

Розанов учебник(ЭЭА) / GLAVA_3
.pdfГл. 3. Электромеханические аппараты автоматики
более гибкий. Такой МК сложнее в изготовлении, однако асимметрия помогает разрешить проблему миниатюризации, так как для одного и того же раствора и возвращающей механической силы КС длину баллона удается получить меньше, чем при симметричном исполнении. Применение асимметричных язычковых МК дает также возможность в ряде случаев получить более компактные переклю- чатели, управляющее магнитное поле в которых создается подвижным постоянным магнитом. Принцип действия асимметричных язычковых замыкающих МК такой же, как и у симметричных конструкций.
Âэлектрических аппаратах на базе замыкающих МК могут быть реализованы и размыкающие контакты, если использовать поляризующее магнитное поле (например, от постоянного магнита), а управляющее поле направлять в МК встречно поляризующему.
Âисходном состоянии большинства язычковых переключающих МК (рис. 3.9,ä,å) переключающий КС механически поджат к размыкаемому. При определенном значении управляющего поля происходит перемещение переключающего КС от размыкаемого к замыкаемому. Замыкаемый КС обыч- но выполняется неподвижным (рис. 3.9,ä). Из двух других КС переключающий обладает существенно большей гибкостью. Конструкционная схема, показанная на рис. 3.9,å, имеет один подвижный (переключающий) и два неподвижных КС. Возможность переключения в этой конструкции обеспечивается созданием асимметрии вследствие: большого немагнитного рабочего зазора между КС
4 è 5 по сравнению с зазором между КС 1 è 4 (с этой целью на КС 5 устанавливается немагнитная контакт-деталь 6, например, как показано на рисунке); разных перекрытий между КС; выполнение КС 5 с меньшей площадью поперечного сечения чем у КС 1, в целях магнитного насыщения при воздействии магнитного поля.
Выполняются КС сухих язычковых МК не только из магнитомягких материалов (пермаллоев), но и из среднекоэрцитивных материалов с высокой остаточной магнитной индукцией. В этом случае после замыкания МК его КС при снятии воздействия управляющего поля остаются в замкнутом состоянии за счет их остаточной магнитной энергии. Такие МК с магнитной памятью называются гезаконами (герметизированными замыкающими контактами).
Смоченные (жидкометаллические) язычковые магнитоуправлемые контакты. Смоченные (жидкометаллические МК-ЖМК) – это МК, внутри герметизированного баллона которых токопроводя-
щие детали частично или полностью смочены жидким металлом. Наиболее распространенный смачи- вающий материал в настоящее время – ртуть. Рассмотрим один из язычковых ЖМК (рис. 3.10). Подвижный переключающий КС расположен между контакт-деталями, закрепленными на неподвижных КС, заваренных в баллон. Нижняя часть баллона – резервуар с ртутью. Находящаяся в ртути нижняя часть переключающего КС приварена к штенгелю. По капиллярам, имеющимся на поверхности переключающего КС, ртуть поднимается к контактным поверхностям и смачивает их. Баллон заполнен водородом при давлении выше 1 МПа. Водород устраняет пленки оксидов с внутренних контактирующих и капиллярных частей ЖМК и, тем самым, способствует лучшему смачиванию их ртутью. Высокое давление газа улучшает отвод тепла, увеличивает электрическую прочность, а также повышает температуру кипения ртути. Повышение температуры кипения уменьшает количе- ство ртути, испаряемой при коммутации.
Работа такого ЖМК возможна только при поляризации. Поляризующее магнитное поле создается либо одним постоянным магнитом, расположенным между выводами неподвижных КС или на одном из них, либо двумя постоянными магнитами, размещенными на этих выводах.
Существуют язычковые переключающие ЖМК, работающие без поляризации (выполняются аналогично сухому МК – см.рис. 3.9,å), а также язычковые замыкающие ЖМК.
Благодаря смоченности контактных поверхностей в ЖМК можно устранить явление дребезга (разрывы цепи при вибрации КС после их первого соударения), снизить сопротивление МК в замкнутом состоянии и повысить его стабильность до 1-2 мОм в течение срока службы. Быстрое установление контакта позволяет при помощи ЖМК формировать сигналы с наносекундным фронтом.
Рис. 3.10. Ртутный язычковый переключающий МК (ЖМК): 1, 2 – неподвижные КС; 3, 8 – контакт-детали; 4 – переклю- чающий КС; 5 – баллон; 6 – резервуар с ртутью; 7 – штенгель
94
§ 3.1. Электромаханические реле
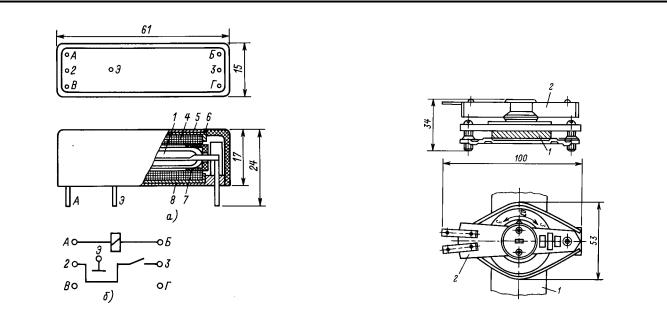
Рис. 3.11. Герконовое реле напряжения РЭС-45:
à – общий вид; á – электрическая схема; 1 – ÌÊ; 2, 3 – выводы цепи МК; 4 – обмотка; 5 – корпус; 6 – магнитный экран; 7 – амортизационные втулки; 8 – основание; À, Á – выводы цепи обмотки; Â, Ã – свободные выводы; Ý – вывод экрана
Рис. 3.12. Герконовое реле тока РТГ-01010: 1 – øèíà; 2 – пластмассовая планка с МК
Резервуарные ЖМК могут работать при наклонах от вертикального положения не более чем на 15–45°. Существуют язычковые безрезервуарные ЖМК, жидкий металл в которых находится только в капиллярах переключающего КС. Такие ЖМК работают в любом пространственном положении, однако вследствие ограниченного запаса ртути ресурс их меньше чем у резервуарных ЖМК.
