

Розанов учебник(ЭЭА) / GLAVA_3
.pdfà ë à â à ò ð å ò ü ÿ
ЭЛЕКТРОМЕХАНИЧЕСКИЕ АППАРАТЫ АВТОМАТИКИ
К электромеханическим аппаратам автоматики относятся электромеханические реле, датчики и различ- ные исполнительные устройства (электромагнитные
клапаны, преобразователи, муфты, подвесы, опоры), командная аппаратура (конечные и путевые выключатели, поворотные переключатели и др.).
3.1. ЭЛЕКТРОМЕХАНИЧЕСКИЕ РЕЛЕ
Электрическое реле – это коммутационное устройство, предназначенное производить скачкообразные изменения в управляемых цепях при заданных значениях воздействующих на него электри- ческих величин.
Электрические реле подразделяются на два класса: электромеханические реле и статические электрические реле.
Электромеханическое реле – электрическое реле, работа которого основана на использовании относительного перемещения его элементов.
Статическое электрическое реле – электрическое реле, принцип работы которого не связан с использованием относительного перемещения его элементов.
Электрические реле в основном предназначены для коммутации цепей управления силовых аппаратов (например, цепей обмоток электромагнитного контактора), суммирования и размножения сигналов, сигнализации, связи и пр.
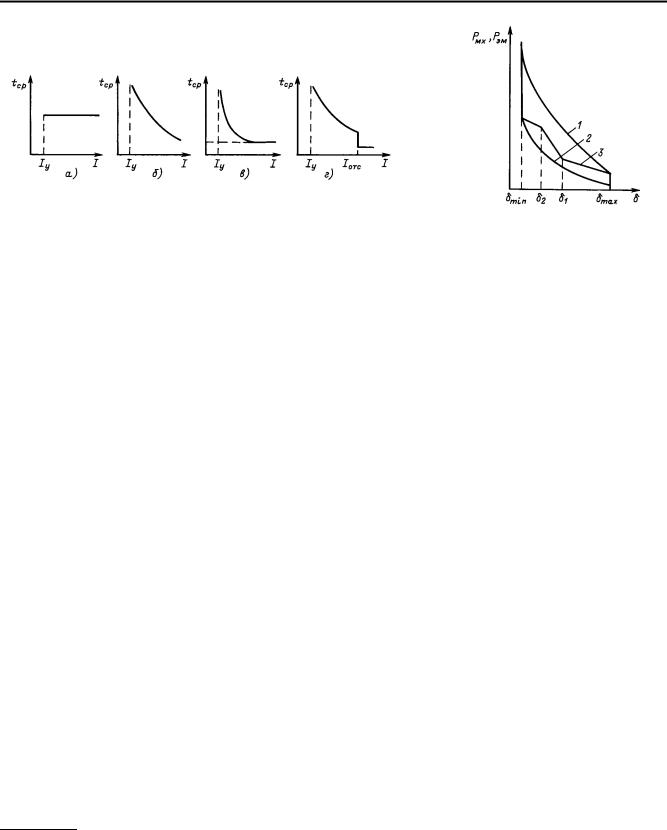
Для суждения о работе реле используется понятие ”характеристика управления” (рис. 3.1). Она имеет релейный характер: скачкообразное увеличение выходной величины Y при некотором зна- чении входной электрической воздействующей величины X (ток, напряжение, частота и т.п.) и такое же скачкообразное уменьшение выходной величи- ны, но уже при другом значении входной величины [5, 29, 41]. При всех остальных значениях воздействующей входной величины выходная величина не меняется или изменяется незначительно.
Электромеханические реле являются наиболее часто встречающимися на практике электрическими реле. K ним относятся электромагнитные, магнитоэлектрические, индукционные, электротепловые, пьезоэлектрические, электро- и ферродинамические, магнитострикционные, вибрационные, электретные и др. реле. Особое место среди них занимают герконовые реле (реле с магнитоуправляемыми герметизированными контактами).
Рис. 3.1. Примеры характеристик управления аппаратов релейного действия:
à,á,â,ä – электромеханических; ã – статических электрических; à,á,ã,ä – одностабильных; â – двустабильных; à,á,ã – максимальных; ä – минимальных; à,ã,ä – работающих на замыкание; á – работающих на размыкание;
Xñð – параметр срабатывания; Xâ – параметр возврата (отпускания);
Xð – рабочий параметр; Ymax, Ymin – максимальное и минимальное значения выходного параметра
84

§ 3.1. Электромаханические реле
Простейшее электромеханическое реле изображено на рис. 3.2 при нулевом значении входной величины X – òîêà Iâõ в обмотке 1. С увеличением тока Iâõ, при определенном его значении, якорь 10 отойдет от упора 11 и притянется к сердечнику 12. B процессе движения якоря его верхний конец, действуя через толкатель 9, дополнительно изогнет плоскую контактную пружину 6 вверх до соприкосновения ее контакт-детали 8 с контакт-деталью 7 контактной пружины 5, которая затем отойдет вверх от упора 4. В результате по выходной цепи после окончания переходного процесса будет протекать ток Iâûõ – выходная величина Y. При дальнейшем увеличении входного тока выходной ток практически не изменится. Если теперь уменьшать входной ток, то при некотором его значении механическая сила изогнутых пружин преодолевает электромагнитную силу притяжения якоря к сердечнику – контакт-детали разомкнутся и выходная цепь обесточится. Под входной X и выход-
Рис. 3.2. Простейшее электромагнитное реле с одним замыкающим контактным узлом:
1 – обмотка; 2 – ÿðìî; 3 – изоляционная планка; 4, 11 – упоры; 5, 6 – контактные пружины; 7, 8 – контакт-детали; 9 – толкатель; 10 – якорь; 12 – сердечник
íîé Y величинами такого аппарата можно подразумевать и другие величины, например напряжение на обмотке и напряжение на сопротивлении нагрузки Rí.
