

зеленов / УЧЕБ_ПОСОБИЕ_часть_2 / редакт / 14_4 Регулирование скорости измен
.doc14.4 Регулирование скорости асинхронных электроприводов изменением питающего напряжения
При изменении напряжения на статоре АД его механические характеристики меняются так, как это показано на рисунке 14.9 .
К ритическое
скольжение SК не
зависит от величины напряжения сети
и остается неизменным, а максимальный
момент меняется пропорционально квадрату
напряжения.
ритическое
скольжение SК не
зависит от величины напряжения сети
и остается неизменным, а максимальный
момент меняется пропорционально квадрату
напряжения.
К ак
видно из рисунка 14.9, при изменении
напряжения на статоре уменьшается
жесткость механических характеристик,
что дает возможность регулировать
скорость АД в весьма небольшом диапазоне
(даже при вентиляторной нагрузке).
Следует иметь в виду, что значительное
снижение критического момента при
уменьшении напряжения, то есть снижение
перегрузочной способности АД, и малый
диапазон регулирования скорости делает
этот способ регулирования практически
не востребованным.
ак
видно из рисунка 14.9, при изменении
напряжения на статоре уменьшается
жесткость механических характеристик,
что дает возможность регулировать
скорость АД в весьма небольшом диапазоне
(даже при вентиляторной нагрузке).
Следует иметь в виду, что значительное
снижение критического момента при
уменьшении напряжения, то есть снижение
перегрузочной способности АД, и малый
диапазон регулирования скорости делает
этот способ регулирования практически
не востребованным.
Лучшие результаты регулирования скорости получаются, если использовать не короткозамкнутый АД, а двигатель с фазным ротором, в который включено активное или активно-реактивное невыключаемое сопротивление.
Механические характеристики АД в этом случае при вентиляторном характере изменения МС показаны на рисунке 14.10.
Для изменения напряжения на статоре используется тиристорный регулятор, состоящий из двух встречно – параллельно включенных тиристоров в каждой фазе АД и блока импульсно-фазового управления открыванием тиристоров.
Регулирование скорости АД путем изменения напряжения на статоре используется в замкнутых системах электропривода (см. далее разделы 5.5 и 5.6).
А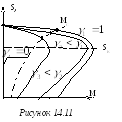 мплитудное
регулирование скорости АД возможно
также и при импульсном изменении
напряжения на статоре. На рисунке 14.11
показаны механические характеристики
для такой схемы регулирования при
различной величине скважности
мплитудное
регулирование скорости АД возможно
также и при импульсном изменении
напряжения на статоре. На рисунке 14.11
показаны механические характеристики
для такой схемы регулирования при
различной величине скважности
![]() (
(
![]() -
период включения напряжения, t0-
период отключения ,
-
период включения напряжения, t0-
период отключения ,
![]()
![]()
![]() -
период коммутации). При
-
период коммутации). При
![]() двигатель работает на
естественной механической характеристике.
двигатель работает на
естественной механической характеристике.
При импульсном регулировании напряжения на статоре АД диапазон регулирования скорости также очень мал, регулирование возможно только вниз (это существенный недостаток).
При электромагнитных переходных процессах, возникающих при включении и отключении обмотки статора, возникают пульсации напряжения и угловой скорости.
14.5 Регулирование скорости асинхронных двигателей в каскадных системах
14.5.1 Принцип работы каскадных систем.
Как уже указывалось
ранее в (14.13 ), потери в АД с фазным ротором
составляют
![]() .
При глубоком регулировании скорости
, то есть при больших величинах скольжения
S, эти потери могут быть
достаточно велики. Рассеяние потерь на
сопротивлениях в цепи ротора существенно
снижает экономические показатели АД.
.
При глубоком регулировании скорости
, то есть при больших величинах скольжения
S, эти потери могут быть
достаточно велики. Рассеяние потерь на
сопротивлениях в цепи ротора существенно
снижает экономические показатели АД.
Аппаратура в роторной цепи должна соответствовать мощности потерь.
Непосредственная передача энергии роторных потерь в сеть переменного тока невозможна из-за отличия частоты тока в сети и роторе АД. Передача энергии потерь (энергии скольжения) возможна, если использовать каскад электромашинных или вентильных устройств.