Герконовые реле. Герконовые реле могут содержать: один или несколько МК; одну или несколько обмоток (или шин); поляризующие постоянные магниты (ПМ); дополнительные ферромагнитные детали, играющие роль магнитопровода, кожуха, магнитного экрана (для снижения влияния внешних магнитных полей); другие детали конструкции. Конструкция герконового реле с одним сухим замыкающим язычковым МК приведена на рис. 3.11.
На основе МК создают и многоцепные реле, располагая, например, в обмотке несколько коммутационных элементов. Существуют конструкции герконовых реле и с внешним по отношению
êобмотке расположением МК.
Âреле тока на номинальные токи в сотни и тысячи ампер управляющим элементом является не обмотка, а шина, по которой протекает ток. Регулировка уставки в таких реле осуществляется тремя способами: изменением угла между продольными осями МК и шины; изменением расстояния между шиной и МК; введением между МК и шиной экранирующей ферромагнитной пластины. Примером реализации первого способа является реле РТГ-01010 (рис. 3.12), в котором регулировка осуществляется поворотом планки 2 (внутри которой расположен МК) относительно шины 1. Пределы регулирования уставки в этом реле – (0,7–3) Iíîì .
3.1.5. ИНДУКЦИОННЫЕ РЕЛЕ
Работа индукционных реле основана на исполь- |
Упрощенная схема одного из видов индукцион- |
зовании сил взаимодействия переменных магнит- |
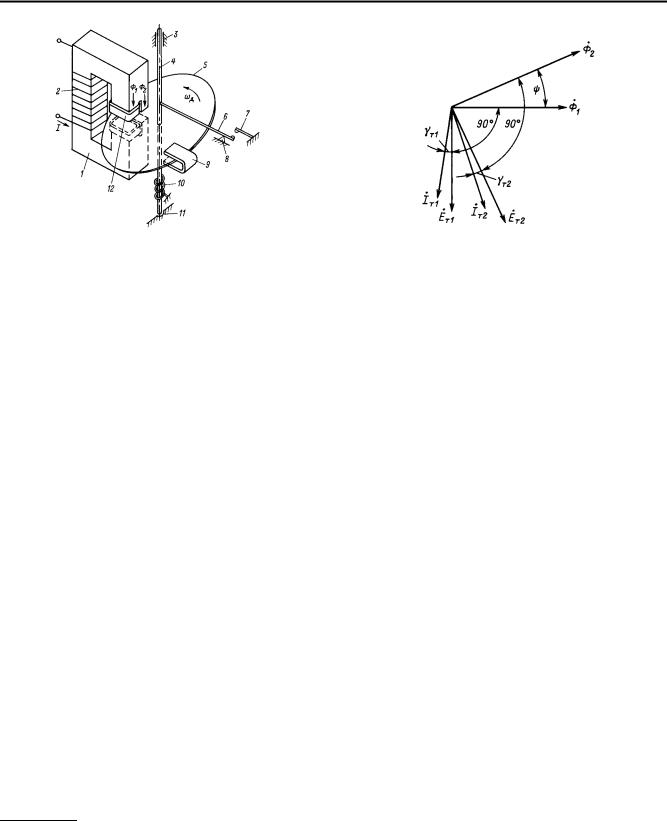
ного реле с диском изображена на рис. 3.13. Реле |
ных полей неподвижных обмоток с токами, индук- |
состоит из шихтованного магнитопровода 1 с обмот- |
тированными этими полями в подвижном электро- |
êîé 2. Полюсы магнитопровода охватывают алюми- |
проводящем элементе. Поэтому такие реле могут |
ниевый диск 5. Îñü 4, жестко связанная с диском, |
работать только на переменном токе. Электропро- |
может вращаться в подшипнике 3, опираясь нижним |
водящий элемент выполняется в виде диска, ци- |
концом на подпятник 11. При отсутствии тока в |
линдрического ротора, сектора или рамки, имею- |
обмотке подвижный контактный элемент 6 поджат |
щих возможность вращения. |
к упору 8 действием пружины 10 íà îñü 4. |
95
Гл. 3. Электромеханические аппараты автоматики
Рис. 3.13. Индукционное реле с диском |
Рис. 3.14. Векторная диаграмма индукционного реле |
При подаче переменного тока в обмотку диск поворачивается и подвижный контактный элемент 6 замыкается с неподвижным контактным элементом 7 – реле срабатывает. Возврат реле осуществляется усилием пружины 10. Для создания вращающего момента, достаточного для срабатывания индукционного реле, диск должен пронизываться не менее чем двумя знакопеременными магнитными потоками, сдвинутыми относительно друг друга в пространстве и во времени (по фазе), что и выполнено в рассматриваемой конструкции при помощи расщепления полюсов на две части и установки на одной из них короткозамкнутых колец 12.* В результате в рабочем зазоре магнитной системы образуются магнитные потоки Φ 1 è Φ 2, причем поток
Φ 1 отстает по фазе от потока Φ 2 на угол ψ (рис. 3.14). Эти потоки индуктируют в диске соответствующие ЭДС трансформации Eò1 è Eò2, отстающие от них по фазе на 90°.
Напомним, в движущемся диске согласно закону Фарадея-Ленца будет индуктироваться суммарная ЭДС
|
|
|
eè = − |
dΦ |
= eò + eã . |
(3.1) |
|
|
|
||||
|
|
|
|
dt |
|
|
Здесь |
|
|
|
|
|
|
eò = − |
∂Φ |
|
– ЭДС трансформации; |
(3.2) |
||
∂ |
|
|||||
|
t |
|
|
|
||
|
|
|
eã = |
∫ [V B] dl |
(3.3) |
|
–ЭДС генерации (или ЭДС движения).
Â(3.3) V – линейная скорость участка dl диска; B – магнитная индукция, создаваемая полюсом на участке dl.