3.1.1.ОСНОВНЫЕ ТЕРМИНЫ И ОПРЕДЕЛЕНИЯ
Âзависимости от области применения электровующих величин. Электромеханические логичес-
механические реле предназначаются для промышленной автоматики, защиты электроэнергетических систем, радиоэлектроники и др.
Наиболее массовым видом продукции первой области являются реле управления, предназначенные для управления и защиты электроприводов.
Для реле второй области применения, охватывающей электроcтанции, электрические сети и системы, часто используют более короткий термин –
реле защиты.
Специфика областей применения определяет огромное разнообразие реле по принципу действия и конструктивным исполнениям.
Электромеханические реле реагируют на такие электрические параметры, как ток, напряжение, мощность, электрическое сопротивление цепи (активное, реактивное, полное) и т. п.
B зависимости от выполняемых функций электромеханические реле подразделяются на логи- ческие è измерительные.
Электромеханическое логическое реле предназна- чено для срабатывания и отпускания (возврата в исходное состояние) при изменении входной воздействующей величины, ненормируемой по точ- ности. Входная воздействующая величина электромеханического логического реле – это электрическая величина, на которую реле реагирует, если она воздействует на реле при заданных условиях. Существуют рекомендуемые стандартами номинальные значения и пределы рабочего диапазона воздейст-
кие реле подразделяются на промежуточные, указательные и реле времени. Промежуточное реле предназначено для размножения и усиления поступающего к нему сигнала; указательное реле – для указания срабатывания и возврата других коммутационных аппаратов ; реле времени – для создания выдержки времени.
Электромеханическое измерительное реле предназначено для срабатывания с определенной точ- ностью при заданном значении или значениях характеристической величины. Характеристическая величина электромеханического измерительного реле – это электрическая величина, нормируемая по точности и определяющая функциональный признак реле. Для ее образования необходимы одна или несколько входных воздействующих величин электрического измерительного реле.
Для пояснения |
разницы между логическим |
и измерительным |
реле сравним два реле, имею- |
щих одну входную воздействующую величину – электрическое напряжение. Логическое реле предназначено для срабатывания и возврата при дискретном изменении входной воздействующей величины от логического нуля до логической единицы (”íåò” – ”да”). В данном примере это означает следующее: напряжение не подано или подано на вход реле. В отличие от логического реле на измерительное реле напряжение подается постоянно, т. е. входная величина измеряется непрерывно. Напряжение для него не только входная воздей-
85

Гл. 3. Электромеханические аппараты автоматики
ствующая величина, но и характеристическая вели- чина.
Максимальное электромеханическое реле – это измерительное электрическое реле, срабатывающее при значениях характеристической величины, больших заданного значения. Минимальное электромеханическое реле – измерительное реле, срабатывающее при значениях характеристической величины, меньших заданного значения.
Уставка по характеристической величине –
заданное значение характеристической величины, при котором реле должно сработать. Измерительные реле бывают следующих видов: со шкалой уставок, по которой в реле вводится уставка по характеристической величине; без шкалы, но с возможностью изменения уставки; с фиксированной настройкой на определенное значение характеристической величины.
На вход измерительного реле (в отличие от логического) одновременно могут подаваться несколько входных воздействующих величин. Например, на входы реле мощности подаются ток и напряжение. Обе эти величины формируют одну характеристическую величину – мощность, которая вводится в реле по шкале уставок. У измерительных реле с одной входной воздействующей величиной характеристическая величина совпадает с последней. Исключение составляет реле частоты, в котором характеристической величиной является частота, а входной воздействующей – напряжение.
Срабатывание электромеханического реле – выполнение реле функции, для которой оно предназначено. Возврат электрического реле – переход реле в исходное состояние из состояния, в котором оно находится после срабатывания.
Значение параметра срабатывания (возврата) электромеханического реле – Xñð (Xâ ) определяется значением входной воздействующей или характеристической величины, при котором реле соответственно срабатывает или возвращается при заданных условиях (см.рис. 3.1).
Отношение значения параметра возврата к зна- чению параметра срабатывания называется коэффициентом возврата (kâ = Xâ ⁄ Xñð). Для максимальных реле kâ < 1 (ñì.ðèñ. 3.1,à,á,ã); для минимальных kâ > 1 (ñì.ðèñ. 3.1,ä). Чем ближе к единице значение коэффициента возврата, тем в более узких пределах реле будет осуществлять контроль входного параметра.
Для надежного срабатывания логического реле рабочее значение Xð входной воздействующей ве-
личины выбирается с некоторым запасом (см.рис. 3.1,à). Коэффициент запаса по входной воздействующей величине определяется отношением kç = Xð ⁄ Xñð.
В зависимости от того, возвращается ли реле, изменившее свое состояние под воздействием входной воздействующей или характеристической вели- чины в прежнее состояние после устранения этого воздействия, реле подразделяются на одностабильные (ñì.ðèñ. 3.1,à,á,ã,ä) è двустабильные (ðèñ. 3.1, â). Одностабильные реле возвращаются, а для возврата двустабильных реле необходимо приложить другое воздействие.
