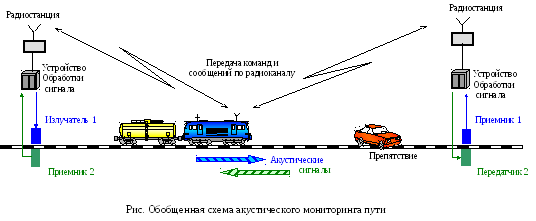
Физические предпосылки возможности акустической диагностики состояния контакта колесных пар с железнодорожным полотном
В предварительных оценках использованы исходные данные и технические требования приведенные выше. Оценки основаны на том, что в штатной ситуации акустический и вибрационный шум движущегося состава складывается из сигналов нескольких типов– различных как по природе (источникам) так и по форме спектра. Это прежде всего шум, создаваемый собственно двигательной установкой локомотива и шумы, создаваемые движущимися локомотивом и вагонами состава при взаимодействии колесных пар с полотном пути. Последний состоит из сплошного шума, связанного с трением подвижной части состава о полотно, полигармонического шума, связанного с вращением колес состава относительно осей колесных пар, а также импульсного шума.
Импульсный шум является одним из основных источников шума, наблюдаемого при движении состава по рельсам. Он генерируется главным образом при столкновении (ударе) колес со стыками рельсов и различного рода локальными неоднородностями полотна пути. Именно аномалии импульсного шума и предполагается использовать для диагностики состояния ходовой части состава.
Рассматриваемые ниже возможные пути построения системы приводятся для двух вариантов:
для длины состава не превышающей длины плети рельсов между стыками,
для произвольной протяженности состава относительно непрерывной длины рельсов (между стыками) полотна пути.
Возможность регистрации акустических импульсов даже от хвостовых вагонов поезда (длиной 1000 метров и более) не вызывает сомнения. Оптимизация частотного диапазона сигнала целесообразна только с точки зрения снижения потерь на поглощение звука при распространении сигнала вдоль плети рельса, что приводит к ограничению частоты сверху. С учетом скорости продольных волн в материале рельса порядка c = 5200 м/сек и высота рельса порядка h = 0,15 метра можно заключить, что на частотах ниже 15 000 Гц вдоль рельса сигнал распространяется, в основном, за счет нулевой моды колебаний. Принимая допустимое затухание не более 6 дБ на длину плети, что соответствует логарифмическому затуханию менее 0,006 дБ/м на частотах f < 1000 Гц. Основные потери в рельсе возникают в узлах крепления к шпалам.
Спектр вибрационного импульса, возбуждаемого ударом колеса о стык рельсов, можно считать в простейшем случае треугольным с максимумом на самых низких частотах, спадом частот приблизительно 6 дБ/октаву и характерной верхней частотой fгр порядка V/, где - расстояние (зазор) между соседними рельсами в стыке, а V – скорость поезда. Например, при порядка 0,01 м и скорости V порядка 50 м/сек, fгр оказывается порядка 5000 Гц. При снижении скорости состава величина fгр понижается. В виду достаточно низкочастотного спектра импульсов, создаваемых при взаимодействии колеса со стыком, другим видом потерь могут быть также потери сигнала на самых низких частотах. Эти потери определяются, в основном, пластической деформацией в подложке полотна, например, в щебне. Интенсивность импульсов может также несколько снижаться при использовании амортизирующих прокладок в стыках рельс при монтаже полотна. Ожидаемая временная протяженность импульсов имеет порядок (V/)-1.
В пределах одного вагона структура последовательности импульсов, в свою очередь, определяется расстоянием между осями колесных пар и колесных тележек в вагоне. В простейшем случае, когда длина состава не превышает непрерывной длины без-стыкового полотна, импульсный ударный шум состава характеризуется известной последовательностью импульсов, наблюдаемой на приемной стороне системы, а диагностика состояния состава сводится к простому подсчету числа импульсов и сравнении его с заданным числом. Разумеется, что при этом предполагается, что при формировании состава известны количество вагонов и их типы (т.е. число колесных пар), т.е. эталонное значение априорно известно
Более сложная ситуация возникает , когда длина состава превышает непрерывную длину плети. В этом случае на приемной стороне последовательности импульсов от разных колесных пар от двух соседних стыков могут накладываться друг на друга. Хотя и точное наложение импульсов из разных последовательностей друг на друга маловероятно, эта ситуация должна быть рассмотрена отдельно. Для ее однозначного решения необходимо привлекать дополнительную информацию не только о числе импульсов, но и их спектральном составе.
Действительно, оценки показывают, что прохождение сигнала через стык незначительно (около 20%), поэтому наблюдение сигнала от следующего стыка будет несколько ослабленным. Так, по предварительной оценке, в рассматриваемом случае в точке приема наблюдаемый сигнал уменьшится по сравнению с сигналом от ближайшего стыка еще на 20 дБ (в 10 раз) и может быть легко выделен при достаточно высоком входном динамическом диапазоне системы и без сложной обработки. Если в простейшем случае, возможен просто подсчет числа импульсов, то в сложном случае может потребоваться дополнительный спектрально-временной анализ, при котором можно избежать многозначности при наложении импульсов друг на друга.
Что касается заданных аномалий, то в простейшем случае, отцепление вагонов определяется просто по числу наблюдаемых импульсов, а сход вагонов, по нарушению априорно известной временной последовательности импульсов, а возможно также и по изменению их формы и спектрального состава. Заметим, что временная фильтрация импульсной последовательности также позволяет выделять и подвергать счету (анализу) набор импульсов от заданного числа вагонов.
Таким образом, предварительные оценки свидетельствуют о возможности создания акустической системы оперативной диагностики состояния контакта колесных пар вагонов состава с железнодорожным полотном.
Наиболее близким аналогом подобной системы являются акустические системы зондирования неоднородных средах с многолучевым распространением сигналов. Источник импульсного сигнала при этом перемещается относительно большого числа отражающих слоев среды с какой-то скоростью. Целью такого зондирования является определение какого-то заданного слоя. При этом результирующий сигнал состоит из временной последовательности импульсных сигналов с частичным перекрытием, и задача системы обработки заключается в выделении какого-либо конкретного сигнала.