Ïðè |
синусоидальном изменении потока |
eò = − ω |
Ô m cos ω t. |
* Небольшой вращающий момент может возникнуть и при одном магнитном потоке [29, 46].
Электродвижущие силы трансформации вызывают в диске токи трансформации Iò1 è Iò2 , которые из-за существования индуктивных составляющих в электрическом сопротивлении диска отстают от ЭДС соответственно на углы γ ò1 è γ ò2.
Выражение для среднего суммарного значения вращающего момента [29, 46].
M |
= |
∆ äω |
|
χ Φ |
Φ |
2m |
sinψ , |
(3.4) |
|
|
|||||||
âpΣ |
|
2πρ |
ý |
1m |
|
|
||
|
|
|
|
|
|
|||
ãäå ∆ ä – толщина диска; ρ ý – удельное электрическое сопротивление материала диска; χ – геометри- ческая постоянная индукционной системы; Φ 1m è Φ 2m – амплитудные значения потоков Φ 1 è Φ 2.
Геометрическая постоянная χ индукционной системы является функцией размеров полюсов, их взаимного расположения и размещения относительно диска.
При вращении диска под воздействием ÌâðΣ â íåì
появляются генераторные ЭДС (ЭДС движения), которые в литературе по индукционным реле принято называть ЭДС резания Åðåç 1 è Åðåç 2, обусловленные пересечением магнитных потоков Φ 1 è Φ 2 диска. Направление этих ЭДС определяется правилом правой руки. В свою очередь ЭДС резания вызывают в диске токи резания Iðåç 1 è Iðåç 2 [29, 47].
Взаимодействие этих токов с потоками Φ 1 è Φ 2 создает тормозной момент (направлен против вращающего момента). В ряде случаев для создания дополнительного тормозного момента (с целью ограниче- ния скорости диска) его край охватывают полюсами постоянного магнита (см. поз.9 íà ðèñ. 3.13).
Так как вращающий момент в индукционных системах является функцией частоты, амплитудных значений магнитных потоков Φ 1m è Φ 2m, а также угла сдвига фаз между комплексными значениями последних (см.3.4), то эти системы могут быть
96

§ 3.1. Электромаханические реле
использованы для создания различных по назначе- нию реле:
|
реле частоты, если ω = |
var, a Φ 1mΦ |
2m sinψ |
= const; |
||
|
реле напряжения, если Φ 1mΦ 2m ≡ |
U m2 = var, à ω = |
||||
= |
const è ψ = const; |
|
|
|
||
|
ðåëå |
|
òîêà, åñëè Φ 1mΦ |
2m ≡ I m2 = |
var, à ω |
= const; |
è ψ = const; |
|
|
2msinψ ≡ |
|||
|
ðåëå |
|
активной мощности, если Φ 1mΦ |
|||
≡ |
UI cosϕ |
= var (ϕ – угол между U è I ), à ω |
= const; |
|||
|
ðåëå |
|
реактивной мощности, если Φ 1mΦ |
2msinψ ≡ |
||
UI sinϕ |
= |
var, à ω = const; |
|
|
|
|
|
реле сопротивления – при реализации сложной |
|||||
схемы |
присоединения |
обмоток |
индукционной |
|||
системы к сети [48] с применением специальных трансформаторов тока (трансреакторов).
В настоящее время в связи с бурным развитием электроники в системах защиты индукционные реле используются практически только как реле тока и мощности.
Индукционные системы с диском отличаются невысокой чувствительностью и большим временем срабатывания из-за значительного момента инерции подвижного элемента – диска. Поэтому такие системы в настоящее время применяются только в реле тока РТ-80 и РТ-90 для реализации зависимой от тока характеристики времени срабатывания. С конструкцией и работой этих реле можно ознакомиться в [46, 47].
Для создания более чувствительных и быстродействующих индукционных реле используются системы с подвижным алюминиевым цилиндри- ческим ротором или сектором. Система с подвижным цилиндрическим ротором используется в однофазных реле направления мощности РБМ-170 и РБМ-270. Эти реле имеют две обмотки. Одна из них подключается к трансформатору тока и обтекается вторичным током IA, а вторая – к трансформатору напряжения и обтекается током IV, пропорциональным напряжению U на зажимах обмотки. Каждый из токов создает магнитный поток, пронизывающий ротор. Потоки сдвинуты в пространстве на угол π /2 за счет применения четырехполюсной конструкции магнитной системы [29, 47]. Поскольку один из потоков пропорционален току IA, а другой напряжению U, то вращающий момент, возникающий на роторе, пропорционален мощности на зажимах реле [см.(3.4)], и его направление зависит от направления этой мощности.
Реле РБМ-170 и РБМ-270 используются в схемах релейной защиты для выявления и отключения линий, на которых произошло короткое замыкание.
На основе индукционной системы с подвижным сектором сконструированы реле серии ДСШ, полу- чившие широкое распространение в автоматических устройствах на железнодорожном транспорте [46, 49].