Существуют электромеханические реле (как логические, так и измерительные) с нормируемым временем (нормируется по точности одного времени или нескольких времен, характеризующих реле) и с ненормируемым временем. Заданное зна- чение выдержки времени, при котором реле с нормируемым временем должно сработать при определенных условиях, называется уставкой выдержки времени.
Промежуточные и указательные логические реле имеют ненормируемое время, а реле времени – нормируемое. Последние реле могут быть следующими: со шкалой уставок выдержки времени; с регулируемой выдержкой времени, не имея шкалы уставок; с фиксированной настройкой на определенную выдержку времени.
Измерительное реле с нормируемым временем может быть с независимой выдержкой времени
(выдержка времени практически не зависит от зна- чения характеристической величины в заданных пределах ее изменения), с зависимой выдержкой времени (выдержка времени заданным образом изменяется в зависимости от значения характеристи- ческой величины) и с ограниченно зависимой выдержкой времени. Íà ðèñ. 3.3,à–â приведены три вида характеристик зависимости времени срабатывания tñð îò òîêà I в максимальном реле тока. Иногда зависимость выдержки времени от тока имеет ступеньку (рис. 3.3,ã), которая свидетельствует о резком снижении времени срабатывания реле при токах, равных или больших так называемого тока отсечки” Iîòñ.
 ”двустабильных электромеханических реле фиксация состояния осуществляется чаще всего при помощи магнитных или механических блокировок.
По роду управляющего тока реле подразделяются на реле постоянного и переменного тока. У некоторых электромагнитных реле изменение рода тока управления требует только замены катушки и изредка – других деталей. Такие реле называются
универсальными.
Электрические реле постоянного тока, функционирование которых зависит от полярности их входной воздействующей величины, называются
поляризованными.
86
§ 3.1. Электромаханические реле
Рис. 3.3. Виды зависимости времени срабатывания реле максимального тока от |
|
характеристической величины: |
|
à – независимая выдержка времени; á – зависимая выдержка времени; |
Рис. 3.4. Согласование статических тяговых |
â – ограниченно зависимая выдержка времени; ã – зависимая выдержка времени |
(1, 2) и механической (3) характеристик реле, |
с отсечкой |
изображенного на рис. 3.2 |
Проводящая часть цепи контакта внутри реле, электрически изолированная от других частей, если цепь контакта разомкнута, называется контактным элементом. На рис. 3.2. один из контактных элементов представляет собой совокупность деталей 5 è 7, а второй – деталей 6 è 8. Часть контактного элемента, при помощи которого непосредственно происходит замыкание или размыкание контакта электрического реле, называется контакт-деталью (детали 7 è 8 ).
Совокупность контактных элементов с изоляцией, которые в результате их относительного движения обеспечивают замыкание или размыкание цепи контакта, предоставляют собой контакт электрического реле* [по стандарту международной электротехнической комиссии (МЭК) – контактный узел] (например, на рис. 3.2. контактный узел представляет собой совокупность деталей 3, 5, 6, 7 и 8).
Функционирование реле зависит не только от входных воздействующих величин, но и от условий работы. Условия работы определяются влияющими величинами и влияющими факторами, способными изменить хотя бы одну из заданных характеристик реле (срабатывание, возврат, точность и т. д.).
При разработке электромеханических реле проводится согласование их тяговых и механических характеристик. Тяговая характеристика электромагнитного реле, – это например, зависимость электромагнитной силы Pýì или электромагнитного момента Mýì, действующей (действующего) на якорь и приведенной (приведенного) к рабочему зазору δ (см.рис. 3.2.), от значения этого зазора (от угла α поворота якоря).
* Часто для краткости изложения используется термин ”контакт”.
При срабатывании реле электромагнитная сила (или электромагнитный момент) являются движущей, при возврате – противодействующей движению якоря. Сила трения оказывает противодействие как при срабатывании, так и при возврате. Силой трения пренебрежем.
Тяговая характеристика [Pýì = f (δ) èëè Mýì = f (α) ] при медленном перемещении якоря, если можно пренебречь изменением тока в обмотке, называется статической, а при быстром – динамической.
Под механической характеристикой [Pìõ = f (δ) èëè Mìõ = f (α) ] электромагнитного реле обычно
понимают зависимость суммарной силы (момента) за вычетом электромагнитной силы (электромагнитного момента), действующей (действующего) на якорь и приведенной (приведенного) к рабочему зазору от значения этого зазора (от угла поворота якоря).
Механическая характеристика при медленном перемещении, когда можно пренебречь силами инерции движущихся масс, называется статической механической характеристикой (далее просто механической).
При срабатывании механические силы, как правило, противодействуют движению. Поэтому механическую характеристику иногда называют противодействующей. Однако при возврате механические силы являются движущими, поэтому термин ”противодействующая” менее удачен чем ”механическая”.
Для нормальной работы реле его динамические тяговые и механические характеристики при срабатывании и возврате должны быть согласованы.
