

Ohrimenko+ / Barnsley. Superfractals
.pdf210 |
Semigroups on sets, measures and pictures |
wind-up clock is an example of an autonomous system. Autonomous systems occur frequently in the physical sciences; any experiment in physics which can be repeated over and over again to produce the same behaviour, regardless of the date and time, and which may be initialized at any of its states may be represented by such a model. Often the model involves an array of integro-differential equations that incorporate the model assumptions, physical laws, etc. which govern its behaviour. Some of these systems model physical processes that influence the shape and look of the world around us.
Autonomous systems may be associated with conservation laws and invariance properties in fluid dynamics, classical mechanics, electrostatics and so on. We are interested in them because the colour and intensity of the light emitted or reflected by real-world objects moving in an approximately autonomous system, such as waves on the sea or clouds in the sky or the rings of Saturn, finds its way into real-world pictures; we expect to find some sort of trace or record of these systems in invariance properties of parts of pictures under appropriate semigroups of transformations.
Let X denote the set of possible states of an autonomous system. It could describe, for example, the height of a plant, the coordinates and momentum of a particle, the number of sharks and fishermen in a model for interacting species, the positions of the hands on a clockface or possible combinations of colours and forms in a picture that changes with time according to certain rules.
We define Ft : X → X to be the transformation that maps the state of an automous system at time t = 0 to its state at time t ≥ 0. The transformation Ft is sometimes called an evolution operator. Since Ft (Fs (x)) = Ft+s (x) for all x X, it follows that
Ft ◦ Fs = Ft+s for all s, t ≥ 0. |
|
This implies that |
|
({Ft : t ≥ 0}, ◦) |
(3.3.1) |
is a semigroup of transformations. Since this semigroup depends upon a single parameter, t, it is called a one-parameter semigroup.
Let Ft : X → X with t ≥ 0 be an evolution operator, let x X and let O(x) be the orbit of x; see Definition 3.3.8 below. When X R2 the set of orbits of an autonomous system may provide what is called a phase portrait of the system. We think of a phase portrait as being a picture, maybe in black and white, showing the orbits of many different points simultaneously. We notice that
Ft (O(x)) = Ft ({Ft |
(x) : t ≥ 0}) = {Ft |
(x) : t ≥ t} O(x) for all t ≥ 0. |
|||||||||
Now let X |
0 |
|
|
|
0 |
|
|
|
|
0 . Then |
|
|
|
X and define T |
(X ) |
= {O |
(x) : x |
|
X |
} |
|
||
|
|
|
|
|
|
||||||
|
|
|
|
|
Ft (T (X0)) T (X0). |
|
|
(3.3.2) |
|||
3.3 Semigroups of transformations |
211 |
So an autonomous system yields a semigroup of transformations, Equation (3.3.1), and a collection of sets, Equation (3.3.2), each of which is mapped into itself by every transformation of the semigroup. We can think of some phase portraits as being pictures that are invariant under semigroups of transformations.
E x e r c i s e 3.3.7 Let X = R2 and (x, y) = (x(t), y(t)) R2 evolve according to the pair of differential equations
d x |
= −αy, |
dy |
= β x for all t ≥ 0, |
(3.3.3) |
dt |
dt |
subject to the initial condition (x(0), y(0)) = (x0, y0), where α, β > 0 and (x0, y0) is any point in R2. Show that the corresponding evolution operator Ft : R2 → R2 is defined by the 2 × 2 matrix
|
|
|
|
|
|
|
|
|
|
|
|
α |
|
|
|
|
|
|
|
|
|
|
|
cos √αβt |
− |
|
sin |
√αβt |
|
|
|||||||||||||
|
β |
|
|||||||||||||||||||
Ft = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
(3.3.4) |
|
β |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
sin |
√ |
|
t |
cos √ |
|
t |
|
|
||||||||
|
|
|
|
αβ |
αβ |
|
|||||||||||||||
|
|
|
|
|
|||||||||||||||||
|
|
|
α |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Verify that Ft · Fs = Ft+s . Show that, for all points (x, y) on any orbit of the system,
β x2 + αy2 = constant. |
(3.3.5) |
Describe subsets of R2 that are mapped into themselves by all transformations of the semigroup.
Orbits of semigroups
D e f i n i t i o n 3.3.8 An orbit of a semigroup S(X) is a subset of X of the form
O(x) = {x} { f (x) : f S(X)}
for some x X. O(x) is called the orbit of the point x. A semigroup is said to be discrete iff the orbit O(x) X consists of isolated points for all x X. A semigroup is said to be continuous iff, for any given x X, there is a continuous function f : [0, ∞) → X such that the orbit O(x) can be written in the form O(x) = { f (t) : t [0, ∞)}.