Контрольные вопросы
1. Какой вид имеют характеристики управления |
11. Назовите виды регулировки уставки герконово- |
аппарата релейного действия? |
го реле с управляющим органом в виде шины |
2. Чем отличается электрическое измерительное |
с током. |
реле от электрического логического реле? |
12. Поясните принцип действия индукционного |
3. Что такое коэффициент возврата реле? |
реле с диском. |
4. Какие существуют виды зависимостей выдерж- |
13. Дайте определение ЭДС трансформации и ЭДС |
ки времени от характеристической величины изме- |
генерации? |
рительного реле? |
14. Может ли создать вращающий момент на диске |
5. Дайте определение электрического реле. |
индукционной системы один магнитный поток? |
6. Какое электрическое реле называется электро- |
15. Как повлияет на вращающий момент индукци- |
магнитным? |
онного реле с диском изменение угла сдвига фаз от |
7. Что такое одностабильное и двустабильное реле? |
π ⁄ 6 до π ⁄ 4 между двумя магнитными потоками, |
8. Что понимается под трехпозиционной регули- |
пронизывающими диск (при прочих равных усло- |
ровкой поляризованного электромагнитного реле? |
âèÿõ)? |
9. Объясните принцип действия простейшего гер- |
16. Как изменится скорость вращения диска в |
конового реле. |
индукционном реле, если при прочих равных |
10. Что такое жидкометаллический геркон? Пояс- |
условиях диск охватить полюсами постоянного |
ните его функционирование. |
магнита? |
97
Гл. 3. Электромеханические аппараты автоматики
3.2. ЭЛЕКТРОМЕХАНИЧЕСКИЕ ДАТЧИКИ И ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ К НИМ
Äaò÷èê – это первый элемент измерительного канала, как правило, аналоговое устройство, выдающее информацию о параметрах системы и протекающих в ней процессах. Oн является основным источником электрического сигнала (изменение состояния электрической цепи за счeт еe замыкания и размыкания, изменения одного из электрических параметров – R, L, C – или генерации ЭДС), который в последующей части цепи подвергается обработке, преобразованию к виду, удобному для передачи по линиям связи и дальнейшего преобразования и использования.
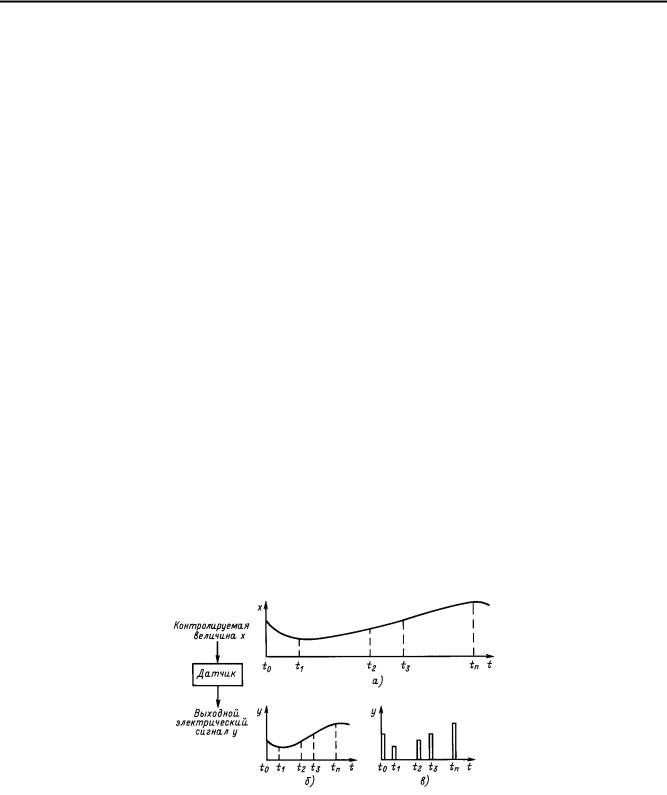
Электрический датчик – устройство, которoe, подвергаясь воздействию некоторой, как правило, неэлектрической, физической величины (скорость, ускорение, давление, температура, влажность, ocвещeнность, состав и процентное содержание примесей, частота колебаний, цвет и т. п.), выдаeт эквивалентный электрический сигнал (заряд, ток, напряжение и т. д.), являющийся функцией этой контролируемой величины [5, 14, 42, 50–54]: y = f (x), ãäå x – вxoдная, контролируемая (peгулируемая) величина (рис. 3.15,a); y – выходной сигнал датчика (рис. 3.15,á,â).
B oбщем случаe под сигналом понимают материальный носитель информации: изменяющиeся заряд, ток или напряжениe, несущие информацию об измеряемой величине.
Paзличают две основные фopмы сигналов:
•непрерывную в виде физического процесса; информация в нeм определяется значением како- го-либо информативного параметра: тока, частоты, амплитуды, фазы и др. (рис. 3.15,á);
•дискретную (кодированную), при которой информация заключена в числе элементов кода,
их расположении во времени или в пространствe (pиc. 3.15,â).
Дaтчики дополняют и рacширяют возможности чувств и oщущений человека. Без датчиков невозможны контроль качества продукции, производствo и потреблениe электроэнергии, распознавание образов (формы, габаритных размеров, химического состава, расположения, скорости перемещения и т. д.), coздание манипуляторов и роботов и т. п.
Для современного производства xapактерно применение датчиков в интерактивном режиме, т. e. когда результаты измерений сразу же используются для регулирования процесса. Это позволяет быстро корректировать технологический процесс, повышать качество выпускаемой продукции и увеличивать еe количество.
В состав датчика могут входить функциональные узлы [3, 5, 50]:
•чувствительный элемент, по существу сам датчик, непосредственно воспринимающий воздействие контролируемой величины;
•преобразователь (например, преобразователь переменного напряжения в постоянное пропорциональное среднему или действующему значению входного или выходного напряжения),
•усилитель, предназначенный для согласования выходных сигналов датчика с входом системы управления; фильтры, согласующие каскады (выпрямители, резисторы, дроссели, трансформаторы), элементы гальванической развязки и т, п.
Датчики как составная часть систем автомати- ческого регулирования характеризуются как стати- ческими, так и динамическими показателями.
Рис. 3.15. Пример изменения во времени:
a – контролируемой величины x и соответствующего выходного сигнала y датчика; á – при непрерывном выходном сигнале; â – при дискретном выходе
98

§ 3.2. Электромеханические датчики и требования, предъявляемые к ним
Датчики должны иметь: высокую надeжность, большой срок безотказной работы; высокую точность δ % = Y/Y.100% (выраженное в процентах относительное отклонение выходного сигнала к номинальному его значению); стабильность и однознач- ность характеристик (отсутствие остаточного сигнала, зоны нечувствительности и гистерезиса) и их независимость от внешних воздействий (старение элементов схемы, нестабильность питающего напряжения и сопротивления на выходе измерительного органа, влияние окружающей среды и т. п.); высокую восприимчивость – способность реагировать на незначительные отклонения измеряемой величины; высокую чувствительность s = dy/dx , кoторая не должна зависеть от значения и закона изменения контролируемой величины; высокое быстродействие, cкорость преобразования изме-
ряемой величины должна обеспечивать надeжное слежение за еe изменениями; высокую эффективность: максимальный выходной сигнал при минимальной входной потребляемой энергии; минимальные статические и динамические погрешности; минимальную реакцию, сам датчик не должен искажать процессы, за которыми он призван следить и контролировать; не оказывать влияния на обслуживающий персонал и работу близлежащих аппаратов и устройств; минимальную пульсацию выходного сигнала (датчик постоянного тока) и минимальные колебания фазы выходного напряжения (датчик переменного тока); минимальные габаритные размеры, массу и стоимость; простую конструкцию, предусматривающую свободную компоновку с другими аппаратами и элементами [5, 50–54].