Часто из-за сложности определения динамических характеристик ограничиваются согласованием только статических характеристик. Пример такого согласования дан на рис. 3.4 для реле, схематично
87
Гл. 3. Электромеханические аппараты автоматики
изображенного на рис. 3.2. На рис. 3.4 статическая тяговая характеристика 1 при МДС обмотки Fñð, соответствующей срабатыванию реле, проходит выше, а статическая тяговая характеристика 2 при МДС обмотки Fâ, соответствующей возврату реле, – ниже чем статическая механическая характеристика 3 ïðè
всех зазорах δ (от δ max äî δ min ). Зазор δ 1 соответствует замыканию контакт-деталей 7 è 8 (см. рис.3.2), а зазор δ 2 – отходу пружины 5 вверх от упора 4.
Подробнее согласование тяговых и механических характеристик рассмотрено в специальной литературе [например, 5, 29, 41].
3.1.2. ЭЛЕКТРОМАГНИТНЫЕ РЕЛЕ
Электромагнитные реле – это электромехани- ческие реле, функционирование которых основано на воздействии магнитного поля неподвижной обмотки с током на подвижный ферромагнитный элемент, называемый якорем. Электромагнитные реле подразделяются на собственно электромагнитные (иногда используется термин ”нейтральные электромагнитные”), реагирующие только на зна- чение тока в обмотке, и поляризованные электромагнитные, функционирование которых определяется как значением тока, так и его полярностью.
Электромагнитные реле для промышленных автоматических устройств. Эти реле занимают промежуточное положение между сильноточными коммутационными аппаратами (контакторами, мощной электронной коммутационной техникой) и слаботочной аппаратурой. Наиболее массовым видом этих реле являются реле управления электроприводами (реле управления), а среди них – промежуточные реле. Для реле управления характерен повторно-кратковременный и прерывисто-продол- жительный режимы работы с числом коммутаций до 3600 в час при высокой механической и коммутационной износостойкости (последняя – до 105÷ 6.106 циклов коммутаций).
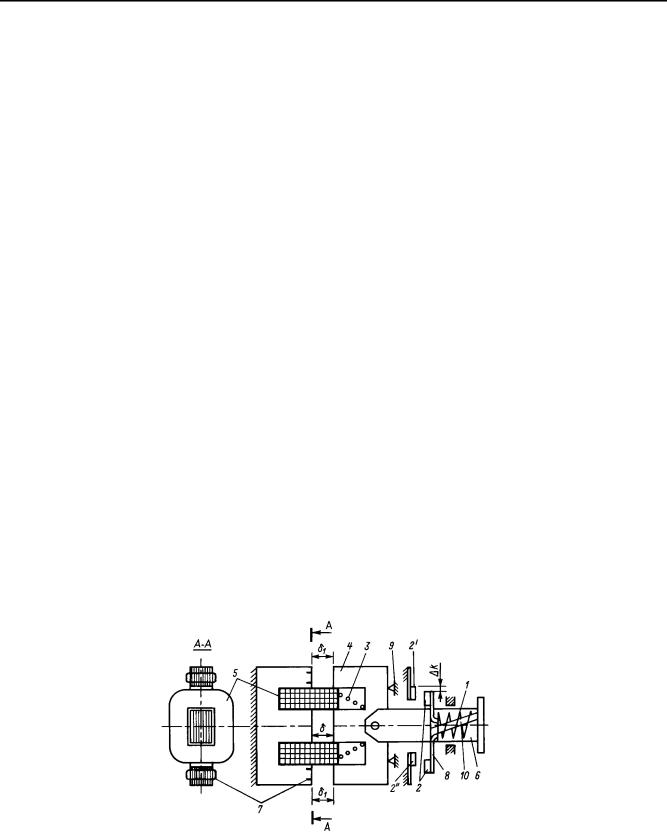
Примером промежуточных реле является реле серии РПЛ. Эти реле применяются для коммутации цепей постоянного тока с напряжением до 440 В
и переменного тока частотой 50 и 60 Гц с напряжением до 660 В. Допустимый ток в продолжительном режиме – 10 А. Выпускаются реле двух модификаций: РПЛ-1 с питанием входной цепи на переменном токе и РПЛ-2 с питанием на постоянном токе. Конструктивно они отличаются друг от друга только магнитной системой. Рассмотрим работу реле РПЛ-1, схематично изображенного на рис. 3.5. При подаче напряжения на обмотку 5 в магнитопроводе возникает магнитный поток, создающий электромагнитную силу, которая, преодолевая противодействие возвратной пружины 3, перемещает якорь 4 от упоров 9 таким образом, чтобы уменьшить рабочие зазоры δ и δ 1 магнитной системы. С якорем через тягу 6 и контактную пружину 1, расположенную на направляющей 10, связан контактный мостик 8 с двумя контакт-деталями 2. При некотором положении якоря последние соприкасаются с неподвижными контакт-деталями 2 ′ è 2 ′′. При дальнейшем движении якоря, вплоть до его конеч- ного положения, происходит увеличение контактного нажатия из-за сжатия контактной пружины 1. Одновременно контактный мостик 8 перемещается вверх на расстояние ∆ k, так как направляющая 10 не перпендикулярна мостику. В результате проскальзывания контакт-деталей мостика относительно неподвижных контакт-деталей происходит самозачистка их поверхностей во время работы
Рис. 3.5. Электромагнитное реле РПЛ
88
§ 3.1. Электромаханические реле
реле. При конечном положении якоря его вибрация устраняется действием короткозамкнутых витков 7.