Системы асинхронного электропривода, в которых полезно используется энергия скольжения, называются каскадными системами АЭП . В таких системах используются схемы включения АД, обеспечивающие передачу энергии скольжения в сеть переменного тока или на вал АД при превращении энергии роторных потерь в механическую энергию.
Регулирование
скорости АД в каскадных установках
основано на введении в цепь ротора АД
добавочной Э.Д.С
![]() ,
- согласно или встречно с Э.Д.С ротора
Е2.
,
- согласно или встречно с Э.Д.С ротора
Е2.
Ток в роторе АД без введения в него добавочной
Э.Д.С.
![]() будет равен
будет равен
![]() ,
(14.14)
,
(14.14)
где Е2Н – Э.Д.С. между кольцами неподвижного ротора ( при S=1).
При введении в
ротор Е![]() этот ток будет равен
этот ток будет равен
 ,
откуда
,
откуда
S =
![]() . (14.15)
. (14.15)
Соотношение (14.15)
показывает возможность регулирования
S (то есть
![]() )
изменением
)
изменением
![]() ,
вводимой в ротор. Действительно
,
вводимой в ротор. Действительно
![]() .
.
Рассмотрим работу АД при нагрузке его постоянным (не зависящим от скорости ) статическим моментом МС.
Если Е![]() = 0 , то ток в роторе АД определяется
в соответствии с (14.14) только Э.Д.С
= 0 , то ток в роторе АД определяется
в соответствии с (14.14) только Э.Д.С
![]() обмотки ротора и параметрами этой
обмотки (Z2). При
введении в цепь ротора добавочной
Э.Д.С. (Е2 - Е
обмотки ротора и параметрами этой
обмотки (Z2). При
введении в цепь ротора добавочной
Э.Д.С. (Е2 - Е![]() )
количество электрической энергии,
выделяемой непосредственно в обмотке
ротора, уменьшается.
)
количество электрической энергии,
выделяемой непосредственно в обмотке
ротора, уменьшается.
Это приводит к
уменьшению тока ротора ( )
и следовательно, к уменьшению
электромагнитного момента, развиваемого
двигателем, который становится меньше
момента сопротивления МС. Двигатель
начинает замедляться. Но при уменьшении
скорости увеличивается скольжение и
ЭДС ротора Е2 = Е2НS,
что в свою очередь приводит к увеличению
тока ротора и момента АД . Когда этот
момент будет равен МС , двигатель
перестанет замедляться. Вновь наступает
установившейся режим, но при меньшей
скорости ротора. Итак, при
увеличении Е
)
и следовательно, к уменьшению
электромагнитного момента, развиваемого
двигателем, который становится меньше
момента сопротивления МС. Двигатель
начинает замедляться. Но при уменьшении
скорости увеличивается скольжение и
ЭДС ротора Е2 = Е2НS,
что в свою очередь приводит к увеличению
тока ротора и момента АД . Когда этот
момент будет равен МС , двигатель
перестанет замедляться. Вновь наступает
установившейся режим, но при меньшей
скорости ротора. Итак, при
увеличении Е![]() , включенной встречно Е2, угловая
скорость АД уменьшится, а при уменьшении
Е
, включенной встречно Е2, угловая
скорость АД уменьшится, а при уменьшении
Е![]() и возрастании Е2 = Е2НS
- Е
и возрастании Е2 = Е2НS
- Е![]() угловая скорость АД увеличится.
угловая скорость АД увеличится.
Соответственно
можно рассмотреть процесс изменения
скорости АД при включении Е![]() с другим знаком, то есть при Е2=
Е2НS + Е
с другим знаком, то есть при Е2=
Е2НS + Е![]() .
При Е
.
При Е![]() = 0 АД будет работать на механической
характеристике, близкой к естественной.
= 0 АД будет работать на механической
характеристике, близкой к естественной.
Энергия скольжения
![]() Р2
= Р1S может быть
возвращена либо в сеть, либо
на вал АД с помощью вспомогательного
двигателя (ВД ).
Р2
= Р1S может быть
возвращена либо в сеть, либо
на вал АД с помощью вспомогательного
двигателя (ВД ).
