

Шпоры / шпоры тау / 2006дистанционники / Lekcii / Lekcija №31
.doc
Цифровой И-регулятор
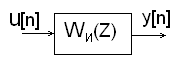 Численное
интегрирование функции u(t)
при нулевых
начальных
Численное
интегрирование функции u(t)
при нулевых
начальных
 условиях
по методу Эйлера:
условиях
по методу Эйлера:
,
![]()
отсюда -рекуррентное уравнение при интегрировании входного воздействия.
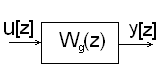
П рименим
дискретное преобразование Лапласа:
рименим
дискретное преобразование Лапласа:

![]() отсюда
отсюда
Цифровой Д-регулятор
Численное дифференцирование функции u(t) при нулевых
начальных условиях методом простой разности

,отсюда

Цифровой ПИД-регулятор

Разностное уравнение регулятора:
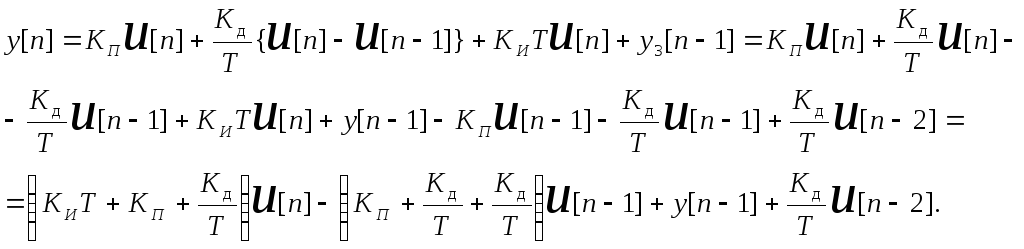
![]() преобразование
разностного уравнения имеет вид
преобразование
разностного уравнения имеет вид
![]()
отсюда
![]()

откуда

где Т-такт квантования сигналов.