После снятия входного сигнала магнитный поток в магнитопроводе уменьшается до остаточ- ного значения. При некотором значении потока, большем остаточного, сила, развиваемая деформированными при срабатывании пружинами 1 è 3, становится больше электромагитной силы. Якорь возвращается в исходное положение, контакты размыкаются. Для уменьшения остаточного потока до
значения, при котором исключается залипание” ” δ
якоря, в рассматриваемой конструкции зазор принимается несколько большим зазоров δ 1. Поэтому при δ 1 = 0 зазор δ > 0.
Электромагнитные реле защиты. Эти реле преимущественно применяют в продолжительном режиме работы, поэтому предъявляемые к ним требования по механической и коммутационной износостойкости менее жесткие, чем к реле управления. Их коммутационная износостойкость составляет
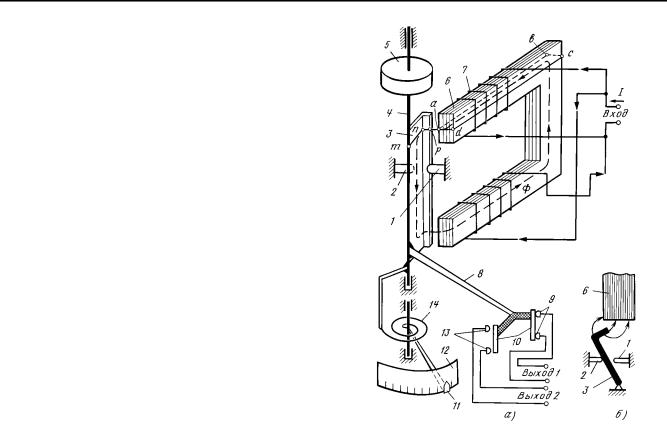
103÷ 2 104 циклов коммутаций. Электромагнитные реле защиты выпускаются различных серий. Рассмотрим схему одного из них – реле тока РТ-40 (рис. 3.6,à,á). На шихтованном магнитопроводе 6 П-образной формы размещены две обмотки 7, создающие поток Φ . Поток замыкается по легкому (для увеличения быстродействия) Г-образному якорю 3. Под воздействием электромагнитного момента якорь стремится повернуться по часовой стрелке (рис. 3.6,á) от упора 2 к упору 1. Механи- ческий момент создается специальной пружиной 14. При токе срабатывания действующий электромагнитный момент при всех углах поворота якоря (от начального до конечного, определяемых упорами 2 è 1) больше противодействующего механического. С якорем посредством изоляционного рычага 8 жестко связаны два подвижных контактных мостика 10. В начале поворота якоря при срабатывании правый мостик разомкнет контакт-детали 9, а левый в конце поворота якоря замкнет контакт-де- тали 13. При токе возврата под действием механи- ческого момента якорь повернется против часовой стрелки.
Реле РТ-40, как реле защиты, должно иметь высокий коэффициент возврата. Этого можно достичь приближением тяговой характеристики реле к механической. Однако, их чрезмерное сближение при конечном положении якоря приводит к недопустимому снижению контактного нажатия на замыкающих контактах. Рациональное согласование характеристик осуществляется изменением положения упоров 1 è 2.
Грубая регулировка тока срабатывания реле (в 2 раза) осуществляется путем различного (последовательного или параллельного) соединения об-
Рис. 3.6. Электромагнитное реле тока РТ-40:
à – общая схема; á – якорь и сердечник реле РТ-40 в сечении плоскостью mnpadcb
моток 7 (íà ðèñ. 3.6,à они соединены параллельно). Плавное регулирование осуществляется перемещением указателя уставки 11 (ðèñ. 3.6,à) по шкале уставок 12. Указатель уставки 11, соединенный с пружиной 14, при своем движении закручивает или раскручивает пружину, что соответственно приводит к подъему или отпусканию механической характеристики реле.
Описанное реле может работать как на постоянном, так и на переменном токе. Для устранения вибраций якоря, возникающих при работе на переменном токе, применяется гаситель колебаний 5, в котором энергия колебания переходит в работу трения песчинок.
Электромагнитные реле радиоэлектронных устройств. По номенклатуре эти реле – самые много- численные. К ним часто предъявляются требования коммутировать как повышенные, так и пониженные токи и напряжения. Многие типы этих реле предназначены для жестких условий эксплуатации, т. е. при воздействии постоянных ускорений, вибрации в широком диапазоне частот, ударов, значительных перепадов температуры окружающей среды, атмосферного давления, влажности и других факторов.
89
Гл. 3. Электромеханические аппараты автоматики
Рис. 3.7. Электромагнитное реле РЭС-80
Совершенствованию конструкций таких реле, улучшению их технических и эксплуатационных характеристик способствовала общая тенденция миниатюризации аппаратуры, широкое внедрение печатного монтажа и успехи в области бесконтактной коммутации и в микроэлектронике. Известны конструкции, содержащие в одном корпусе истинно электромагнитное реле и элементы электроники (интегральная схема, микропроцессор), что позволяет расширить функциональные и коммутационные возможности аппарата, осуществлять контроль состояния контактов, реализовывать оптимальный режим управления и т. д.
Наиболее характерными конструктивными особенностями большинства современных реле для радиоэлектронных устройств является их герметич- ность, применение уравновешенного якоря, крепление элементов контактного узла непосредственно
на металлических выводах, изолированных от цоколя стеклянными ”слезками”, использование температуростойких проводов и изоляционных материалов. Это обеспечивает надежную работу реле при значительных механических и климатических воздействиях [41].