3.2.1. КЛАССИФИКАЦИЯ ДАТЧИКОВ
B ocнову классификации датчиков могут быть положены различные критерии и признаки. Haпример, датчики можно классифицировать по:
•физическим явлениям, лежащим в основе их работы (закон электромагнитной индукции, эффект Xoлла, закон Hepнcтa, магнитострикция, изменение электрической eмкости от влажности и
ò.ï.);
•наличию подвижных элементов (электромеханические) или их отсутствию (статические);
•принципу действия;
•устройству;
•назначению;
•контролируемой величинe: давление, влажность, ускорение, угол поворота и т. п.;
•объекту регулирования: температура печи, частота вращения двигателя, скорость перемещения дуги;
•виду передаточной функции: безынерционные, инерционные, c запаздыванием и т. п.
Рис. 3.16. Резистивные датчики и их характеристики:
à – потенциометрический; á – реостатный; â, ã – характеристики патенциометрического и реостатного датчиков при:
1 – Ríä1 → ∞ ; 2 – Ríä2 < Ríä1; 3 – Ríä3 > Ríä2; 4 – Ríä4 < Ríä3; 5 – Ríä5 = 0
99

Гл. 3. Электромеханические аппараты автоматики
Heзависимо от перечисленного выше все датчи- ки подразделяются на:
•пассивные или параметрические;
•активные или генераторные.
Из названий следует, что к первой группе относятся датчики, которые не в состоянии самостоятельно создавать на выходе электрический сигнал, дляих работы необходим источник питания, a датчик под воздействием контролируемой величины лишь меняет свои внутренние параметры, что в конечном итоге и вызывает изменение выходного сигнала (например, резистивные, индуктивные и емкостные датчики). Напри-
мер датчик, изображенный на рис. 3.16, можно охарактеризовать как электромеханический пассивный резистивный датчик положения рабочего механизма (РМ). Aктивные датчики не нуждаются в постороннем источнике питания, они сами генерируют электрический сигнал, как правило в виде ЭДС, под воздействием измеряемой величины. Например, индукционные; тepмоэлектрические; пироэлектрические; фотоэлектрические (на внешнем или внутреннем фотоэффекте); фотоэлектромагнитные; пьезоэлектрические; Bиганда; Xoлла; магнитоcтрикционные; нa твeрдых электролитах.
3.2.2. ПАССИВНЫЕ ДАТЧИКИ
Пассивные датчики являются нaиболее простыми, доступными, легко реализуемыми и широко распространeнными датчиками.
Peзистивные датчики – используются для контроля линейных и угловых перемещений, давления, температуры и т. д. Их принцип действия основан на вариации активного электрического сопротивления под влиянием измеряемой величины. Для их питания могут использоваться источники постоянного или переменного тока. В зависимости от включения (как потенциометр или реостат) выходными параметрами будут напряжение или ток (pис. 3.16).
Многие рeзистивные датчики относятся к безынерционным звеньям; их чувствительность обычно лежит в пределах от 3 до 5 В/мм. Peзистивные датчики сопротивления могут быть каркасными и бескаркасными (жидкостными, электролитическими).
Âкаркасных (не электролитических) датчиках в качестве сопротивления используются высокоомная проволока, слой полупроводника или пленка металла. В зависимости от вида характеристики резистивные датчики могут быть линейными и нелинейными. Иногда преднамеренно характеристике датчика придают специальный нелинейный вид. C этой целью используют фигурные каркасы, шунтируют отдельные участки или выполняют их из материалов с различным удельным электрическим сопротивлением.
Электролитические датчики могут использоваться только в цепях переменного тока из-за разложения электролита и поляризации электродов при постоянном токе; их сопротивление сильно зависит от температуры.
Âрeзистивных датчиках положения подвижный элемент датчика механически связан с рабочим механизмом (РМ). Изменение положения рабочего механизма приводит к ответной вариации сопротивления датчика. Это сказывается на выходном сигнале в виде напряжения Uä (ðèñ.3.16,a) èëè òîêà
iä (ðèñ.3.16,á).
Раccматриваемые датчики весьма чувствительны, cпособны выдавать значительные выходные сигналы, значение которых, oднако, существенно зависит от сопротивления Ríä нагрузки датчика (рис.3.16,a), то eсть oт входного сопротивления элемента схемы, подключаемого к выходным зажимам датчика. Рассмотрим более подробно такой датчик. Если на первом этапе положить, что датчик работает на холостом ходу, т.е. его сопротивление
Ríä → ∞ , то выходное напряжение U xxä датчика на холостом ходу составит
U äxx = |
R1 |
U = Käàò U , |
(3.5) |
|
R1 + R2 |
||||
|
|
|
ãäå R1 è R2 – сопротивления плеч резистора (см. рис. 3.16,a); U – напряжение питания (входное напряжение) датчика: Êäàò = R1/R – коэффициент деления датчика; R = R1+ R2 – полное сопротивление резистора.