В соответствии с этим различают два вида каскадных установок с АД :
а) электромеханические каскады (энергия скольжения возвращается на вал АД ) ;
б) электрические каскады (энергия скольжения возвращается в сеть переменного тока), которые в свою очередь подразделяются на вентильно-машинные и так называемые асинхронно-вентильные каскады.
14.5.2 Электромеханический вентильно - машинный каскад
Схема такого каскада показана на рис 14.12.
В этой схеме: CД- сглаживающий
дроссель; BД - вспомогательный
двигатель, Э.Д.С которого, регулируемая
резистором R 1,
является добавочный Э.Д.С. Е
этой схеме: CД- сглаживающий
дроссель; BД - вспомогательный
двигатель, Э.Д.С которого, регулируемая
резистором R 1,
является добавочный Э.Д.С. Е![]() каскадной установки. Баланс мощности
в каскадной установке по рисунку 14.9
(без учета потерь в машинах) можно
представить следующим образом.
Электромагнитная мощность ( Р
каскадной установки. Баланс мощности
в каскадной установке по рисунку 14.9
(без учета потерь в машинах) можно
представить следующим образом.
Электромагнитная мощность ( Р![]() )
равна:
)
равна:

или
P![]() =
Р1S +
P2 =
const , ( 14.16 )
=
Р1S +
P2 =
const , ( 14.16 )
где Р1S
=
![]() -
мощность скольжения, снимаемая с колец
АД в схему каскада;
-
мощность скольжения, снимаемая с колец
АД в схему каскада;
Р2 – полезная мощность на валу АД.
В рассматриваемом
электромеханическом каскаде скорость
асинхронного двигателя регулируется
при постоянной мощности ( в выражении
14.16)
![]() ).
).
П оэтому
иногда вентильно - машинный
электромеханический каскад называют
каскадом постоянной мощности.
оэтому
иногда вентильно - машинный
электромеханический каскад называют
каскадом постоянной мощности.
На рисунке 14.13 показаны механические характеристики АД, включенного в схему электромеханического вентильно- машинного каскада.
С опротивление
якоря ВД и сглаживающего дросселя (даже
при идеальных вентилях, включенных в
роторную цепь) несколько снижают
жесткость механических характеристик.
опротивление
якоря ВД и сглаживающего дросселя (даже
при идеальных вентилях, включенных в
роторную цепь) несколько снижают
жесткость механических характеристик.
Критический момент АД в каскадной установке уменьшается ( по сравнению с критическим моментом на естественной характеристике из-за влияния коммутации анодов роторных вентилей ). Пусковой момент АД на всех регулировочных характеристиках одинаков и не зависит от тока возбуждения iв вспомогательного двигателя ВД.
Это объясняется
тем, что при
![]() добавочная ЭДС ВД также равна нулю.
Выпрямленный ток в цепи ротора
добавочная ЭДС ВД также равна нулю.
Выпрямленный ток в цепи ротора
![]() (14.17)
(14.17)
где КСВ -
коэффициент схемы выпрямления в
цепи ротора АД, для трехфазной мостовой
схемы КСВ = 1,35;
![]() -
суммарное активное сопротивление
роторной цепи, приведенное к цепи
выпрямленного тока. Величина I2
а, следовательно, и пусковой момент
АД при
-
суммарное активное сопротивление
роторной цепи, приведенное к цепи
выпрямленного тока. Величина I2
а, следовательно, и пусковой момент
АД при
![]() и ЕВД = 0 не зависят от тока
возбуждения.
и ЕВД = 0 не зависят от тока
возбуждения.
На рисунке 14.14 показаны механические характеристики каскадной установки. При увеличении тока возбуждения iВ вспомогательной машины ВД возрастает и момент, который передается на вал АД от ВД.
Поэтому критический момент АД в электромеханическом вентильно-машинном каскаде растет с ростом тока возбуждения ВД.
Д иапазон
регулирования скорости в таком каскаде
составляет 2/1.Увеличение диапазона
регулирования скорости в каскадной
установке приводит к неоправданному
увеличению мощности вспомогательной
машины в роторной цепи.
иапазон
регулирования скорости в таком каскаде
составляет 2/1.Увеличение диапазона
регулирования скорости в каскадной
установке приводит к неоправданному
увеличению мощности вспомогательной
машины в роторной цепи.