Одним из характерных примеров реле для радиоэлектронных устройств является реле РЭС-80 (рис. 3.7). Это реле имеет два контактных узла.
Контактный узел содержит два переключающих контакта. Каждый из них имеет подвижные размыкающуюся (2) и замыкающуюся (11) контактные пружины и подвижную переключающую контактную пружину 12. Контактные пружины не имеют прикрепленных к ним сосредоточенных контактов. Для возможности коммутации низких токов и напряжений контактные пружины покрыты тонким слоем золота. Указанные детали контактного узла прикреплены к выводам, изолированным от цоколя 1 стеклянными ”слезками” 13.
Магнитная система реле содержит два полюсных наконечника 7 L-образной формы, сердечник 5
èякорь 4 с двумя полуосями – цапфами. Полюсные наконечники свариваются со стойкой 10 и планкой 8, изготовленными из нейзильбера. Цапфы якоря входят в отверстия в стойке и планке. В исходном положении якорь прижат к ограничительному упору на планке возвратной пружиной 9. После сборки якоря с полюсными наконечниками к их свободным концам приваривается сердечник с предварительно надетой на него обмоткой 6. После регулировки контактных узлов на цоколь устанавливается магнитная система. При этом имеющиеся на стойке 10 концы (не показаны на рисунке) вставляются в пазы на цоколе (также не показаны)
èпривариваются к нему. Переключение контактов при повороте якоря осуществляется стеклянными шариками на толкателях 3, приваренных к якорю.
Регулировка реле производится изменением хода якоря и изгибом толкателей. После регулировки вся сборка ”магнитная система – контактный узел и цоколь” закрывается кожухом и герметически запаивается или заваривается.
3.1.3. ПОЛЯРИЗОВАННЫЕ ЭЛЕКТРОМАГНИТНЫЕ РЕЛЕ
Поляризованные электромагнитные реле подразделяются на высокочувствительные, имеющие, как правило, один переключающий контактный узел, и менее чувствительные, которые имеют до двенадцати переключающих контактных узлов. Магнитодвижущая сила и мощность срабатывания высоко- чувствительных поляризованных электромагнитных реле значительно меньше, а быстродействие выше
чем у наиболее чувствительных нейтральных реле. Например, мощность срабатывания у первых составляет 10–150 мкВт, у вторых – 30–100 мВт. Многоконтактные поляризованные реле, называемые также дистанционными переключателями, по МДС срабатывания аналогичны нейтральным электромагнитным реле. Современные поляризованные реле чаще всего имеют две и более обмоток,
90

§ 3.1. Электромаханические реле
благодаря чему возможно более гибкое построение электрических схем, управление токами различной полярности и использование этих аппаратов не только в качестве коммутационных, но и логических элементов. Конструкции магнитной системы современных поляризованных электромагнитных реле построены по принципу дифференциальных или мостовых схем. Некоторые из них приведены на рис. 1.34.
Однако, выбор той или иной магнитной системы для проектирования поляризованных реле неоднозначен и зависит от многих конструкционно-тех- нологических факторов.
Поляризованные электромагнитные реле бывают как одностабильными, òàê è двустабильными. Они различаются также и по типу регулировки.
Ïðè двухпозиционной нейтральной регулировке
контактные узлы устанавливаются симметрично относительно нейтральной линии, являющейся одной из осей симметрии магнитной системы реле. Якорь в этом случае перебрасывается от одного своего крайнего устойчивого положения к другому (с реализацией коммутации выходных цепей реле контактными узлами) практически при одинаковых по модулю МДС в обмотке (или обмотках). При включении тока в обмотке (обмотках) якорь и, соответственно, контактные узлы, остаются в том положении, в котором они находились накануне. Такие реле называются двустабильными двухпозиционными.
Ïðè двухпозиционной регулировке с преобладанием
оба контактных узла располагаются по одну сторону от нейтрали, но на разных от нее расстояниях. Срабатывание таких реле происходит только при одном определенном направлении тока в обмотке (обмотках). После отключения тока якорь всегда возвращается в одно и то же первоначальное устой- чивое положение, коммутируя выходные цепи реле контактными узлами в обратном порядке. Такие реле функционируют как чувствительные нейтральные электромагнитные реле, поэтому и являются одностабильными.
Ïðè трехпозиционной регулировке контактные узлы расположены так же как и при двухпозиционной нейтральной регулировке – т.е. симметрично относительно нейтрали магнитной системы. Однако при отсутствии тока в обмотке (обмотках) якорь в реле с трехпозиционной регулировкой занимает нейтральное (среднее) устойчивое положение благодаря усилию достаточно жесткой возвратной пружины, часто являющейся и подвеской. Прохождение тока через обмотки в одном направлении заставляет якорь инициировать коммутацию одного из контактных узлов. При изменении направления
тока якорь отклоняется в другую сторону от нейтрали и вызывает коммутацию второго контактного узла. Токи срабатывания в обоих направлениях, так же как и у двухпозиционных реле с нейтральной регулировкой, будут практически одинаковыми. Такие реле называются одностабильными трехпозиционными.
