформівну дію на скибу, що перебуває на ній.
Отримана таким чином лінійна поверхня може бути робочою поверхнею плужного корпуса (лемеша і полиці). Для такої поверхні важливим є те, що вона задовольняє одну з вимог до робочої поверхні плужного корпуса – вимогу лінійності, тобто на ній можна прокласти пряму лінію. Лінійні робочі поверхні менше залипають і їх легше виготовляти.
На плугах загального призначення найчастіше застосовують циліндроїдальні поверхні, а на плугах для оранки зв’язних ґрунтів – поверхні, подібнідоконоїда, гіперболічногопараболоїда чи гелікоїда.
Рис. 1.3. Схеми утворення робочих поверхонь різного типу:
а – циліндроїд; б – коноїд; в – гіперболічний параболоїд із вертикальною напрямною BD; г – гіперболічний параболоїд із горизонтальною напрямною BD; д – гвинтова поверхня
6
Циліндроїдальна поверхня утворюється переміщенням твірної LK (рис. 1.3,а) по напрямній АС, залишаючись паралельною горизонтальній площині хОу, за умови, що кут між нею та поздовжньовертикальною площиною в міру її піднімання змінюється. Якщо кут у з переміщенням твірної залишається сталим, то утворена таким чином поверхня буде циліндричною.
Коноїд є різновидом гвинтової поверхні, яка утворюється при переміщенні твірної LK по кривій напрямній АС (рис. 1.3,б), розміщеній у площині xOz, і по прямій напрямній BD, розміщеній у площині yOz. Характерно, що лінії її перетину EF, MN, GC поперечновертикальними площинами EF, MN, GCє кривими лініями.
Гіперболічний параболоїд є просторовою циліндроїдальною поверхнею, що утворюється при переміщенні твірної LK (рис. 1.3,в) по двох прямих непаралельних напрямних АС і BD. Пряма АС розміщена у поперечно-вертикальній площині, a BD – у площині yOz. Твірна LK під час переміщення залишається у горизонтальному положенні. Характерним для цієї поверхні є те, що вона може бути утворена, якщо твірні АВ і LK взяти за напрямні, а напрямну АС – за твірну (рис. 1.3,г), яка лежить у горизонтальній площині, а напрямна BD – у площині хОу. Твірна LK при переміщенні залишається паралельною площині yOz.
Гелікоїд відрізняється від гіперболічного параболоїда тим, що в нього одна з напрямних є гвинтовою лінією АС (рис. 1.3,д), а інша напрямна BD розміщена в площині хОу. Твірна ВС залишається паралельною площині yOz.
Академік В.П. Горячкін, який досліджував плужні полиці, дійшов висновку, що циліндроїд у загальному вигляді дуже подібний до полиць сучасних плугів, при цьому серед них рідко трапляється чистий циліндр, а ще рідше – коноїд.
1.2. ОСНОВИ ПОБУДОВИ ЛЕМІШНО-ПОЛИЦЕВОЇ ПОВЕРХНІ
На плужних корпусах сучасних плугів застосовують циліндроїдальні робочі поверхні. Залежно від характеру зміни параметрів α, β і γ розрізняють циліндричні, культурні, напівгвинтові і гвинтові робочі поверхні.
Розглянемо побудову циліндроїдальної робочої поверхні плужного корпуса на прикладі культурного і напівгвинтового корпусів.
7
Найвідомішими методами побудови циліндроїдальних поверхонь є методи професорів М.В. Сладкова і М.В. Щучкіна. Метод професора М.В. Сладкова ґрунтується на русі прямої твірної паралельно площині дна борозни по двох напрямних кривих. Одна з них лежить у площині польового обрізу корпуса, а інша – у паралельній їй площині і проходить через кінець лемеша. Професор М.В. Щучкін розробив метод побудови робочої поверхні культурного і напівгвинтового типу, користуючись однією напрямною, яка лежить у площині, перпендикулярній до леза лемеша, і зміною кута у твірної зі стінкою борозни.
Нині найпоширенішим є метод професора М.В. Щучкіна. Відповідно до цього методу будують три проекції робочої поверхні плужного корпуса – поперечно-вертикальну (лобовий контур корпуса), горизонтальну і поздовжньо-вертикальну.