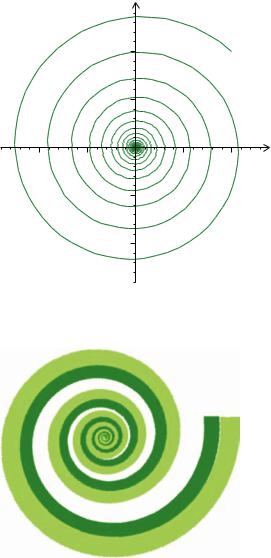
An example of an orbit O(x) of a point x under a continuous semigroup is illustrated in Figure 3.10. The semigroup of transformations is { fθ : θ [0, ∞)}, where fθ : R2 → R2 is defined by
fθ (x, y) = xr 2θ cos θ − yr 2θ sin θ , xr 2θ sin θ + yr 2θ cos θ . |
(3.3.6) |
212 |
Semigroups on sets, measures and pictures |
|
|
y |
|
|
|
|
1 |
|
|
|
|
0.5 |
|
|
−1 |
−0.5 |
0.5 |
1 |
x |
|
|
−0.5 |
|
|
|
|
−1 |
|
|
Figure 3.10 Orbit of the point (1, 1) under the continuous semigroup of transformations defined in Equation (3.3.6).
Figure 3.11 Example of a picture that is invariant under a continuous semigroup of transformations.
In the figure, r = 0.975 and x = (1, 1). In this case the orbit is actually invariant under the semigroup, that is,
O(x) = { fθ (O(x)) : θ [0, ∞)}.
See also Figure 3.11.
A visual example of an orbit of a semigroup is the set of points defined by the tips of the green leaves in Figure 3.3. Clearly in this case we are dealing with a discrete semigroup. See also Figure 3.12.
3.3 |
Semigroups of transformations |
213 |
E x e r c i s e 3.3.9 Let α |
R and let fα : R → R be defined by |
fα (x) = α · x. |
Show that { fα : α R} is a continuous semigroup and that { fα : α Z} is a discrete semigroup.
E x e r c i s e 3.3.10 Let r = 0.99. For θ [0, ∞) define |
fθ : R2→ R2 by |
||||
( fθ (x, y))T |
= |
r θ cos θ |
−r θ sin θ |
|
x . |
|
r θ sin θ |
r θ cos θ |
y |
||
Sketch the orbit of the point (1, 1) under the semigroup of transformations { fθ :
θ [0, ∞)}.
Consider the IFS semigroup S{ f }(X) generated by a single transformation f : X → X. We define f ◦0(x) = x for all x X, f ◦1 = f and f ◦(n+1) = f ◦ f ◦n
for n = 1, 2, 3, . . . Then
S{ f }(X) := { f ◦n : n = 0, 1, 2, . . . }.
Clearly
f ◦n ◦ f ◦m = f ◦(n+m) for all m, n = 0, 1, 2, . . .
In this case the orbit O(x) of the point x X under the semigroup S{ f }(X) is
O(x) = { f ◦n (x) : n = 0, 1, 2, . . . }.
Notice that, knowing the IFS, we can treat this orbit as a sequence.
Suppose that the semigroup S{M}(R2) is generated by a linear transformation M : R2→ R2 represented by the matrix M. Then, since
( f ◦n (x, y))T = Mn x , y
it follows that
S{M}(R2) = {Mn : n = 0, 1, 2, . . . }
where M0 := I , the identity matrix.
E x e r c i s e 3.3.11 Plot the orbit of the point (1, 1) R2 under the semigroup of transformations S{M}(R2), where M is the linear transformation represented by
M = |
0.9 |
0.1 |
|
0.2 |
0.3 . |
|
|
Is this semigroup discrete? |
|
|
|
Now consider the orbit of the |
point |
x X under the IFS semigroup |
|
S{ f1, f2,..., fN }(X). We notice that |
|
|
|
S{ f1, f2,..., fN }(X) = fσ : σ { |
1,2,...,N } |
||
214 |
|
|
|
Semigroups on sets, measures and pictures |
|||||||||||||
where fσ : |
= |
fσ |
1 ◦ |
fσ |
2 ◦ · · · ◦ |
|
fσ |
|σ | |
for all σ |
|
|
|
, |
and we define f : |
|||
X → X by |
|
|
|
|
|
|
|
{1,2,...,N } |
|
|
|||||||
f (x) = x for all x X. It follows that |
|
|
|
||||||||||||||
|
|
|
|
|
O(x) = fσ (x) : σ { |
1,2,...,N } . |
|
|
|||||||||
This provides us with an addressing function φ : { |
1,2,...,N } |
→ O(x) defined by |
|||||||||||||||
|
|
|
|
φ(σ ) |
= |
f |
σ |
(x) |
for all σ |
|
|
|
|
, |
|||
|
|
|
|
|
|
|
|
|
|
{1,2,...,N } |
|
||||||
for each x X. When the IFS is contractive this addressing function can be extended continuously to {1,2,...,N } {1,2,...,N }, as described in the following theorem.