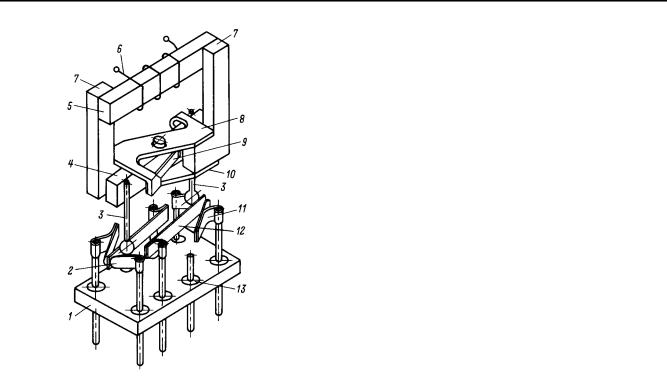
Конструкции поляризованных реле многообразны. Рассмотрим в качестве примера конструкционную схему реле РПС-47. Реле разработано на основе мостовой магнитной системы, показанной на рис. 1.39,ä; схема конструкции изображена на рис. 3.8.
Магнитная система реле содержит два сердечника 3 (на рисунке показаны только половины симметричных магнитной и контактной систем), на каждом из которых расположены две обмотки 2, 2 ′.
Концы сердечников размещены в отверстиях четырех полюсов 1, к более тонким концам которых прикреплены два постоянных магнита 8. Якорь 9 размещен между тонкими концами полюсов и постоянными магнитами. Между концами якоря и тонкими концами полюсов имеется четыре рабочих воздушных зазора δ 1 − δ 4 (ðèñ. 1.39,ä). Одна пара обмоток соединена последовательно таким образом, чтобы создаваемый ими суммарный управляющий магнитный поток проходил в магнитной системе вкруговую” – последовательно через сердеч- ники” и четыре рабочих воздушных зазора перпендикулярно плоскости якоря. Вторая пара обмоток соединена так же, но предназначена для создания управляющего потока противоположного направления.
Рис. 3.8. Поляризованное электромагнитное реле РПС-47
91

Гл. 3. Электромеханические аппараты автоматики
Поляризующий поток, выходя из северного |
мотки 2 |
è 2 ′ ) создается управляющий поток Φ y |
||
центрального полюса магнита, проходит в сред- |
(штриховая линия на рис. 1.39,ä), который в зазорах |
|||
нюю часть якоря, где расположена ось вращения 10, |
δ 1 è δ 3 ”складывается” с поляризующим потоком |
|||
и разделяется на два потока, которые проходят |
||||
(сплошные линии), а в зазорах δ 2 è δ 4 ”вычитается” |
||||
вдоль якоря в противоположных направлениях |
||||
к южным полюсам магнита, пересекая рабочие |
из него. В результате на якоре создается вращаю- |
|||
щий момент. Якорь перебрасывается из |
одного |
|||
воздушные зазоры. К якорю прикреплены четыре |
||||
крайнего |
положения в другое и толкатели 7 |
|||
толкателя 4 (система симметрична) со стеклянными |
||||
(см. рис. 3.8) перемещают переключающие пружи- |
||||
шариками 7. |
||||
íû 5 от одних малоподвижных пружин 6 к другим. |
||||
Контактная система состоит из четырех подвиж- |
После снятия управляющего сигнала с обмоток, |
|||
ных переключающих пружин 5 и восьми контакт- |
якорь блокируется магнитным полем постоянных |
|||
ных пружин 6 меньшей подвижности. Для повыше- |
магнитов. |
В первоначальное положение |
якорь |
|
ния надежности контактов контактные пружины 6 |
и переключающие пружины возвращаются подачей |
|||
имеют прорезь, что обеспечивает двойное парал- |
сигнала управления на вторую пару обмоток, маг- |
|||
лельное контактирование. |
нитный поток от которых будет ”суммироваться” |
|||
Реле работает следующим образом. При подаче |
с поляризующим потоком в зазорах δ 2 è δ 4, à â |
|||
управляющего сигнала на одну пару обмоток (об- |
зазорах δ 1 |
è δ 3 – ”вычитаться” из него. |
|
|
3.1.4.МАГНИТОУПРАВЛЯЕМЫЕ ГЕРМЕТИЗИРОВАННЫЕ КОНТАКТЫ (ГЕРКОНЫ) И ГЕРКОНОВЫЕ РЕЛЕ
Магнитоуправляемым контактом (МК) называется контакт электрической цепи, изменяющий состояние электрической цепи посредством механического замыкания или размыкания ее при воздействии управляющего магнитного поля на его элементы, совмещающие функции контактов и участков электрических и магнитных цепей. Магнитоуправляемый контакт, помещенный в герметизированный баллон, называется герметизированным магнитоуправляемым контактом èëè герконом
[3, 5, 44, 45]. Появление МК позволило решить несколько задач:
устранить воздействие на область контакта как окружающей среды, так и многих продуктов, образующихся в процессе работы коммутационных электромеханических аппаратов, что расширило возможности коммутации электрических цепей с очень малыми токами (10-10÷ 10-12 А) и напряжениями (10-6 Â);
повысить механическую износостойкость (до 109 циклов и выше);
максимально унифицировать элементную базу и упростить коммутационные аппараты, повысить их быстродействие.
Так как детали МК реализуют функции контактов и участков электрических и магнитных цепей, их называют контактными сердечниками (КС). Контактные сердечники могут быть неподвижными и подвижными. Часто подвижные КС выполняются гибкими и играют роль возвратной пружины. Магнитоуправляемые контакты с гибкими подвижными КС называют безъякорными, так как в них отсутствует жесткий подвижный элемент магнитной системы – якорь, характерный для негерконо-
вых электромагнитных реле. К безъякорным относятся язычковые è мембранные МК. Первые получи- ли наибольшее распространение. Якорные МК в учебнике не рассматриваются.
