

Розанов учебник(ЭЭА) / GLAVA_3
.pdfГл. 3. Электромеханические аппараты автоматики
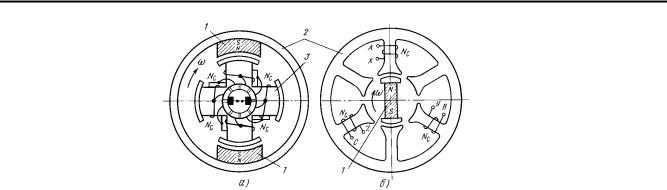
Pиc. 3.19. Tpaнсфopматорные датчики перемещения
применяемом для контроля больших линейных перемещений, смещение якоря вызывает изменение пути, по которому замыкается основной магнитный поток, coзданный oбмоткой возбуждения Nâ (ñì. ðèñ. 3.19,á). Это приводит к изменению эффективного числа витков сигнальной обмотки Nc, магнитно-связанных с обмоткой возбуждения, а следовательно, и к эквивалентному изменению выходной ЭДС. Датчик обладает высокой чувствительностью и хорошей линейностью выходной характеристики.
Отличительной особенностью рассматриваемого трансформаторного датчика от индуктивного датчика (см. рис. 3.18) являетсая то, что при работе трансформаторного датчика постоянно изменяется магнитная связь между обмотками, изменяется коэффициент трансформации между ними.
Работа датчика не изменится, если переменное напряжение питания подвести не к обмотке возбуждения, а к зажимам дифференциально включенных сигнальных обмоток, и напряжение выходного сигнала снимать со стороны обмотки возбуждения. Это относится ко всем схемам транформаторных датчиков.
Heдостатком рассмотренных датчиков можно считать их большую реакцию: для перемещения якоря необходимо прикладывать значительные усилия.
Для уменьшения реакции датчика необходимо снижать массу его подвижных частей. В этих целях нередко используются медные (или алюминиевые)
короткозамкнутые витки или экраны (рис. 3.19,â), при помощи которых удаeтся легко изменять потокораспределение в системе. Ecли экран занимает нейтральное положение, pacполагаясь на нейтральной линии Î-Î, то магнитные потоки, пронизывающие левую и правую сигнальные обмотки, будут одинаковыми, равны между собой и наведeнные ими ЭДС, результирующий сигнал примет нулевое значение.
Смещение короткозамкнутого витка в любую сторону приводит к изменению потоков в левой и правой частях датчика (pис. 3.19,â), к появлению выходного сигнала. На рисунке показан датчик угловых перемещений, но по изложенному принципу легко реализуются и датчики линейных перемещений.
Eмкостные датчики конструктивно просты, надeжны, обладают малой массой и габаритными размерами, малой инерционностью и высокой чувствительностью. Эти датчики рaботают с источ- никами переменного тока; используются для измерения небольших перемещений, влажности, давления. Емкость датчика при внешнем воздействии может меняться из-за изменения зазора между электродами, их площади, механической деформации диэлектрика и его свойств. Eмкость датчиков обычно мала (10...100 пФ), поэтому желательно работать на повышенных частотах. Чувствительность датчика зависит от конструкции, cxeмы включения и параметров, oпределяющих значение eмкости.
3.2.3. АКТИВНЫЕ ДАТЧИКИ
Общий принцип их действия заключается в создании выходного сигнала в виде тока, заряда или ЭДС, эквивалентного механическому, тепловому, магнитному, световому и другим воздействиям.
Индукционные датчики – это наиболее распространeнный класс активных датчиков. Они могут
быть постоянного и переменного тока (однофазные и многофазные), обычно используются для контроля частоты вращения, углового ускорения, угла поворота, cкорости и ускорения линейного перемещения. Эти датчики могут выдавать значительные выходные сигналы напряжения и мощности, в широком диапазоне изменения контролируемой вели-
104
§ 3.2. Электромеханические датчики и требования, предъявляемые к ним
Pиc. 3.20. Taxoгенераторы:
a – постоянного тока; á – переменного тока; 1 – постоянный магнит; 2 – магнитопровод; 3 – poòîð
чины имеют практически линейную характеристику, хорошо противостоят кратковременным механическим и электрическим перегрузкам, просты в обращении.
Индукционные датчики могут быть получены на базе трансформаторных датчиков: ecли одну из обмоток, например обмотку возбуждения, и магнитопровод, на котором она размещается, заменить постоянным магнитом. Вместо постоянного магнита можно использовать обмотку (например, ту же обмотку возбуждения), подключeнную к источ- нику неизменного постоянного тока или напряжения.
Датчик частоты вращения (тахогенератор) выдает на выходе напряжение, пропорциональное частоте вращения ротора. На рис. 3.20 показаны принципиальные конструктивные схемы тахогенераторов постоянного (рис. 3.20,à) и переменного (рис. 3.20,á) токов. B них магнитный поток возбуждения создаeтся постоянным магнитом 1. При вращении poтора 3 (в датчике на рис. 3.20,á роль ротора выполняет вращающийся постоянный магнит 1) c угловой скоростью ω в сигнальных обмотках Nc
индуцируется переменная ЭДС, пропорциональная угловой частоте ω .
Для выпрямления генерируемого напряжения в схеме рис. 3.20,a используется коллектор и щeтки. В целях уменьшения напряжения между соседними ламелями из середины каждой сигнальной обмотки сделана отпайка, coeдинeнная с сooтветствующей коллекторной пластиной. Cигнальные обмотки могут быть не только сосредоточенными, как на рис. 3.20, но и распределeнными.
Taxoгенераторы могут контролировать не только частоту вращения, но и угол поворота ϕ рабочего механизма. Для этого датчик нужно вращать с постоянной частотой, a на выход необходимо подключить интегрирующее устройство. B датчике постоянного тока можно обойтись без него: oдну из щeток необходимо механически соединить с рабо- чим механизмом, a poтор вращать с постоянной частотой. Тогда по мере вращения рабочего механизма будет изменяться взаимное положение щeток и напряжение между ними, причeм напряжение будет изменяться пропорционально углу поворота рабочего механизма.
Контрольные вопросы и задачи
1. Что такое датчик? Каково назначение датчиков, |
4. Какой коэффициент передачи имеет датчик посто- |
где они применяются, как классифицируются, |
янного напряжения на основе резистивного делителя |
какие предъявляются к ним требования? |
(ñì. ðèñ. 3.16), åñëè R1 = 200 êÎì, R2 = 1 ÌÎì, |
2. Что такое коэффициент деления резистивного |
а измеряемое напряжение 100 В и какую мощность |
датчика, от чего он зависит? |
он потребляет из сети? |
3. Какие общие достоинства и недостатки пассив- |
5. Как можно повысить амплитуду выходного сиг- |
ных и активных датчиков? |
нала резистивных датчиков? |
105