T h e o r e m 3.3.12 Let X be a complete metric space. Let the transformations fn : X → X be contractions, that is, strictly contractive functions, for n = 1, 2, . . . , N where N ≥ 1 is an integer. Let A denote the attractor of the IFS {X; f1, f2, . . . , fN }. That is, A is the unique compact nonempty set that obeys
A = f1(A) f2(A) · · · fN (A).
Let x X and let O(x) denote the orbit of x under the IFS semigroup. Then there is a continuous transformation
φ : {1,2,...,N } {1,2,...,N } → O(x) A,
defined by
|
φ(σ ) |
= |
fσ (x) |
|
|
σn (x) |
when σ { |
1,2,...,N }, |
|
|
|
||||
|
|
lim fσ1σ2 |
··· |
when σ |
= |
σ1 |
σ2 |
· · · |
|
1,2,...,N |
. |
||||
|
|
|
n |
→∞ |
|
|
|
|
{ |
} |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P r o o f The underlying topology is the natural topology on the code space |
||||||||||||||
{ |
1,2,...,N } {1,2,...,N }, which we discussed at length in Chapter 1. The main points |
||||||||||||||
to demonstrate are that lim f |
σ1σ2···σn |
(x) exists and that the resulting function φ is |
|||||||||||||
|
|
|
|
n→∞ |
|
|
|
|
|
|
|
|
|
||
continuous. Both follow from the contractivity of the functions f1, |
f2, . . . , fN and |
the completeness of the space X. See [48], Theorem 3.1(3). |
|
E x e r c i s e 3.3.13 Prove Theorem 3.3.12. |
|
3.4 Orbits of sets under IFS semigroups
D e f i n i t i o n 3.4.1 the orbit of the set C by
Let S(X) be a semigroup and let C X with C = . Then under the semigroup S(X) is the set of subsets of X defined
O(C) = {C} { f (C) : f S(X)}.

3.4 Orbits of sets under IFS semigroups |
215 |
Figure 3.12 What is the orbit of the top left corner of the second largest frame in this picture, under the semigroup of transformations implied by this picture?
Notice that O(C) is a set of sets of points. We will write
P = O(C)
to denote the union of all the sets in the orbit O(C). We call P = O(C) the orbital set associated with the semigroup S(X) acting on the set C.
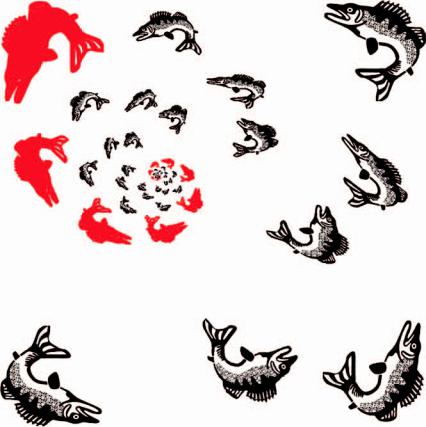
Orbits of sets under semigroups of transformations are illustrated in Figures 3.13–3.16 and 3.18. Notice that the sets in the orbits may have nonempty intersections or they may all be separated from one another. Notice too that there is no requirement that the set C be connected; for example, C could be the union of the fish in the four corners of Figure 3.13.
When X is a ‘flat’ space such as R2 we think of P as a black-and-white picture. The following theorem says that this picture is the union of transformed copies of itself together with the set C. In order to describe this picture, we need to know only C and the set of transformations that generate the IFS. In this context we sometimes call C a condensation set; see for example [9] or [46]. We will also, later, refer to condensation pictures and condensation measures. Be careful not to confuse ‘condensation set’ with ‘the set of condensation points of a set’. The latter refers, in other texts, to an unrelated concept.
T h e o r e m 3.4.2 Let O(C) denote the orbit of a nonempty subset C of X under the IFS semigroup S{ f1, f2,..., fN }(X). Let P = O(C). Then P obeys the
216 |
Semigroups on sets, measures and pictures |
Figure 3.13 Some sets in the orbits of each of the four sets represented by the fish at the four corners, under an IFS semigroup generated by a single projective transformation. One orbit is marked in red. Can you identify, in blue, sets in the orbit of the fish in the bottom left corner?
following equality, known as a self-referential equation:
P = C f1(P) f2(P) · · · fN (P). |
(3.4.1) |
P r o o f We have
C f1(P) f2(P) · · · fN (P)
= C |
|
fn ( O(C)) |
|
n |
|
||
= C |
n |
fn { fσ (C) : σ {1,2,...,N }} |
|
|
|
|
|
= C fσ (C) : σ {1,2,...,N }, |σ | ≥ 1 = P.