Если предположить, что на всей своей длине l резистор всюду однороден, то можно записать: R = γ l ; R1 = γ x ;R2 = γ (l − x) , где γ – коэффициент пропорциональности между линейными размерами различных участков резистора и электрическими сопротивлениями этих участков; x – координата смещения движка резистора относительно нулевого положения под действием рабочего механизма. При постулированных условиях выражение (3.5) можно переписать в виде:
U äxx = (x ⁄ l ) U . |
(3.6) |
Отсюда видно, что, чем больше смещение x, тем выше значение выходного напряжения U xxä . Оче- видно, что при x = l выходной сигнал будет максимальным и равным напряжению питания (см. рис. 3.16,â) .
Полученное соотношение (3.6) справедливо только для холостого хода, т.е. для очень больших сопротивлений Ríä. В общем случае, при произвольном значении R íä (0 ≤ R íä < ∞) , выходное на-
100

§ 3.2. Электромеханические датчики и требования, предъявляемые к ним
пряжение Uä датчика может быть выражено через напряжение U xxä холостого хода. Для этого можно
использовать теорему об эквивалентном генераторе [13] :
U ä = |
U äxx |
|
R ê + R íä R íä , |
(3.7) |
ãäå Rê – сопротивление короткого замыкания схемы относительно выходных зажимов.
Для рассматриваемого случая
R ê = |
R1 |
R2 |
|
= Käàò R2 . |
|
|||||||||||||
R1 + |
|
R2 |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Тогда (3.7) можно записать |
|
|||||||||||||||||
U ä = |
|
|
|
|
|
U äxx |
|
. |
|
|
||||||||
|
|
+ |
|
|
|
Käàò R2 |
|
|
||||||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
Ríä |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
С учетом принятых обозначений и соотношения |
||||||||||||||||||
(3.6) последнее равенство примет вид: |
|
|||||||||||||||||
U ä = |
|
|
|
|
|
|
x ⁄l |
|
|
|
U . |
|
||||||
|
|
|
|
x ⁄l |
|
|
|
|
||||||||||
1 + |
|
γ |
|
(l |
− x) |
|
||||||||||||
|
|
R |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
íä |
|
|
|
|
|
|
|
||||
Или окончательно |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
U ä = |
|
|
|
|
|
|
|
|
|
|
x ⁄l |
|
|
|
U . |
(3.8) |
||
|
l |
|
|
|
|
|
|
|
|
|||||||||
1 + |
γ |
[x ⁄l − (x ⁄l )2] |
|
|||||||||||||||
R |
í.ä |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Иногда выходное напряжение Uä выражают не в функции отношения (x / l), а в функции коэффициента Êäàò деления датчика:
Uä = |
|
Käàò |
U . (3.9) |
|
(R ⁄ Ríä) [Käàò − K äàò2 ] |
||
1 + |
|
||
В других случаях выходное напряжение датчика выражают через отношение æ = R1 / R2 сопротивлений его плеч:
Uä = |
|
|
æ |
|
U . |
(3.10) |
|
+ (2 + |
R ⁄ |
2 |
|||
1 |
Ríä) æ + æ |
|
|
|||
Из (3.8) следует:
• при неизменном напряжении U питания выходной сигнал Uä датчика будет зависеть лишь от отношения (x / l ) и значения сопротивления Ríä нагрузки датчика (см. рис. 3.16,â, характеристики 1–5), при этом рабочая зона датчика располагается в треугольнике А0Б, причем, чем меньше сопротивление Ríä, тем ниже проходит характеристика вход – выход и тем больше она отличается от линейной, при Ríä = 0 характеристика сливается
ñосью абсцисс;
•при неизменных отношении (x / l ) и сопро-
тивления Ríä нагрузки датчика выходное напряжение Uä на зажимах датчика будет строго пропорционально входному напряжению U.
Таким образом, на базе рассмотренной принципиальной схемы резистивного датчика перемещения (рис. 3.16) могут быть реализованы датчики электрических параметров: тока и напряжения. Реже применяют датчики частоты, мощности и датчики нуля тока или напряжения. Среди них можно выделить две группы датчиков: датчики постоянного тока или напряжения и датчики переменного тока или напряжения. Датчики переменных сигналов можно подразделить на датчики мгновенного, действующего и среднего значения.
Простейший датчик напряжения, наиболее широко применяемый в регуляторах постоянного тока, состоит из двух резисторов R1 è R2, соединенных по схеме делителя (аналогично рис.3.16,a). Как было показано выше, на вход поступает контролируемое напряжение U, а с выхода снимается выходное напряжение Uä, пропорциональное входному и связанное с ним посредством коэффициен-
òà Êäàò датчика .
Основные достоинства датчика на основе делителя напряжения: надежность, простота конструкции, линейность характеристики и безынерционность; к недостаткам можно отнести гальваническую связь между входом и выходом. Однако часто возникает необходимость обеспечения гальвани- ческой развязки между контролируемой цепью и системой управления. В частности гальваническая развязка может обеспечиваться оптоэлектронной парой, состоящей из светоизлучающего и фотоприемного элементов. В схеме датчика с опторазвязкой интенсивность свечения светодиода пропорциональна входному напряжению, а значе- ние выходного напряжения определяется фототранзистором, который управляется световым потоком светодиода. Основной недостаток этого датчи- ка заключается в том, что характеристика оптопары является нелинейной. В настоящее время в датчи- ках широко применяются интегральные оптопары, содержащие в одном корпусе светоизлучатель и фотоприемник, разделенные светопрозрачным материалом с высокой диэлектрической прочностью.
Другим способом обеспечения гальванической развязки в датчиках является применение высоко- частотного преобразователя с трансформаторной развязкой. Входное напряжение датчика инвертируется преобразователем Ïð в прямоугольное импульсное напряжение на высокой частоте (что снижает габаритные размеры трансформатора) с амплитудой, равной входному напряжению. Гальваническая развязка обеспечивается трансформатором, напряжение вторичной обмотки которого выпрямляется выпрямителем в выходное напряжение датчика, пропорциональное входному. Высо-
101
Гл. 3. Электромеханические аппараты автоматики
кочастотные пульсации фильтруются конденсатором C.