Существуют МК сухие (с твердыми контактами) и смоченные жидким металлом.
Сухие язычковые магнитоуправляемые контакты.
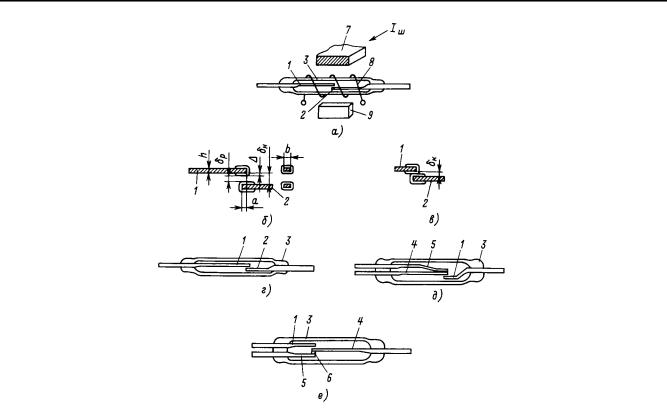
Язычковыми называются МК, содержащие КС в виде консольно закрепленных пластин или стержней, изгибающихся под воздействием магнитного поля. Наиболее распространенные виды (рис. 3.9): симметричный и асимметричный замыкающие МК; переключающий МК вида РП-3 [размыкаемый (Р) и переключающий (П) контактные сердеч- ники закреплены с одной стороны герметизированного баллона, а замыкаемый (З) с другой]; переключающий МК вида РЗ-П (размыкаемый и замыкаемый КС расположены с одной стороны баллона, а переключающий – с противоположной).
Симметричный язычковый замыкающий МК
(ðèñ. 3.9,à) – простейшая конструкция, состоящая из одинаковых подвижных КС, заваренных в стеклянную трубку диаметром от 2 до 5,5 мм, которая после изготовления МК образует герметизированный баллон. Длина баллонов составляет от 7,5 до 50 мм. Общая длина (с выводами) язычковых МК– от 20 до 80 мм. При изготовлении баллон заполняется сухим газом (например, азотом, водородом или их смесью) при различных давлениях или вакуумируется. Для того, чтобы КС выполняли свои функции, материал, из которого их изготовляют, должен обладать определенными свойствами: большой магнитной индукцией в полях с напряженностью
92
§ 3.1. Электромаханические реле
Рис. 3.9. Основные виды сухих язычковых магнитоуправляемых контактов:
à – симметричный замыкающий МК; á, â – разомкнутое и замкнутое положение КС замыкающего МК; ã – асимметричный замыкающий МК; ä – переключающий МК вида РП-3; å – переключающий МК вида РЗ-П; 1,2 – замыкаемые КС; 3 – баллон; 4 – переключающий КС; 5 – размыкаемый КС; 6 – немагнитная контакт-деталь; 7 – шина; 8 – обмотка; 9 – постоянный магнит
приблизительно 200–700 А/м; низкой коэрцитивной силой; достаточной электропроводностью; хорошей упругостью; малой зависимостью магнитных и механических свойств от температуры в пределах ее рабочего диапазона; незначительными изменениями этих свойств после 108–109 упругих деформаций и ударов КС друг о друга; коэффициентом теплового расширения (КТР), близким к КТР стекла, используемого для баллона. Указанные свойства имеют, например, низконикелевые пермаллои. Контактные сердечники язычковых МК штампуются из проволоки диаметром 0,5–1,5 мм, изготовленной из этих материалов.
Внутренние концы КС в язычковых МК перекрываются на величину a и имеют контактное покрытие ∆ (рис. 3.9,á) толщиной от единиц до десятков микрон. Для изготовления КС используются материалы: рутений, родий, сплавы на основе золота и др. Существуют также и более сложные (многослойные и многоструктурные) покрытия. В магнитоуправляемых контактах высокого напряжения и в МК, коммутирующих повышенные токи, применяются тугоплавкие металлы (например, вольфрам, молибден). Защитная среда в баллоне предохраняет контактные покрытия МК от окисления.
При отсутствии управляющего магнитного поля перекрывающиеся поверхности внутренних концов КС удалены друг от друга на размер немагнитного рабочего зазора δ í. При этом между поверхностями контактных покрытий имеется раствор δ ð, который у язычковых МК составляет обычно от 40 до 300 мкм. Внешние концы КС служат для присоединения МК к коммутируемой электрической цепи. При воздействии управляющего магнитного поля от шины с током, обмотки с током или постоянного магнита (рис. 3.9,à) между КС возникает электромагнитная сила. Эта сила, преодолевая механическую силу упругости КС, приближает их внутренние концы друг к другу. При определенной напряженности поля (значение срабатывания) КС скачкообразно переходят в замкнутое состояние, которому соответствует конечный немагнитный зазор δ ê (ðèñ. 3.9,â), определяемый суммарной толщиной контактных покрытий и неплотностью прилегания контактных поверхностей друг к другу. Уменьшение напряженности поля до значения возврата вызывает размыкание КС под действием их сил упругости.
Асимметричный язычковый замыкающий МК
(ðèñ. 3.9,ã ) имеет разные КС, один из которых
93