Таблиця 1.1
Варіанти вихідних даних для проектування лемішно-полицевої поверхні корпуса плуга
Варіант |
b, см |
k |
ε |
γ0 |
γmin |
γmax |
|
|
|
|
|
|
|
1 |
30 |
1,5 |
24 |
40 |
38 |
45 |
2 |
30 |
1,65 |
25 |
36 |
34 |
41 |
3 |
30 |
1,7 |
26 |
38 |
36 |
41 |
4 |
35 |
1,5 |
28 |
37 |
35 |
41 |
5 |
35 |
1,65 |
30 |
38 |
36 |
41 |
6 |
35 |
1,7 |
25 |
40 |
38 |
44 |
7 |
35 |
1,6 |
28 |
36 |
34 |
40 |
8 |
40 |
1,5 |
30 |
38 |
36 |
42 |
9 |
40 |
1,6 |
26 |
36 |
34 |
41 |
10 |
40 |
1,7 |
24 |
40 |
38 |
45 |
11 |
30 |
1,55 |
25 |
40 |
39 |
44 |
12 |
30 |
1,6 |
26 |
42 |
41 |
48 |
13 |
30 |
1,7 |
27 |
43 |
41 |
47 |
14 |
35 |
1,55 |
28 |
44 |
42 |
48 |
15 |
35 |
1,6 |
29 |
44 |
43 |
49 |
16 |
35 |
1,5 |
30 |
43 |
41 |
47 |
17 |
40 |
1,5 |
29 |
42 |
40 |
46 |
18 |
40 |
1,6 |
28 |
40 |
38 |
43 |
19 |
40 |
1,65 |
27 |
42 |
40 |
45 |
20 |
35 |
1,55 |
26 |
40 |
38 |
44 |
8
Результатом виконаної роботи є креслення лемішнополицевої поверхні корпуса плуга, виконаного у трьох проекціях. Крім цього, виконуються розрахунки, необхідні для виконання креслень і побудови графіка зміни кута γ.
Під час виконання завдання використовують такі параметри: b – ширина захвату корпуса, см;
k – відношення ширини захвату корпуса до глибини оранки; ε – кут нахилу леза леміша відносно дна борозни; γ0 – кут постановки леза леміша відносно стінки борозни;
γmin – кут постановки грудей полиці і відповідний мінімальному нахилу твірної циліндроїда до стінки борозни;
γmax – кут постановки крила полиці і відповідний найбільшому нахилу твірної циліндроїда до стінки борозни.
Дані для виконання завдань наведено в табл. 1.1.
2. ПОРЯДОК ВИКОНАННЯ РОБОТИ
Відповідно до призначення корпус підрізає шар ґрунту, відділяє його від дна та стінки борозни, розпушує та обертає. Характер виконання зазначених операцій залежить від типу робочої поверхні полиці.
Тип робочої поверхні полиці залежить від різниці між кінцевим та початковим кутами нахилу твірної до стінки борозни
Δγ = γmax – γmin :
Δγ = 0° – циліндрична робоча поверхня; Δγ = 2–7° – культурна робоча поверхня;
Δγ = 7–15° – напівгвинтова робоча поверхня. Леміш та полиця повинні утворювати єдину поверхню, тому
їх проектують як єдине ціле. Існує значна кількість методик графічної побудови робочих поверхонь корпуса плуга. Практично всі вони передбачають утворення поверхні шляхом переміщення у просторі прямої, яка отримала назву твірної. В ґрунтовокліматичних умовах України найбільше поширення отримали корпуси з культурною робочою поверхнею. Для такої поверхні на практиці найчастіше використовують метод за допомогою напрямної кривої (S–S1 ) і закону зміни кута γ0–γmax твірної до стінки боро-
зни (рис. 1.4).
9
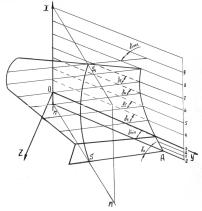
Рис. 1.4.
Схема будови поверхні корпуса
На рис. 1.4 твірні показані у вигляді слідів перетину поверхні корпуса з площинами, що проведені паралельно дну борозни. Методика виконання креслення зводиться до знаходження згада-
них слідів перетину на відповідних проекціях полиці та леміша. Для гарантованого розміщення креслення на форматі необ-
хідно виконати такі вимоги:
#по центру листа провести тонку вертикальну лінію, яка буде позначати стінку борозни;
#на відстані 250 мм від верхнього обрізу листа провести тонку горизонтальну лінію, яку уявимо як дно борозни на фронтальній проекції.
Проектування виконуємо без урахування передплужника. За основу під час проектування приймаємо профіль борозни,
вякий вписується поперечно-вертикальна проекція корпуса.
2.1. ПОБУДОВА ПРОФІЛЯ БОРОЗНИ ТА ПОПЕРЕЧНО-ВЕРТИКАЛЬНОЇ ПРОЕКЦІЇ (ЛОБОВОГО КОНТУРА) КОРПУСА
Профіль борозни залежить від розмірів поперечного перерізу скиби, тобто від ширини захвату b корпуса та глибини оранки a, які знаходяться у співвідношенні b / a = k. Побудову профіля борозни виконуємо в певній послідовності.
1) За основу приймають лінію дна борозни 1–1, на якій обирають точку А, відповідну проекції носка леміша на поперечновертикальну площину. З точки А догори і вліво відкладають у вибраному масштабі відповідно значення глибини оранки а та ширини захвату корпуса b (рис. 1.5). Прямокутник ABCD і буде скибою, з якою взаємодіє корпус плуга під час оранки.
10