Датчики переменного тока, как правило, вклю- чают в себя маломощный понижающий трансформатор, обеспечивающий гальваническую развязку силовых цепей и системы управления. Для датчи- ков синусоидального напряжения характерно нали- чие выпрямителя с емкостным фильтром. Если входное напряжение синусоидально, то напряжение на конденсаторе пропорционально амплитудному, среднему и действующему значению контролируемого напряжения. Если входное напряжение искажается, то эти зависимости нарушаются. Поэтому для несинусоидальных сигналов датчики действующих и средних значений напряжений содержат функциональные блоки (интеграторы, перемножители и др.), необходимые для вычисления соответствующих значений.
Другим примером резистивного датчика перемещений, тока и напряжения может служить дат- чик, принципиальная схема котрого изображена на рис. 3.16,á. На его вход поступает контролируемое напряжение U, а с выхода снимается выходное напряжение Uд, пропорциональное перемещению x и входному напряжению U. Для датчика такого типа можно записать
U |
= i |
r Ríä |
, |
(3.11) |
|
||||
ä |
ä r + Ríä |
|
||
ãäå r – дополнительное сопротивление в цепи датчика.
Если учесть, что ток iä в цепи датчика можно выразить через входное напряжение U и сопротивления этой цепи
iä = |
|
U |
, |
|
Rl + |
r Ríä |
|||
|
|
|||
|
r + Ríä |
|
то с учетом принятых выше обозначений равенство (3.11) примет вид:
Uä = |
|
|
1 |
|
U . |
(3.12) |
|
|
1 + |
r ⁄Ríä |
|
||||
1 + |
γ l (1 − x ⁄ l ) |
|
|||||
|
r |
|
|
||||
|
|
|
|
|
|
||
Относительное изменение выходного напряжения Uä в зависимости от отношения x / l при различных значениях Ríä показано на рис. 3.16,ã. Из рисунка видно, что при реостатном включении резистора, так же как и при потенциометрическом его включении (рис. 3.16,à), выходное напряжение зависит от сопротивления Ríä нагрузки датчика. Поскольку это сопротивление в большинстве слу- чаев значительно больше дополнительного сопротивления r, то можно считать, что датчик работает на холостом ходу.
Сравнение характеристик вход – выход (рис. 3.16,â è ðèñ. 3.16,ã) резистивных датчиков при потенциометрическом (рис. 3.16,à) и реостатном (рис. 3.16,á) их включении показывает, что эти характеристики по своему виду очень похожи. Они отражают рост выходного сигнала при увеличении перемещения x рабочего механизма или при увеличении входного напряжения.
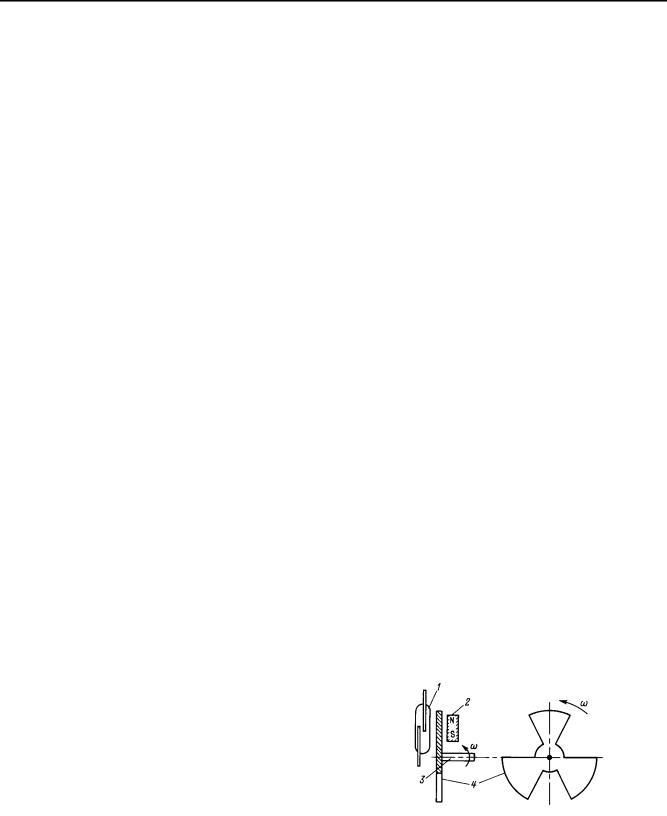
Датчик на герконах, принципиальная схема которого приведeна на рис. 3.17,a, служит для измерения частоты вращения и работает следующим образом. Meжду герконом 1 и постоянным магнитом 2 вращается профилированный ферромагнитный диск 4, укреплeнный на валу 3, частоту которого необходимо контролировать. При вращении вала диск своими лепестками периодически экранирует геркон от воздействия магнитного поля постоянного магнита 2. Это приводит к циклическому замыканию и размыканию контактных сердечников геркона 1. Выводные концы геркона подключены к счeтчику импульсов. Анализируя коли- чество импульсов, прошедших в единицу времени, можно судить о частоте вращения вала 3 [5, 42].
Cуществуют другие конструкции и принципы построения датчиков на герконах [3, 5, 42], но все они основаны на изменении магнитного поля в зоне перекрытия контактных сердечников геркона при вариации контролируемой величины.
Индуктивные датчики основаны на использовании изменения индуктивности под влиянием контролируемой величины; выходной сигнал и его фаза зависят от положения подвижного элемента. Индуктивные датчики используются для измерения перемещений и усилий. Эти датчики могут работать лишь с источниками переменного тока. По этой причине их ферромагнитные потокопроводящие части изготовляются из кремнистых сталей и, как правило, шихтованными. По сравнению с резистивными датчиками они менее чувствительны к колебаниям температуры, но весьма чувствительны к перепадам напряжения и частоты питающего напряжения, oбладают повышенной реакцией.