3.4 Orbits of sets under IFS semigroups |
217 |
Figure 3.14 Two different semigroup tilings of orbital sets generated by a single projective transformation f acting on a condensation set C , the leafy spring at the centre of the figure. The intersection of any filled rectangle that does not meet C with the orbital picture is the image, under this transformation, of the intersection of a filled quadrilateral with the orbital picture.
Theorem 3.4.2 says that the orbital set P is a fixed point of the transformation FC : S(X) → S(X) defined by
FC (B) = C f1(B) f2(B) · · · fN (B)
for all B S(X), and that
O(C) = O(P).
When the underlying space X is a compact metric space, C is compact and the IFS consists of strictly contractive transformations, we have FC (H(X)) H(X), where H(X) is the space of nonempty compact subsets of X. In this case, if we restrict FC to H(X) then it becomes a strict contraction with respect to the Hausdorff metric. In this case, as in Theorem 2.4.15, the orbital set P is unique in H(X). Moreover, this unique fixed point depends continuously on the transformations in the IFS and on the condensation set C. In other words, in this strictly contractive case, if
218 |
Semigroups on sets, measures and pictures |
you change the IFS slightly and the set C by a small amount, as measured by the Hausdorff metric, then the orbital picture P will change only a little.
This continuity property is useful in image-modelling applications, where one seeks a set C and an IFS such that the set of points in the orbit of the IFS semigroup acting on the set C is an approximation, perhaps an elegant one, to a given set. For more on this, see Chapter 4.
D e f i n i t i o n 3.4.3 Let S{ f1, f2,..., fN }(X) be an IFS semigroup. If C X is nonempty and such that fσ (C) ∩ fυ (C) = whenever σ, υ {1,2,...N } with σ = υ then the orbit of C is called an IFS semigroup tiling of the set O(C), and each
set fσ (C), for σ {1,2,...N }, is called a semigroup tile. In this case σ is called the address of the tile fσ (C). We say that the semigroup, acting on C, generates
the semigroup tiling.
Examples of semigroup tilings of sets are illustrated in Figures 3.13–3.15, 3.17, and 3.18. Notice that the object tiled need not be two dimensional – it is a fractal in Figure 3.16. The transformations may not be one-to-one. The tiles may be of diverse sizes and shapes. Many pictures in this book contain IFS semigroup tilings. Polygon tilings of some attractors of IFSs for contractive affine maps have been documented by Fathauer [36]. He refers to these tilings as fractal tilings.
The following property is quite a natural one: at least, I have often encountered situations where it applies when considering IFS semigroups of contractive transformations.
D e f i n i t i o n 3.4.4 Let S{ f1, f2,..., fN }(X) be an IFS semigroup and C X be a nonempty set. Then the orbit O(C) is said to be layered iff
∞
F◦n (P) = ,
n=1
where P = O(C) is the associated orbital set and F : S(X) → S(X) is defined by
F(B) = f1(B) f2(B) · · · fN (B) for all B in S(X).
An orbit is layered, roughly speaking, if the ‘limit set’ of the sequence of sets {F◦k (P) : k = 1, 2, 3, . . . } does not intersect P.
E x e r c i s e 3.4.5 |
Let C R2 denote |
|||||||
Let f1 : |
R2 |
→ |
R2 |
be the |
similitude f |
(x |
||
|
|
|
1 |
1 |
1 |
|||
be the similitude f2(x, y) = ( |
2 x + 1, 2 |
|||||||
semigroup {R2; f1, f2} is layered.
the circle of radius 1 centred at the origin.
, y) = ( 12 x, 12 y + 1) and let f2 : R2 → R2 y). Show that the orbit of C under the IFS

3.4 Orbits of sets under IFS semigroups |
219 |
Figure 3.15 Two semigroup tilings generated by an IFS semigroup with N = 2. The regular tiling on the right continues onwards to the right and downwards without limit, but the tiling on the left approaches the green canopy, the attractor of the IFS.
Figure 3.16 This shows an IFS semigroup tiling and addresses for some of the tiles. The condensation set, with address , in green at the top left, is itself a fractal set. Successive generations of tiles are smaller and smaller. The semigroup orbit in this case is actually layered, see Definition 3.4.4. The attractor of the IFS, the limit set of the tiling, shown in blue, is not part of the tiling but the tiles approach it arbitrarily closely.