Пуск электромеханического вентельно-машинного каскада осуществляется следующим образом. Вначале производят обычный реостатный пуск АД (на схеме рис. 14.12 пусковые сопротивления не показаны). При большой скорости, когда АД работает на естественной характеристике, к выпрямителю подключается якорь ВД и отключаются пусковые реостаты. Начинается возбуждение ВД.
Основной недостаток вентильно - машинных каскадов :
-необходимость применения вращающейся коллекторной машины постоянного тока.
14.5.3 Электрические каскадные установки
Н а
рисунке 14.15 показана схема вентильно
– машинного электрического каскада, в
котором энергия скольжения основного
двигателя АД преобразуется в энергию
постоянного, а затем в энергию переменного
тока и передается в питающую сеть. В
вентильно – машинном каскаде по рисунку
14.15 добавочная Э.Д.С. в роторе Е
а
рисунке 14.15 показана схема вентильно
– машинного электрического каскада, в
котором энергия скольжения основного
двигателя АД преобразуется в энергию
постоянного, а затем в энергию переменного
тока и передается в питающую сеть. В
вентильно – машинном каскаде по рисунку
14.15 добавочная Э.Д.С. в роторе Е![]() регулируется изменением тока возбуждения
машины ВД (реостат R1).
регулируется изменением тока возбуждения
машины ВД (реостат R1).
Эта схема практически почти не применяется, так как для преобразования роторных потерь в АД и передаче их в питающую сеть необходим специальный агрегат постоянной скорости из машины ВД и СГ, снижающий общий КПД каскадной установки.
![]()
В современных электрических каскадных установках агрегат постоянной скорости заменяется инвертором, как это показано на рисунке 14.16.
![]()
![]() =Const
=Const
Т акой
каскад называется асинхронно –
вентильным электрическим каскадом. В
асинхронно - вентильном электрическом
каскаде в цепь выпрямленного тока
ротора вводится добавочная ЭДС Едоб,
получаемая регулированием угла
опережения отпирания тиристоров
инвертора И (угла
акой
каскад называется асинхронно –
вентильным электрическим каскадом. В
асинхронно - вентильном электрическом
каскаде в цепь выпрямленного тока
ротора вводится добавочная ЭДС Едоб,
получаемая регулированием угла
опережения отпирания тиристоров
инвертора И (угла
![]() ).Механические
характеристики такой каскадной установки
показаны на рисунке 4.17. Мощность на валу
АД в электрических каскадных установках
).Механические
характеристики такой каскадной установки
показаны на рисунке 4.17. Мощность на валу
АД в электрических каскадных установках
![]()
![]() .
при
.
при
![]() ,
,
![]() .
.
Мощность скольжения
![]() в электрических каскадных установках
возвращается не на вал АД, а в питающую
сеть. Поэтому мощность, забираемая из
сети (
в электрических каскадных установках
возвращается не на вал АД, а в питающую
сеть. Поэтому мощность, забираемая из
сети (
![]() ) :
) :
![]() ( 14.18
)
( 14.18
)
Т аким
образом ,
в электрических
каскадных установках регулирование
скорости происходит при М=Const.
аким
образом ,
в электрических
каскадных установках регулирование
скорости происходит при М=Const.
Диапазон регулирования скорости в электрических каскадных установках невелик и, так же , как и в вентильно - машинных электромеханических каскадах, составляет 2/1.
![]()
Каскадные схемы включения могут использоваться, как и для двигателей в несколько десятков киловатт, так и для нескольких тысяч киловатт (при больших мощностях электропривод с асинхронным каскадом может быть единственно правильным с экономической точки зрения решением).
Недостатком
каскадных установок является сложность
решения вопроса торможения двигателя
в режиме противовключения или в режиме
рекуперации энергии в сеть при скоростях
ниже синхронной (
![]() 0).
0).
Поэтому для торможения АД в каскадных установках используется режим динамического торможения.
В асинхронно
- вентильном каскаде можно достичь
хорошей стабилизации скорости, если в
такой установке использовать отрицательную
обратную связь по скорости и положительную
по выпрямленному току![]() .
.