Pиc. 3.17. Peзистивный датчик оборотов на герконах
102
§ 3.2. Электромеханические датчики и требования, предъявляемые к ним
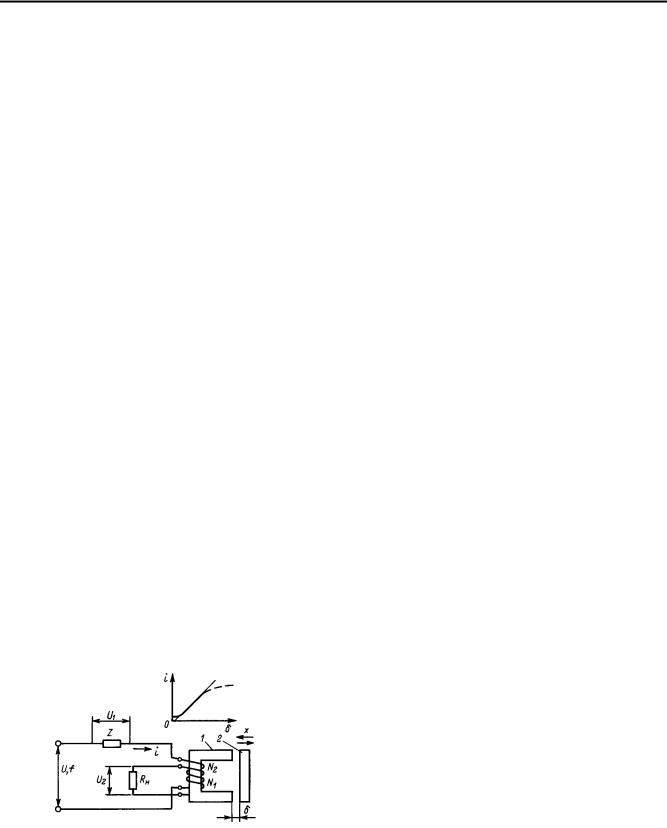
В качестве примера рассмотрим датчик линейных перемещений (рис. 3.18). Конструктивно он подобен П-образному электромагнитному реле с прямоходовым движением якоря. Обмотка датчика включается последовательно с измерительным прибором. B oтличие от реле она не должна создавать вполне определeнную МДС, обеспечивающую срабатывание, а служит лишь для перевода датчи- ка в разряд реактивных элементов. Для повышения чувствительности датчика обмотка выполняется с большим числом витков.
При перемещении контролируемого узла происходит изменение зазора между механически связанным с этим узлом якорем и магнитопроводом (рис. 3.18). Это приводит к изменению тока в цепи. Ecли не учитывать внутреннее сопротивление обмотки и потери в стали, то можно считать, что связь между током i в обмотке и зазором δ носит линейный характер, i = i (δ ).
Выходной сигнал в виде напряжения может сниматься с линейного балластного сопротивления Z (это может быть резистор, катушка индуктивности или конденсатор; напряжение на нeм изменяется прямопропорционально току в обмотке) или с зажимов самой обмотки. Иногда на одном магнитопроводе распологаются две обмотки с одинаковыми или разными числами витков N1 è N2. Это позволяет обеспечить на выходе датчика напряжение, необходимое для работы подключаемого к датчику последующего элемента схемы. Кроме того, нали- чие двух обмоток позволяет электрически развязать цепь питания датчика с цепью его нагрузки. Oбмотки N1 è N2 пронизываются одним и тем же магнитным потоком Φ , их магнитная связь не меняется при любых вариациях рабочего зазора δ , т. e. ocтаются неизменными взаимная индуктивность и коэффициент приведения.
Поскольку рассмотренный датчик не является идеальным, то его характеристика не всюду линейна (сплошная линия на графике, рис. 3.18). Из характеристики видно, что датчик обладает остаточным сигналом при δ = 0, xapaктеристика нелинейна при больших и малых зазорах.
Pиc. 3.18. Индуктивный датчик линейных перемещений: 1 – магнитопровод; 2 – якорь
Для борьбы с указанными недостатками обычно используется симметричная конструктивная схема датчика.
Магнитострикционные датчики основаны на использовании эффекта магнитострикции. Maгнитное поле, воздействуя на ферромагнитные материалы, вызывает в них определeнные изменения (прямой магнитострикционный эффект) [52]:
•геометрические (изменение линейных размеров с изменением объeма: cжатие, растяжение; изменение размеров без изменения объeма: круче- ние, изгиб);
•механические (изменение модуля Юнга).
Haoборот, любые механические напряжения и изменения размеров под воздействием внешних сил приводят к изменениям кривой намагничивания: значений коэрцитивной силы Hc, остаточной индукции Br, индукции насыщения Bs и формы петли гистерезиса (обратный магнитострикционный эффект). Проявление обратного магнитострикционного эффекта существенно зависит от значения и знака механического напряжения σ .
На подобном принципе построен датчик усилия (механического напряжения), использующий прямой магнитострикционный эффект, проявляющийся в изменении индуктивности системы в результате механического воздействия.
Tpaнсформаторные датчики можно рассматривать как частный случай индуктивных датчиков, oбладающих рядом специфических особенностей. Именно это позволяет выделить их в особую группу. Tpaнсформаторные датчики содержат две или более подвижных или неподвижных обмоток, часть из которых может быть короткозамкнутой. Работа этих датчиков основана на изменении магнитной связи между первичной (входной) и вторичными (выходными, сигнальными) обмотками, вызванном воздействием контролируемой величины. Трансформаторные датчики используются для измерения механических сил и перемещения, они надeжны в эксплуатации, имеют значительный выходной сигнал, который без усиления может использоваться в последующих элементах схемы. К недостаткам можно отнести увеличенные габаритные размеры, массу, инерционность и реакцию, чувствительность к колебаниям напряжения и частоты питающей сети.
Ha pèc. 3.19,à,á представлены cxeмы трансформаторных датчиков линейных перемещений. В первом случае при изменении положения якоря происходит перераспределение магнитных потоков в системе, что вызывает различие в наведeнных ЭДС сигнальных обмоток, появляется выходной сигнал, эквивалентный ходу x якоря. Во втором датчике,
103